






目录
线性插值,三次插值,样条插值,自适应接触有理插值在一维插值上的比较
双线性插值,双三次插值,双样条插值,双自适应接触有理插值在二维插值上的比较
Introduction
插值是一种在数学和计算机科学领域中常见的技术,它允许我们通过已知数据点的值来推断出在这些数据点之间的值。
常用的插值方法包括:线性插值,三次插值和样条插值,这里还介绍一种自适应接触有理插值方法。其中线性插值仅依赖于临近两个数据点,其余插值方法均被设计成依赖临近四个数据点。以上插值方法均可用于一维,二维和三维插值中,这里将讨论一维和二维插值。
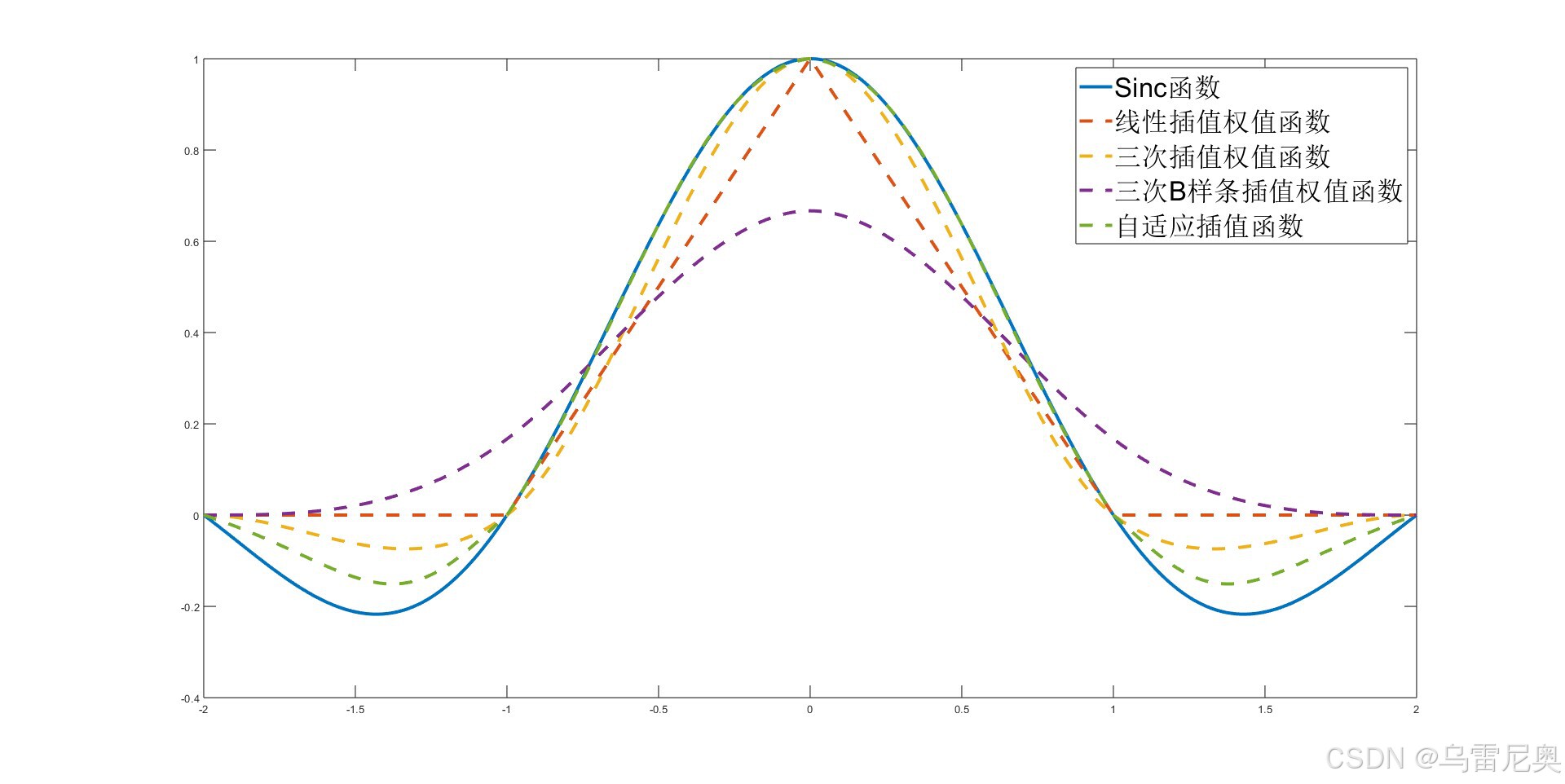
插值过程可简单认为是临近数据点的加权求和过程,这里以|X|表示用于插值的格点与目标插值点的距离。
所使用的线性插值权值函数表达如下:
所使用的三次插值权值函数表达如下:
当选择Catmull-Rom cubic为三次插值方法时,下式中的a = -0.5.
所使用的样条插值为三次B样条插值,其权值表达式如下:
所使用的自适应接触有理插值方法的权值函数如下所示:
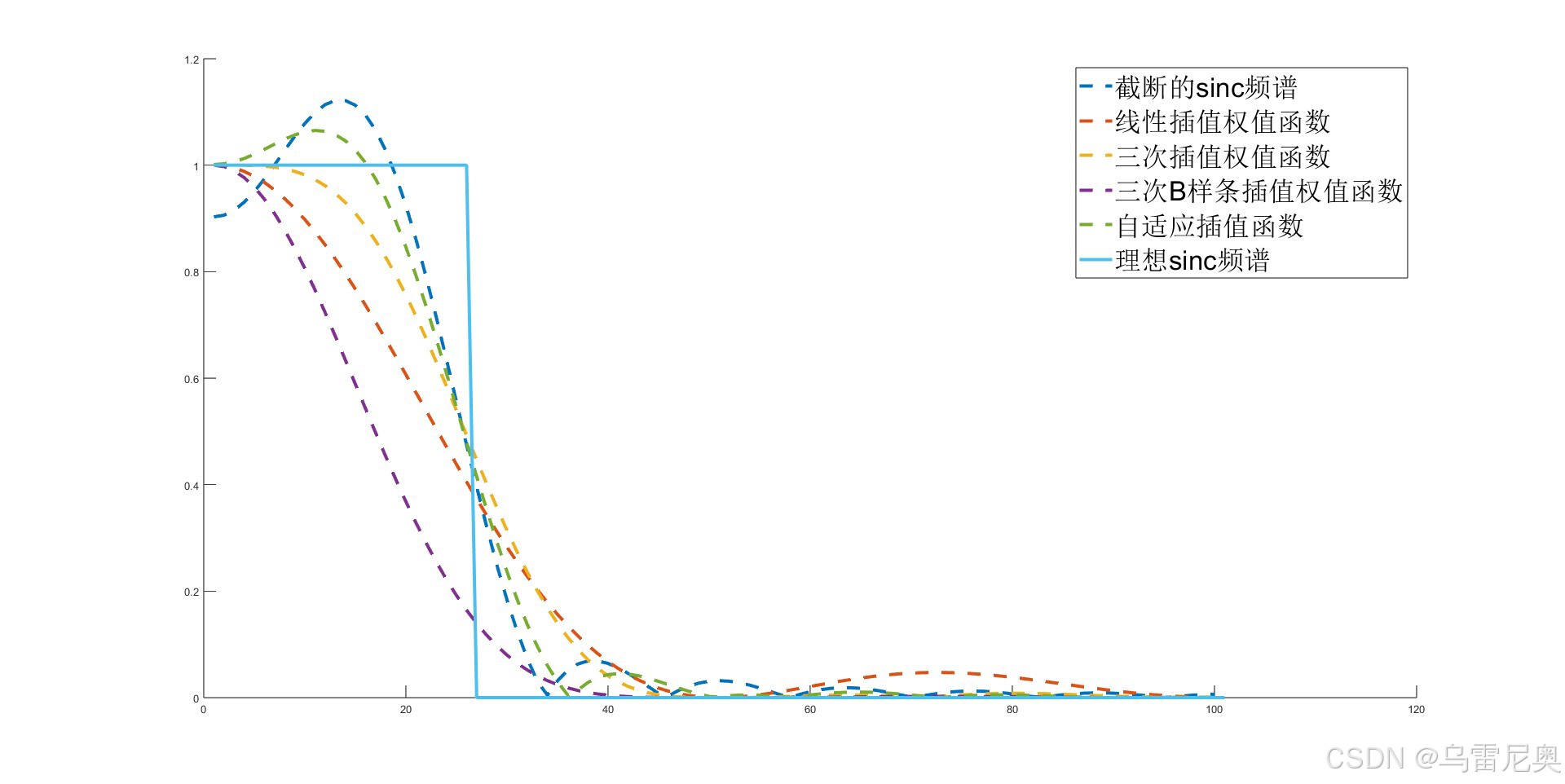
下面是各个插值方法的权值函数与Sinc函数的比较。通常情况下认为Sinc函数是理想插值核函数,但其在空间域上不存在紧凑集,因此一般将其在空间域进行裁剪。但裁剪后将破坏sinc函数的原始频谱特性,上述几种插值方法在时域和频域下的比较如下所示:
线性插值,三次插值,样条插值,自适应接触有理插值在一维插值上的比较
这里将展示上述几种插值方法在一维数据上插值结果的比较。
图示为原始数据向左偏移 3.25 个单位后的波形。可以观察到原始波形中正弦部分频率较低,插值效果较好,方波部分含有高频谐波,插值效果较差。频域相移也是时域插值的一个手段,这里也进行了比较。
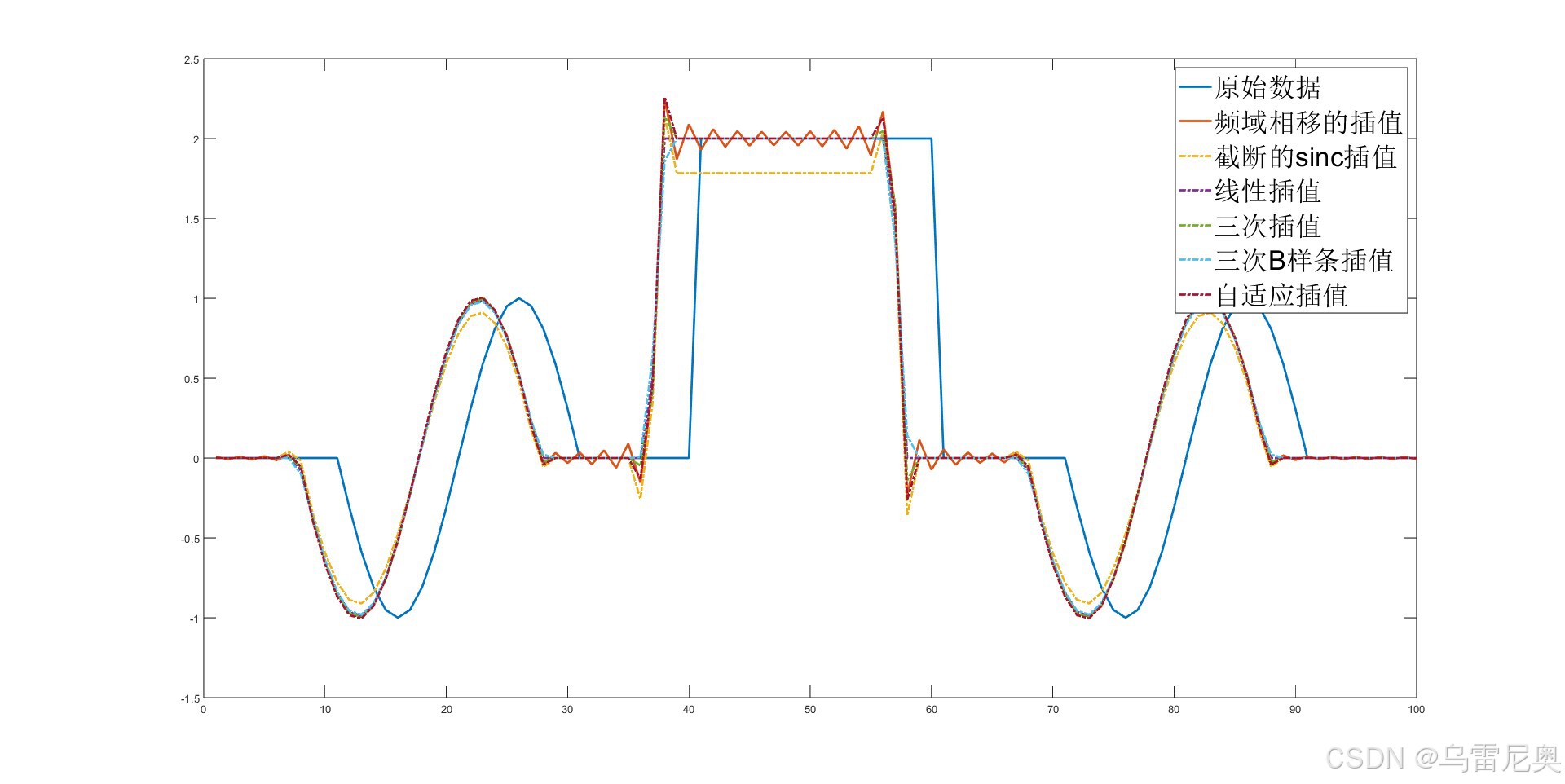
总结而言,各种方法均难以应对高频信息的插值,且插值权重函数在频谱图中的高频成分越多,时域插值时在高频区域“抖动”越明显。
下面是一维插值过程的Matlab脚本:
clc;
clear;
close all;
N_Original = 100;
fData_Original = zeros(1, N_Original);
% cos波形
f0 = 1;
fs = 20;
N_cos = 20;
n = 0 : 1 : N_cos - 1;
cos_y = cos(2 * pi * f0 * n / fs + pi / 2);
% 方波
N_square = 20;
Square_y = zeros(1, N_square);
Square_y(:) = 2;
N_interval = 10
fData_Original = [zeros(1, N_interval), cos_y, zeros(1, N_interval), Square_y, zeros(1, N_interval), cos_y, zeros(1, N_interval)];
fData_Original_Extend = [fData_Original(1), fData_Original, fData_Original(end)];
% 插值目标
fShift = 3.25;
nInterpolationNum = N_Original; % 插值基数据点数
fs = 1; % 采样率默认为1
% 频域相移实现时域插值
fft_fData = fft(fData_Original);
for k = 1: (nInterpolationNum / 2 + 1)
w(k) = exp(2i * pi * (k - 1) * fs / nInterpolationNum * fShift);
end
fft_fData_transform(1:(nInterpolationNum / 2 + 1)) = fft_fData(1:(nInterpolationNum / 2 + 1)) .* w;
for k = (nInterpolationNum/2 + 2): nInterpolationNum
fft_fData_transform(k) = complex(real(fft_fData_transform(nInterpolationNum + 2 - k)), - imag(fft_fData_transform(nInterpolationNum + 2 - k)));
end
ifft_fData_transform = ifft(fft_fData_transform);
ifft_fData_transform_real = real(ifft_fData_transform);
% 截断的sinc插值,三次插值,三次B样条插值,自适应插值
Sinc_interp_fData = zeros(nInterpolationNum, 1);
Cubic_interp_fData = zeros(nInterpolationNum, 1);
Cubic_Bspline_interp_fData = zeros(nInterpolationNum, 1);
Adapt_interp_fData = zeros(nInterpolationNum, 1);
for i = 1 : nInterpolationNum
base_index = i + fShift;
pre_interp_base_index_2 = floor(base_index) + 1;
pre_interp_base_index_1 = pre_interp_base_index_2 - 1;
pos_interp_base_index_2 = pre_interp_base_index_2 + 1;
pos_interp_base_index_1 = pos_interp_base_index_2 + 1;
if (pre_interp_base_index_2 > nInterpolationNum + 1)
pre_interp_base_index_2 = nInterpolationNum + 1;
end
if (pre_interp_base_index_1 > nInterpolationNum + 1)
pre_interp_base_index_1 = nInterpolationNum + 1;
end
if (pos_interp_base_index_1 > nInterpolationNum + 1)
pos_interp_base_index_1 = nInterpolationNum + 1;
end
if (pos_interp_base_index_2 > nInterpolationNum + 1)
pos_interp_base_index_2 = nInterpolationNum + 1;
end
delta_Pre_X_2 = base_index - floor(base_index);
delta_Pre_X_1 = delta_Pre_X_2 + 1;
delta_Pos_X_2 = 1 - delta_Pre_X_2;
delta_Pos_X_1 = delta_Pos_X_2 + 1;
% 截断的sinc插值
Sinc_interp_fData(i) = sinc(delta_Pre_X_2) * fData_Original_Extend(pre_interp_base_index_2) + ...
sinc(delta_Pre_X_1) * fData_Original_Extend(pre_interp_base_index_1) + ...
sinc(delta_Pos_X_2) * fData_Original_Extend(pos_interp_base_index_2) + ...
sinc(delta_Pos_X_1) * fData_Original_Extend(pos_interp_base_index_1);
% 三次插值
W_delta_Pre_X_2 = 1.5 * delta_Pre_X_2^3 - 2.5 * delta_Pre_X_2^2 + 1;
W_delta_Pre_X_1 = -0.5 * delta_Pre_X_1^3 + 2.5 * delta_Pre_X_1^2 - 4 * delta_Pre_X_1 + 2;
W_delta_Pos_X_2 = 1.5 * delta_Pos_X_2^3 - 2.5 * delta_Pos_X_2^2 + 1;
W_delta_Pos_X_1 = -0.5 * delta_Pos_X_1^3 + 2.5 * delta_Pos_X_1^2 - 4 * delta_Pos_X_1 + 2;
Cubic_interp_fData(i) = W_delta_Pre_X_1 * fData_Original_Extend(pre_interp_base_index_1) + ...
W_delta_Pre_X_2 * fData_Original_Extend(pre_interp_base_index_2) + ...
W_delta_Pos_X_1 * fData_Original_Extend(pos_interp_base_index_1) + ...
W_delta_Pos_X_2 * fData_Original_Extend(pos_interp_base_index_2);
% 三次B样条插值
W_delta_Pre_X_1 = -(1 / 6) * delta_Pre_X_1^3 + delta_Pre_X_1^2 - 2 * delta_Pre_X_1 + (4 / 3);
W_delta_Pre_X_2 = 0.5 * delta_Pre_X_2^3 - delta_Pre_X_2^2 + (2 / 3);
W_delta_Pos_X_2 = 0.5 * delta_Pos_X_2^3 - delta_Pos_X_2^2 + (2 / 3);
W_delta_Pos_X_1 = -(1 / 6) * delta_Pos_X_1^3 + delta_Pos_X_1^2 - 2 * delta_Pos_X_1 + (4 / 3);
Cubic_Bspline_interp_fData(i) = W_delta_Pre_X_1 * fData_Original_Extend(pre_interp_base_index_1) + ...
W_delta_Pre_X_2 * fData_Original_Extend(pre_interp_base_index_2) + ...
W_delta_Pos_X_1 * fData_Original_Extend(pos_interp_base_index_1) + ...
W_delta_Pos_X_2 * fData_Original_Extend(pos_interp_base_index_2);
% 自适应插值
W_delta_Pre_X_1 = (0.1953 * delta_Pre_X_1^2 - 0.5858 * delta_Pre_X_1 + 0.3905) / (delta_Pre_X_1^2 - 2.4402 * delta_Pre_X_1 + 1.7676);
W_delta_Pre_X_2 = (-0.168 * delta_Pre_X_2^2 - 0.9129 * delta_Pre_X_2 + 1.0808) / (delta_Pre_X_2^2 - 0.8319 * delta_Pre_X_2 + 1.0808);
W_delta_Pos_X_2 = (-0.168 * delta_Pos_X_2^2 - 0.9129 * delta_Pos_X_2 + 1.0808) / (delta_Pos_X_2^2 - 0.8319 * delta_Pos_X_2 + 1.0808);
W_delta_Pos_X_1 = (0.1953 * delta_Pos_X_1^2 - 0.5858 * delta_Pos_X_1 + 0.3905) / (delta_Pos_X_1^2 - 2.4402 * delta_Pos_X_1 + 1.7676);
Adapt_interp_fData(i) = W_delta_Pre_X_1 * fData_Original_Extend(pre_interp_base_index_1) + ...
W_delta_Pre_X_2 * fData_Original_Extend(pre_interp_base_index_2) + ...
W_delta_Pos_X_1 * fData_Original_Extend(pos_interp_base_index_1) + ...
W_delta_Pos_X_2 * fData_Original_Extend(pos_interp_base_index_2);
end
% 线性插值
Line_interp_fData = zeros(nInterpolationNum, 1);
for i = 1 : nInterpolationNum
base_index = i + fShift;
pre_interp_base_index = floor(base_index);
pos_interp_base_index = pre_interp_base_index + 1;
if (pre_interp_base_index > nInterpolationNum)
pre_interp_base_index = nInterpolationNum;
end
if (pos_interp_base_index > nInterpolationNum)
pos_interp_base_index = nInterpolationNum;
end
delta_X = base_index - floor(base_index);
Line_interp_fData(i) = (1 - delta_X) * fData_Original(pre_interp_base_index) + delta_X * fData_Original(pos_interp_base_index);
end
figure(1),
plot(fData_Original, 'LineWidth', 2);
hold on,
plot(ifft_fData_transform_real, 'LineWidth', 2);
hold on,
plot(Sinc_interp_fData, '-.', 'LineWidth', 2);
hold on,
plot(Line_interp_fData, '-.', 'LineWidth', 2);
hold on,
plot(Cubic_interp_fData, '-.', 'LineWidth', 2);
hold on,
plot(Cubic_Bspline_interp_fData, '-.', 'LineWidth', 2);
hold on,
plot(Adapt_interp_fData, '-.', 'LineWidth', 2);
legend('原始数据','频域相移的插值', '截断的sinc插值', '线性插值','三次插值','三次B样条插值','自适应插值', 'fontsize', 25);双线性插值,双三次插值,双样条插值,双自适应接触有理插值在二维插值上的比较
这里将展示上述几种插值方法在二维图像上插值结果的比较。
图示为原图放大 2倍 后的图像。可以观察到,插值权重函数频谱图中,高频成分越多,插值结果保留的高频信息越丰富,下图所示双自适应有理接触式插值结果的图像最锐利。

下面是二维插值过程的Matlab脚本:
clc;
clear;
close all;
% 读取图片
imageData = imread('qq.png');
imageData = rgb2gray(imageData);
figure(1);
imshow(imageData);
title('原图', 'fontsize', 17);
% 原始图片维度
dims = size(imageData);
rowCount = dims(1); % 矩阵的行数
colCount = dims(2); % 矩阵的列数
% 目标插值后图片维度
Ratio = 2;
Interp_rowCount = Ratio * rowCount;
Interp_colCount = Ratio * colCount;
% 图片延拓一个像素(延拓方式为取边缘像素点值)
Extend_imageData = double(padarray(imageData, [1 1], 'replicate'));
% 图片延拓两个像素(延拓方式为取边缘像素点值)
Extend_Bi_imageData = double(padarray(imageData, [2 2], 'replicate'));
% 线性插值
Liner_Interp_imageData = zeros(Interp_rowCount, Interp_colCount);
for i = 1 : Interp_rowCount
for j = 1 : Interp_colCount
Index_X_Target = j;
Index_Y_Target = i;
First_Ori_Index_in_Target = (Ratio + 1) / 2;
Index_X_Ori = floor((Index_X_Target - First_Ori_Index_in_Target) / Ratio + 1);
Index_Y_Ori = floor((Index_Y_Target - First_Ori_Index_in_Target) / Ratio + 1);
% 目标点左上角网格点的坐标
Index_X_Ori_in_Target = First_Ori_Index_in_Target + (Index_X_Ori - 1) * Ratio;
Index_Y_Ori_in_Target = First_Ori_Index_in_Target + (Index_Y_Ori - 1) * Ratio;
% 双线性插值————权重函数
delta_X = (Index_X_Target - Index_X_Ori_in_Target) / Ratio;
delta_Y = (Index_Y_Target - Index_Y_Ori_in_Target) / Ratio;
Pre_Index_X_in_Extend = Index_X_Ori + 1;
Pos_Index_X_in_Extend = Pre_Index_X_in_Extend + 1;
Pre_Index_Y_in_Extend = Index_Y_Ori + 1;
Pos_Index_Y_in_Extend = Pre_Index_Y_in_Extend + 1;
Value_Target = (1 - delta_X) * (1 - delta_Y) * Extend_imageData(Pre_Index_Y_in_Extend, Pre_Index_X_in_Extend) +...
(1 - delta_X) * delta_Y * Extend_imageData(Pos_Index_Y_in_Extend, Pre_Index_X_in_Extend) +...
delta_X * (1 - delta_Y) * Extend_imageData(Pre_Index_Y_in_Extend, Pos_Index_X_in_Extend) +...
delta_X * delta_Y * Extend_imageData(Pos_Index_Y_in_Extend, Pos_Index_X_in_Extend);
Liner_Interp_imageData(i, j) = Value_Target;
end
end
figure(3);
imshow(uint8(Liner_Interp_imageData));
title('双线性插值结果', 'fontsize', 17);
% 双三次插值
Bicubic_Interp_imageData = zeros(Interp_rowCount, Interp_colCount);
for i = 1 : Interp_rowCount
for j = 1 : Interp_colCount
Index_X_Target = j;
Index_Y_Target = i;
First_Ori_Index_in_Target = (Ratio + 1) / 2;
Index_X_Ori = floor((Index_X_Target - First_Ori_Index_in_Target) / Ratio + 1);
Index_Y_Ori = floor((Index_Y_Target - First_Ori_Index_in_Target) / Ratio + 1);
% 目标点左上角网格点的坐标
Index_X_Ori_in_Target = First_Ori_Index_in_Target + (Index_X_Ori - 1) * Ratio;
Index_Y_Ori_in_Target = First_Ori_Index_in_Target + (Index_Y_Ori - 1) * Ratio;
delta_Pre_X_1 = (Index_X_Target - (Index_X_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_X_2 = (Index_X_Target - Index_X_Ori_in_Target) / Ratio;
delta_Pos_X_2 = 1 - delta_Pre_X_2;
delta_Pos_X_1 = delta_Pos_X_2 + 1;
delta_Pre_Y_1 = (Index_Y_Target - (Index_Y_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_Y_2 = (Index_Y_Target - Index_Y_Ori_in_Target) / Ratio;
delta_Pos_Y_2 = 1 - delta_Pre_Y_2;
delta_Pos_Y_1 = delta_Pos_Y_2 + 1;
% 双三次插值————权重函数
W_delta_Pre_X_1 = -0.5 * delta_Pre_X_1^3 + 2.5 * delta_Pre_X_1^2 - 4 * delta_Pre_X_1 + 2;
W_delta_Pre_X_2 = 1.5 * delta_Pre_X_2^3 - 2.5 * delta_Pre_X_2^2 + 1;
W_delta_Pos_X_2 = 1.5 * delta_Pos_X_2^3 - 2.5 * delta_Pos_X_2^2 + 1;
W_delta_Pos_X_1 = -0.5 * delta_Pos_X_1^3 + 2.5 * delta_Pos_X_1^2 - 4 * delta_Pos_X_1 + 2;
W_delta_Pre_Y_1 = -0.5 * delta_Pre_Y_1^3 + 2.5 * delta_Pre_Y_1^2 - 4 * delta_Pre_Y_1 + 2;
W_delta_Pre_Y_2 = 1.5 * delta_Pre_Y_2^3 - 2.5 * delta_Pre_Y_2^2 + 1;
W_delta_Pos_Y_2 = 1.5 * delta_Pos_Y_2^3 - 2.5 * delta_Pos_Y_2^2 + 1;
W_delta_Pos_Y_1 = -0.5 * delta_Pos_Y_1^3 + 2.5 * delta_Pos_Y_1^2 - 4 * delta_Pos_Y_1 + 2;
Pre_Index_X_in_Extend_1 = Index_X_Ori + 1;
Pre_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_1 + 1;
Pos_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_2 + 1;
Pos_Index_X_in_Extend_1 = Pos_Index_X_in_Extend_2 + 1;
Pre_Index_Y_in_Extend_1 = Index_Y_Ori + 1;
Pre_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_1 + 1;
Pos_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_2 + 1;
Pos_Index_Y_in_Extend_1 = Pos_Index_Y_in_Extend_2 + 1;
Value_Target = W_delta_Pre_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1);
Bicubic_Interp_imageData(i, j) = Value_Target;
end
end
figure(5);
imshow(uint8(Bicubic_Interp_imageData));
title('双三次插值结果', 'fontsize', 17);
% 双三次B样条插值
Bicubic_BLine_Interp_imageData = zeros(Interp_rowCount, Interp_colCount);
for i = 1 : Interp_rowCount
for j = 1 : Interp_colCount
Index_X_Target = j;
Index_Y_Target = i;
First_Ori_Index_in_Target = (Ratio + 1) / 2;
Index_X_Ori = floor((Index_X_Target - First_Ori_Index_in_Target) / Ratio + 1);
Index_Y_Ori = floor((Index_Y_Target - First_Ori_Index_in_Target) / Ratio + 1);
% 目标点左上角网格点的坐标
Index_X_Ori_in_Target = First_Ori_Index_in_Target + (Index_X_Ori - 1) * Ratio;
Index_Y_Ori_in_Target = First_Ori_Index_in_Target + (Index_Y_Ori - 1) * Ratio;
delta_Pre_X_1 = (Index_X_Target - (Index_X_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_X_2 = (Index_X_Target - Index_X_Ori_in_Target) / Ratio;
delta_Pos_X_2 = 1 - delta_Pre_X_2;
delta_Pos_X_1 = delta_Pos_X_2 + 1;
delta_Pre_Y_1 = (Index_Y_Target - (Index_Y_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_Y_2 = (Index_Y_Target - Index_Y_Ori_in_Target) / Ratio;
delta_Pos_Y_2 = 1 - delta_Pre_Y_2;
delta_Pos_Y_1 = delta_Pos_Y_2 + 1;
% 双三次B样条插值————权重函数
W_delta_Pre_X_1 = -(1 / 6) * delta_Pre_X_1^3 + delta_Pre_X_1^2 - 2 * delta_Pre_X_1 + (4 / 3);
W_delta_Pre_X_2 = 0.5 * delta_Pre_X_2^3 - delta_Pre_X_2^2 + (2 / 3);
W_delta_Pos_X_2 = 0.5 * delta_Pos_X_2^3 - delta_Pos_X_2^2 + (2 / 3);
W_delta_Pos_X_1 = -(1 / 6) * delta_Pos_X_1^3 + delta_Pos_X_1^2 - 2 * delta_Pos_X_1 + (4 / 3);
W_delta_Pre_Y_1 = -(1 / 6) * delta_Pre_Y_1^3 + delta_Pre_Y_1^2 - 2 * delta_Pre_Y_1 + (4 / 3);
W_delta_Pre_Y_2 = 0.5 * delta_Pre_Y_2^3 - delta_Pre_Y_2^2 + (2 / 3);
W_delta_Pos_Y_2 = 0.5 * delta_Pos_Y_2^3 - delta_Pos_Y_2^2 + (2 / 3);
W_delta_Pos_Y_1 = -(1 / 6) * delta_Pos_Y_1^3 + delta_Pos_Y_1^2 - 2 * delta_Pos_Y_1 + (4 / 3);
Pre_Index_X_in_Extend_1 = Index_X_Ori + 1;
Pre_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_1 + 1;
Pos_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_2 + 1;
Pos_Index_X_in_Extend_1 = Pos_Index_X_in_Extend_2 + 1;
Pre_Index_Y_in_Extend_1 = Index_Y_Ori + 1;
Pre_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_1 + 1;
Pos_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_2 + 1;
Pos_Index_Y_in_Extend_1 = Pos_Index_Y_in_Extend_2 + 1;
Value_Target = W_delta_Pre_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1);
Bicubic_BLine_Interp_imageData(i, j) = Value_Target;
end
end
figure(6);
imshow(uint8(Bicubic_BLine_Interp_imageData));
title('双三次B样条插值结果', 'fontsize', 17);
% 双自适应有理接触式插值
BiAdpat_sculatory_rational_Interp_imageData = zeros(Interp_rowCount, Interp_colCount);
for i = 1 : Interp_rowCount
for j = 1 : Interp_colCount
Index_X_Target = j;
Index_Y_Target = i;
First_Ori_Index_in_Target = (Ratio + 1) / 2;
Index_X_Ori = floor((Index_X_Target - First_Ori_Index_in_Target) / Ratio + 1);
Index_Y_Ori = floor((Index_Y_Target - First_Ori_Index_in_Target) / Ratio + 1);
% 目标点左上角网格点的坐标
Index_X_Ori_in_Target = First_Ori_Index_in_Target + (Index_X_Ori - 1) * Ratio;
Index_Y_Ori_in_Target = First_Ori_Index_in_Target + (Index_Y_Ori - 1) * Ratio;
delta_Pre_X_1 = (Index_X_Target - (Index_X_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_X_2 = (Index_X_Target - Index_X_Ori_in_Target) / Ratio;
delta_Pos_X_2 = 1 - delta_Pre_X_2;
delta_Pos_X_1 = delta_Pos_X_2 + 1;
delta_Pre_Y_1 = (Index_Y_Target - (Index_Y_Ori_in_Target - Ratio)) / Ratio;
delta_Pre_Y_2 = (Index_Y_Target - Index_Y_Ori_in_Target) / Ratio;
delta_Pos_Y_2 = 1 - delta_Pre_Y_2;
delta_Pos_Y_1 = delta_Pos_Y_2 + 1;
% 双自适应有理接触式插值————权重函数
W_delta_Pre_X_1 = (0.1953 * delta_Pre_X_1^2 - 0.5858 * delta_Pre_X_1 + 0.3905) / (delta_Pre_X_1^2 - 2.4402 * delta_Pre_X_1 + 1.7676);
W_delta_Pre_X_2 = (-0.168 * delta_Pre_X_2^2 - 0.9129 * delta_Pre_X_2 + 1.0808) / (delta_Pre_X_2^2 - 0.8319 * delta_Pre_X_2 + 1.0808);
W_delta_Pos_X_2 = (-0.168 * delta_Pos_X_2^2 - 0.9129 * delta_Pos_X_2 + 1.0808) / (delta_Pos_X_2^2 - 0.8319 * delta_Pos_X_2 + 1.0808);
W_delta_Pos_X_1 = (0.1953 * delta_Pos_X_1^2 - 0.5858 * delta_Pos_X_1 + 0.3905) / (delta_Pos_X_1^2 - 2.4402 * delta_Pos_X_1 + 1.7676);
W_delta_Pre_Y_1 = (0.1953 * delta_Pre_Y_1^2 - 0.5858 * delta_Pre_Y_1 + 0.3905) / (delta_Pre_Y_1^2 - 2.4402 * delta_Pre_Y_1 + 1.7676);
W_delta_Pre_Y_2 = (-0.168 * delta_Pre_Y_2^2 - 0.9129 * delta_Pre_Y_2 + 1.0808) / (delta_Pre_Y_2^2 - 0.8319 * delta_Pre_Y_2 + 1.0808);
W_delta_Pos_Y_2 = (-0.168 * delta_Pos_Y_2^2 - 0.9129 * delta_Pos_Y_2 + 1.0808) / (delta_Pos_Y_2^2 - 0.8319 * delta_Pos_Y_2 + 1.0808);
W_delta_Pos_Y_1 = (0.1953 * delta_Pos_Y_1^2 - 0.5858 * delta_Pos_Y_1 + 0.3905) / (delta_Pos_Y_1^2 - 2.4402 * delta_Pos_Y_1 + 1.7676);
Pre_Index_X_in_Extend_1 = Index_X_Ori + 1;
Pre_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_1 + 1;
Pos_Index_X_in_Extend_2 = Pre_Index_X_in_Extend_2 + 1;
Pos_Index_X_in_Extend_1 = Pos_Index_X_in_Extend_2 + 1;
Pre_Index_Y_in_Extend_1 = Index_Y_Ori + 1;
Pre_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_1 + 1;
Pos_Index_Y_in_Extend_2 = Pre_Index_Y_in_Extend_2 + 1;
Pos_Index_Y_in_Extend_1 = Pos_Index_Y_in_Extend_2 + 1;
Value_Target = W_delta_Pre_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_1 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pre_Y_2 * Extend_Bi_imageData(Pre_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_2 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_2, Pos_Index_X_in_Extend_1) +...
W_delta_Pre_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_1) +...
W_delta_Pre_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pre_Index_X_in_Extend_2) +...
W_delta_Pos_X_2 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_2) +...
W_delta_Pos_X_1 * W_delta_Pos_Y_1 * Extend_Bi_imageData(Pos_Index_Y_in_Extend_1, Pos_Index_X_in_Extend_1);
BiAdpat_sculatory_rational_Interp_imageData(i, j) = Value_Target;
end
end
figure(7);
imshow(uint8(BiAdpat_sculatory_rational_Interp_imageData));
title('双自适应有理接触式插值结果', 'fontsize', 17);附录
这里将介绍自适应接触式有理插值方法。
自适应接触式有理插值本质上是使用 Thiele 型连分式插值方法去逼近Sinc函数:

上图中的 Rn(x) 即为连分式插值函数,插值的目标即是在 (-2, 2) 区间内逼近理想的插值权重函数Sinc,同时做一些调整。上述连分式插值函数形式有些类似牛顿插值。
权重函数具有对称性,逼近过程分为两步:1. 在 [0, 1] 区间内逼近Sinc函数;2. 在 (1, 2] 区间内进行自适应调整。
在上述考量之下,所述的自适应接触式有理插值权重函数表达式如下:
上式中 (1, 2] 区间下的常数项 a1,b1,c1,c2 与插值点与最邻近网格点(插值基)的距离 d 相关,即权重函数与插值点的位置相关,因此称之为“自适应”。前述的“自适应接触有理插值方法的权值函数”为 d = 0.25 时的表达式。
理论上,插值过程不用完全精确,不需要针对每个 d 都计算一次插值常数项。下面给出一些 d 下的常数项值,可供直接查表使用:
| d | a1 | b1 | c1 | b2 | c2 |
| 0.1 | 0.3428 | -1.0285 | 0.6856 | -2.3438 | 1.8931 |
| 0.2 | 0.2494 | -0.7482 | 0.4988 | -2.3928 | 1.7957 |
| 0.25 | 0.1952 | -0.5857 | 0.3905 | -2.4403 | 1.7677 |
| 0.3 | 0.1393 | -0.4178 | 0.2786 | -2.5085 | 1.7676 |
| 0.4 | 0.0410 | -0.1231 | 0.0820 | -2.7164 | 1.8997 |
以上参数经过实际测试,发现效果很难及预期。推测该方法存在缺陷,当使用自适应接触有理插值方法时,建议仅使用 d = 0.25 下的参数。
写这些主要是阅读文献后进行本地复现的一些所思所感,如有错误请不吝赐教。
下面是参考资料:
https://www.sciencedirect.com/science/article/pii/S0377042705004711(如无法跳转请直接复制至谷歌浏览器的搜索框中)

















 1749
1749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









