






1、为何要提出CNN?
一张图片,在数学的世界里,是由一个个像素点组成的;而一个像素点,又是由RGB三元色按一定比例混合而成的。所以,一张图片可以由R、G、B三个数值矩阵所表示。如图1.1所示(由于未找到合适的彩色图像,这里用灰度图示例,灰度图由单一数值矩阵构成,而彩色图则包含三个矩阵):
图片来源于博主 IronmanJay
在传统神经网络中,我们需要输入数据的特征,而这个特征只能是一维的;但是对于图片,它的特征是一个个的像素点,这些像素点被储存在矩阵中,以二维的形式存在,显然是无法输入到传统神经网络中去的。在卷积出现之前,我们的做法是将二维特征拉伸成一维,再输入神经网络。虽然解决了输入端的问题,但却导致了信息损失:在二维像素矩阵中,每个像素点与其周围的像素点存在着空间关系,一旦展平成一维,这些宝贵的位置信息便丢失了,从而影响了模型的预测效果。
此外,图片由成千上万的像素点组成,如果采用全连接层,将产生巨大的参数数量,这样的训练成本往往是不可承受的。
1998年,Yann LeCun等人发表论文《Gradient-based learning applied to document recognition》正式提出了CNN的概念,很好地解决了图片特征提取的问题。下面,我们就来详细介绍一下CNN的原理。
2、如何实现CNN?
2.1 CNN与传统神经网络的结构差异
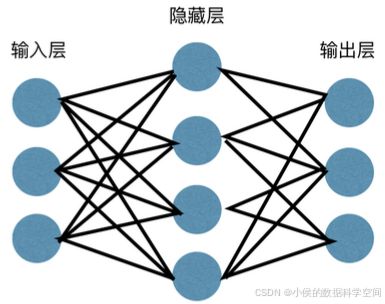
传统神经网络由输入层、隐藏层(位于输入层和输出层之间)和输出层组成,每层由一字排开的全连接的神经元构成,如图2.1所示:
显然,这种结构无法直接处理二维特征矩阵输入。因此,在CNN中,我们对输入层和隐藏层的结构进行了调整(输出层保持不变,原因后续解释),如图2.2所示:

我们可以看到,CNN的输入层接受二维数值矩阵,而隐藏层由传统的全连接层变为了卷积层和池化层;最后通过全连接层进行输出。输入端的改变是为了适应二维矩阵输入;输出端保持不变是因为无论哪种神经网络,我们的最终任务是相同的,因此输出层的结构也应保持一致。现在,我们重点关注隐藏层的变化。隐藏层的目标是提取特征和融合信息,供输出层做出最佳判断。那么,池化层和卷积层是如何实现这一目标的呢?接下来的内容将对此进行详细介绍。
2.2 卷积层
卷积层作为CNN隐藏层的核心结构,其目的是提取并浓缩图片的二维矩阵信息。在传统神经网络中,一个隐藏层包含n个神经元;而在CNN中,一个卷积层包含n个卷积核。卷积核本身也是一个二维矩阵,尺寸小于输入矩阵,通过在输入矩阵上滑动并执行计算,实现信息提取。具体的运算步骤如图2.3所示:
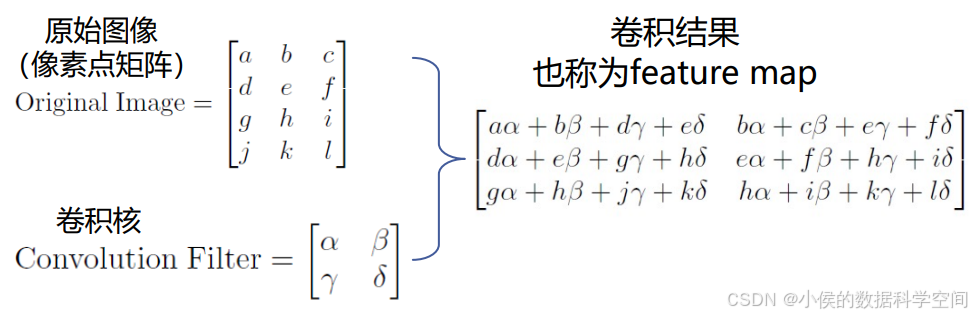
图2.4是一个具体的例子:
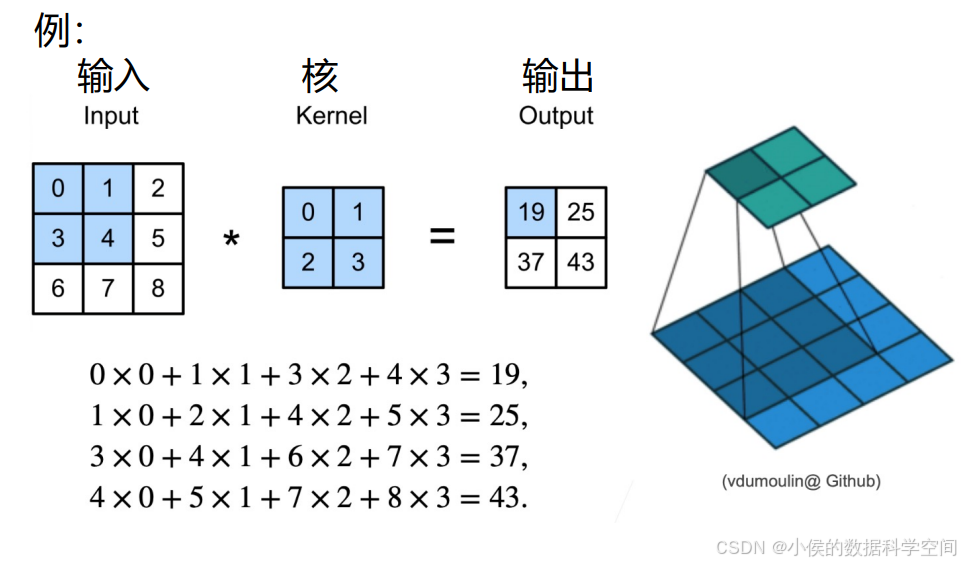
图2.5是卷积核滑动的动图演示:
图片来自于博主 IronmanJay
2.2.1 易混淆点:卷积核的层数与卷积核的数量
为了解释清楚这个概念,我们必须引入通道的概念:
- 通道(channel):
- 图像通道:输入层数据的通道数。例如,在彩色图像中,通道指的是颜色的组成部分,通常是红色(Red)、绿色(Green)、蓝色(Blue)三种颜色,分别对应三个独立的通道。每个通道包含了图像在该颜色维度上的强度信息。
- 特征通道:除了输入层的通道外,网络的每一层卷积层都可以生成多个特征通道,每个通道提取输入数据的不同特征,例如边缘、纹理、形状等。特征通道的数量由该层的卷积核数量决定,例如,某个卷积层有16个卷积核,则该层的输出将具有16个通道
卷积核的数量可以根据需要设定,但每个卷积核的层数取决于其所作用数据的通道数。第一个卷积层的卷积核数等于图像通道数,后面的卷积层中的卷积核数等于特征通道数。例如,在图2.5中,输入数据有3个通道,因此每个卷积核也必须有3层。经过卷积层处理后,传入下一个卷积层的数据通道数将等于上一层设定的卷积核数量。每个卷积核产生一个特征通道。
2.3 池化层
继卷积层提取特征之后,池化层接棒进一步处理这些特征信息。池化层的主要目的是降低数据的空间维度,从而减少计算量,并使特征检测更加鲁棒。这一过程同时保留了重要的特征信息,确保了模型对输入数据的泛化能力。
池化操作通常在卷积层输出的特征图上进行。想象一下,特征图是一块由多个小网格组成的大画布,每个小网格包含了卷积层提取的特定特征。池化层的作用就是将这些小网格中的数据进行聚合,以一种统计方式(如取最大值或平均值)来代表每个区域的主要信息。
2.3.1 池化层的工作原理
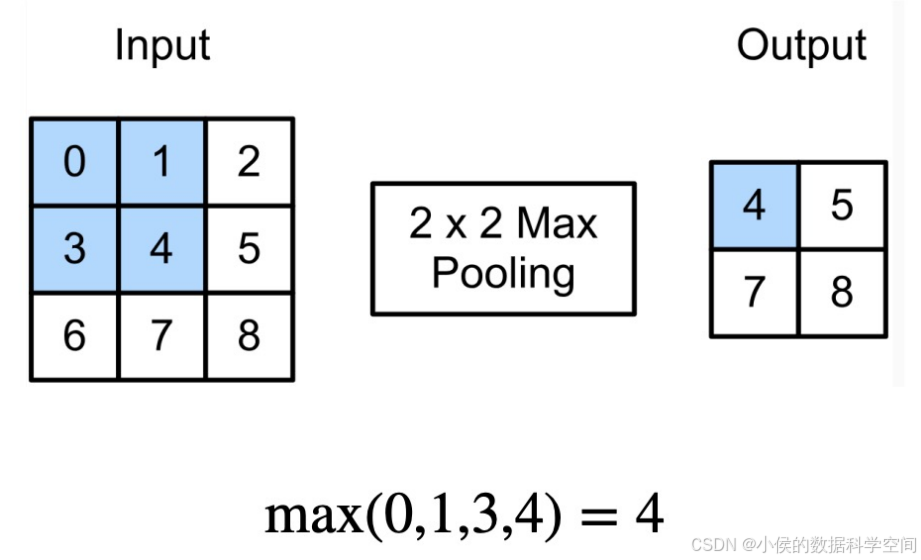
- 选择池化窗口:首先,我们选定一个池化窗口(例如2x2大小),这个窗口将在特征图上滑动。
- 应用池化函数:接着,我们对这个窗口内的数据应用池化函数。最常见的池化函数有两种:
- 最大池化(Max Pooling):选择窗口内的最大值,这个值代表了该区域最显著的特征。
- 平均池化(Average Pooling):计算窗口内所有值的平均数,以获取区域特征的平均表示。
- 滑动窗口:池化窗口在特征图上按照设定的步长滑动,并重复应用池化函数,直到覆盖整个特征图。
具体过程如图2.5所示:
2.3.2 池化层的优势
- 降维:池化层显著减少了数据的空间尺寸,从而减少了后续层的参数数量和计算量。
- 不变性:通过池化操作,模型对输入数据的平移、缩放和旋转等变换具有更好的不变性。
- 特征强化:池化层通过聚合操作强化了特征的表达,有助于保留最重要的信息。
3. 基于Pytorch的CNN实战代码
import torch
import torch.nn.functional as F
from torch.utils.data import Dataset, Subset
from torch import nn
from torch import optim
from sklearn.metrics import accuracy_score
from torchvision import datasets,transforms
#归一化
transform = transforms.Compose([
transforms.ToTensor(), # 将像素值转换到[0, 1]
transforms.Normalize((0.5,), (0.5,)) # 映射到-1到1的范围
])
# 下载训练集和测试集
trainset = datasets.MNIST(root='./data', train=True, download=True, transform=transform)
testset = datasets.MNIST(root='./data', train=False, download=True, transform=transform)
# 原数据太多,采用抽样数据
# train
sampled_train_indices = torch.randperm(len(trainset))[:7000] # 抽样索引
sampled_trainset = Subset(trainset, sampled_train_indices) # 使用Subset创建抽样的数据集
# test
sampled_test_indices = torch.randperm(len(testset))[:3000]
sampled_testset = Subset(testset, sampled_test_indices)
# 创建DataLoader来迭代数据集
trainloader = torch.utils.data.DataLoader(sampled_trainset, batch_size=128, shuffle=True)
testloader = torch.utils.data.DataLoader(sampled_testset, batch_size=3000, shuffle=False)
class cnn(nn.Module):
def __init__(self, input_channel):
super().__init__()
self.input_channel = input_channel
# nn.Conv2d(in_channels(输入通道数),out_channels(输出通道数),kernel_size(卷积核大小),stride(卷积核滑动步长))
self.conv1 = nn.Conv2d(in_channels=self.input_channel,out_channels=64,kernel_size=(4,4),stride=1)
# nn.MaxPool2d(kernel_size(池化核大小),stride(池化核滑动步长))
self.pool1 = nn.MaxPool2d(kernel_size=(2,2),stride=1)
self.conv2 = nn.Conv2d(in_channels=64,out_channels=32,kernel_size=(4,4),stride=1)
self.pool2 = nn.MaxPool2d(kernel_size=(2,2),stride=1)
self.relu = nn.ReLU()
self.fc = nn.Linear(32*20*20,10)
self.softmax = nn.Softmax(dim=1)
def forward(self,x):
# 一层卷积
x = self.conv1(x)
x = self.pool1(x)
x = self.relu(x)
# 二层卷积
x = self.conv2(x)
x = self.pool2(x)
x = self.relu(x)
# 全连接层
# x拉平
x = x.view(x.shape[0],-1)
x = self.fc(x)
x = self.softmax(x)
return x
def main(epoches):
# 如果是彩色图片input_channel=3
model = cnn(input_channel=1)
# 定义优化器
optimizer = optim.Adam(params=model.parameters(), lr=0.001)
# 定义损失函数
criterion = nn.MSELoss()
# 开始训练
model.train()
# epoch级遍历
for epoch in range(epoches):
# 储存一个epoch的损失
Loss = 0
# batch级遍历
for batch_x, batch_y in trainloader:
# 采用one-hot编码
batch_y = F.one_hot(batch_y,num_classes=10)
# cnn前向传播得到输出
outputs = model.forward(batch_x)
# 计算损失
loss = criterion(batch_y.to(torch.float), outputs)
Loss += loss
# 清空梯度
optimizer.zero_grad()
# 计算梯度
loss.backward()
# 用梯度更新参数
optimizer.step()
# 每个epoch完都打印损失值信息
if epoch % 1 == 0:
print('epoch:{}/{}, loss:{}'.format(epoch+1,epoches,Loss))
# 开始预测
model.eval()
# 禁用梯度
with torch.no_grad():
for tx,ty in testloader:
outputs = model.forward(x=tx)
pre_y = torch.argmax(outputs,dim=1)
acc =accuracy_score(pre_y,ty)
return acc
acc = main(epoches=5)
print(acc)

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









