






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
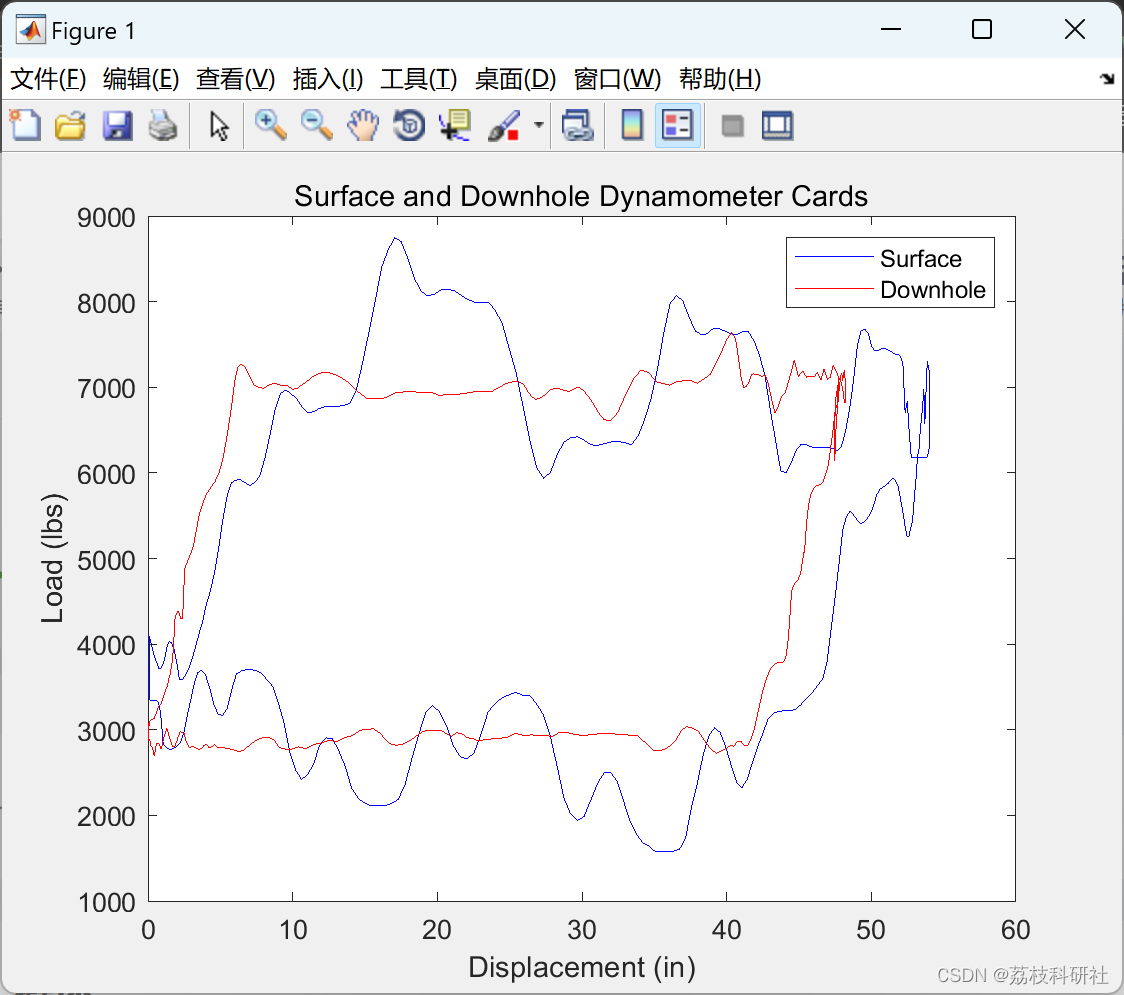
本文基于埃弗里特和詹宁斯方法的抽油杆泵有限差分波动方程诊断分析:抽油杆泵井下测功机卡的改进有限差分计算。
抽油杆泵的有限差分波动方程诊断分析研究
一、抽油杆泵系统基本原理与故障机理
抽油杆泵是一种通过地面驱动装置带动井下柱塞往复运动实现原油开采的机械系统。其核心组件包括电机、减速器、曲柄连杆机构、抽油杆柱及井下泵(管式泵或杆式泵)。在工作过程中,抽油杆柱承受交变载荷,导致疲劳断裂、偏磨、泵阀漏失等常见故障:
- 疲劳破坏:交变应力作用下,抽油杆易发生断脱或断裂,尤其在井斜或液体黏度较高时,偏磨现象加剧。
- 机械磨损:杆柱与油管内壁的摩擦、接箍磨损及砂卡/蜡卡问题显著降低泵效。
- 泵阀失效:固定阀与游动阀的密封性下降导致漏失,影响产液量。
二、有限差分法在波动方程建模中的理论基础
抽油杆柱的动力学行为可通过一维带阻尼的波动方程描述:

其中,u(x,t)为位移函数,a为声速,c为粘性阻尼系数。有限差分法(FDM)通过空间和时间离散化将偏微分方程转化为差分方程组:
- 离散化策略:采用中心差分近似二阶导数,显式或隐式格式处理时间步进。例如,显式格式的稳定性受Courant-Friedrichs-Lewy(CFL)条件约束。
- 数值频散控制:提高差分阶数或细化网格可减少因离散化引起的数值误差。
三、关键参数与边界条件
- 粘性阻尼系数(cc) :反映杆柱与流体间的能量耗散,直接影响泵功图形状。基于等摩擦功原理,通过实测光杆功率与水功率差异计算等效阻尼系数。
- 边界条件:
- 悬点运动规律:地面示功图提供位移和载荷的时变边界。
- 泵端动态响应:井下泵的液体负载与摩擦力构成动态边界条件。
四、诊断算法研究现状
- 经典模型改进:
- Gibbs模型:采用傅里叶级数求解波动方程,但未考虑多级杆柱的重力与接箍效应。
- 隐式差分与变步长技术:孙仁远等提出隐式差分处理均质段、变步长差分处理组合段,显著提升计算精度。
- 三维耦合分析:针对定向井,结合有限元法(FEM)与FDM,分析抽油杆、油管及环空流体的三维振动耦合,解决复杂井身结构的故障诊断难题。
- 机器学习融合:基于深度学习神经网络分析泵功图特征,实现故障模式自动识别(如气体影响、砂卡等)。
五、典型应用案例
- 油井工况诊断:通过新疆油田实例,利用VB程序模拟悬点载荷数据,结合FDM反演井下泵功图,成功识别杆柱断裂与泵漏失。
- 页岩气渗流模拟:结合格子玻尔兹曼法(LBM)与FDM,实现多尺度流动模拟,优化抽汲参数。
- 阻尼系数优化:中国船舶重工集团通过环空流动能耗与接箍局部损失计算,验证接箍阻尼占总能耗的19%,修正传统张琪公式的偏差。
六、挑战与未来方向
- 计算效率提升:高精度差分格式(如SBP算子)与并行计算技术结合,减少内存占用与计算时间。
- 多物理场耦合:综合考虑温度场、多相流及地质非均质性,构建更全面的动力学模型。
- 智能诊断系统:集成物联网(IoT)实时数据与AI算法,实现预测性维护与自适应控制。
总结
有限差分法为抽油杆泵系统的动态仿真与故障诊断提供了高效工具,其核心在于波动方程的精确离散化与关键参数(如阻尼系数)的优化。未来研究需进一步结合多学科方法,突破计算瓶颈,推动智能化诊断技术的发展。
📚2 运行结果
部分代码:
%% Lazo Principal en X (Profundidad)
for i = 3:M + 1
U(i,i-1:N-i+2) = A1*U(i-1,i:N-i+3) + A2*U(i-1,i-1:N-i+2) + A3*U(i-1,i-2:N-i+1) + A4*U(i-2,i-1:N-i+2);
%plot(-12*U(i,:), E*A/DX*(U(i,:) - U(i - 1,:)))
%pause
end
Fp = E*A/DX*(U(M+1,:) - U(M,:));
Xp = -12*(U(M+1,:) - max(U(M+1,:)));
% Xp = NaN(1,N);
% for j = M:N-M+1
% Xp(j) = -12*((1 + C*DT)*U(M, j + 1) - C*DT*U(M, j) + U(M, j - 1) - U(M - 1, j));
% end
%
% Fp = NaN(1,N);
% for j = M:N-M+1
% Fp(j) = (E*A/2/DX)*(3*U(M+1,j) - 4*U(M,j) + U(M-1,j));
% end
hold on
% plot(Up, Fpj,'r.')
plot(Xp, Fp,'r')
hold off
%% Lazo Principal en X (Profundidad)
for i = 3:M + 1
U(i,i-1:N-i+2) = A1*U(i-1,i:N-i+3) + A2*U(i-1,i-1:N-i+2) + A3*U(i-1,i-2:N-i+1) + A4*U(i-2,i-1:N-i+2);
%plot(-12*U(i,:), E*A/DX*(U(i,:) - U(i - 1,:)))
%pause
end
Fp = E*A/DX*(U(M+1,:) - U(M,:));
Xp = -12*(U(M+1,:) - max(U(M+1,:)));
% Xp = NaN(1,N);
% for j = M:N-M+1
% Xp(j) = -12*((1 + C*DT)*U(M, j + 1) - C*DT*U(M, j) + U(M, j - 1) - U(M - 1, j));
% end
%
% Fp = NaN(1,N);
% for j = M:N-M+1
% Fp(j) = (E*A/2/DX)*(3*U(M+1,j) - 4*U(M,j) + U(M-1,j));
% end
hold on
% plot(Up, Fpj,'r.')
plot(Xp, Fp,'r')
hold off
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]张成大.有杆泵抽油杆柱偏磨原因分析及对策[J].内蒙古石油化工,2016,42(09):73-74.
[2]Jose Ercolino (2023). Calculation of Downhole Dynamometer Cards for Sucker-Rod Pumps


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









