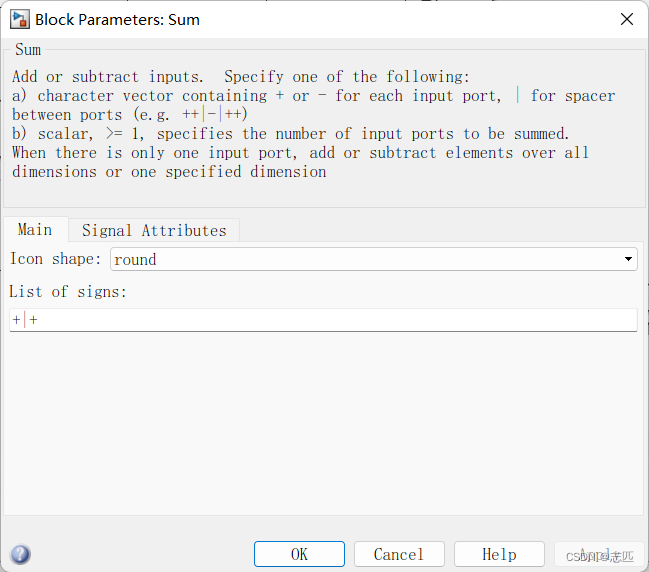
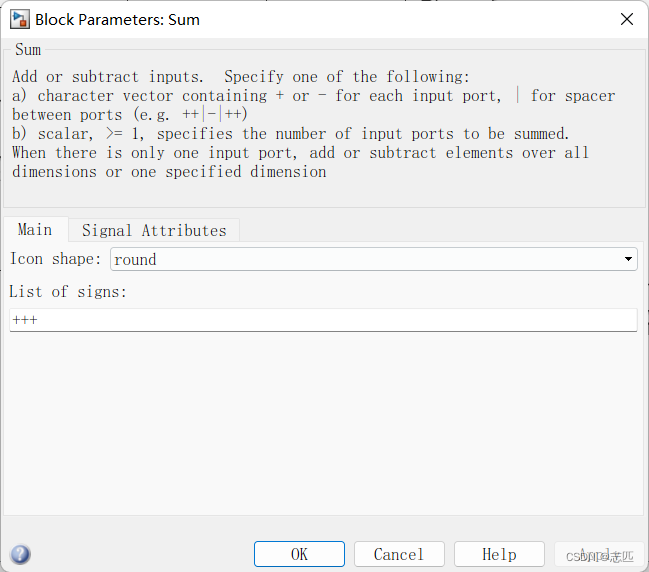
1. 模块的旋转 顺时针旋转:Ctrl+R 逆时针旋转:Ctrl+Shift+R 2.模块的引脚位置 1.第一种情况所对应的引脚设置 注意List of signs里面的 |++ 2.第二种情况所对应的引脚设置 注意List of signs里面的 ++| 3.第三种情况所对应的引脚设置 注意List of signs里面的 +|+ 4.第四种情况所对应的引脚设置 注意List of signs里面的 +++ 3.总结 模块的引脚:| 为引脚的空白位,从前往后为空白位 逆时针 旋转








 本文介绍了模块的旋转操作及不同引脚设置方法。通过Ctrl+R实现顺时针旋转,Ctrl+Shift+R实现逆时针旋转。并详细解释了四种不同的引脚配置方式及其在Listofsigns中的表示。
本文介绍了模块的旋转操作及不同引脚设置方法。通过Ctrl+R实现顺时针旋转,Ctrl+Shift+R实现逆时针旋转。并详细解释了四种不同的引脚配置方式及其在Listofsigns中的表示。























 4456
4456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






