







一.概念
(一)基本概念
- 定义:图G由顶点集V和边集E组成,记为G=(V,E),其中V(G)表示图G中顶点的有限非空集;E(G)表示图G中顶点之间的关系(边)集合。若V={V1,V2,……Vn},则用|V|表示图G中顶点的个数,也称图G的阶,E={(u,v)|u∈V,v∈V},用|E|表示图G中边的条数。
- 注意:线性表可以是空表,树可以是空树,但图不可以为空,即V一定是非空集。
- 无向图,有向图:有向图<u,v>,其中u表示弧尾,v表示弧头。
- 简单图:简单图:①不存在重复边,② 不存在顶点到自身的边。
- 多重图:图G中某两个结点之间的边数多于一条,又允许顶点通过同一条边和自己关联,则G为多重图。
- 度,入度,出度:① 无向图:在具有n个顶点,e条边的无向图中,全部顶点的度的和等于边数的2倍。②有向图:度之和入度+出度,在具有n个顶点,e条边的有向图中,入度+出度=e。
- 路径,简单路径,路径长度:① 在路径序列中,顶点不重复出现的路径称为简单路径。②路径长度:路径上边的数目。
- 回路,简单回路:除第一个顶点和最后一个顶点外,其余顶点不重复出现的回路称为简单回路。
- 点到点到距离:从顶点u出发到顶点v的最短路径若存在,则此路径的长度称为u到v的距离。若u到v根本不存在路径,则记该距离为无穷(∞)。
- 连通图,强连通图:①若图G中任意两个顶点都是连通的,则称图G为连通图,否则称为非连通图。对于n个顶点的无向图G,若G是连通图,则至少有n-1条边,若G是非连通图,则最多可能有C2n-1。②若图中任何一项顶点都是强连通的,则称为图为强连通图。对于n个顶点的有向图G,若G是强连通图,则最少为n条边(形成回路)。
- 子图、生成子图:若包含所有顶点的子图,就称为生成子图。并不是任意几个点,任意几条边都能构成子图。
- 连通分量:无向图中极大连通子图【子图必须连通,且包含尽可能多的顶点和边】称为连通分量。
- 强连通分量:有向图中有极大强连通子图【子图必须强连通,同时保留尽可能多的边】称为有向图的强连通分量。
- 生成树:连通图的生成树是包含图中全部顶点的一个极小连通子图【边尽可能的小,但要保持连通】。若哦图中顶点数是n,则它的生成树含有n-1条边,对于生成树而言,若砍去一条边,则会变成非连通图,若加上一条边则会形成一个回路。
- 生成森林:在非连通图中,连通分量的生成树构成了非连通图的生成森林。
- 边的权,带权图(网)
- 无向完全图:无向图中任意两个顶点之间都存在边,若无向图的顶点数|V|=n,则|E|∈[0,C2n]=[0,n(n-1)/2]。
- 有向完全图:有向图中任意两个顶点之间都存在方向相反的两条弧。若有向图的顶点数|V|=n,则|E|∈[0,2C2n]=[0,n(n-1)]。
- 稀疏图,稠密图:一般来说|E|<|V|log|V|时,可以视G为稀疏图。
- 树:不存在回路,且连通的无向图,n个顶点的树,必有n-1条边。
- 有向树:一个顶点的入度为0,其余顶点的入度均有1的有向图,称为有向树。
- n个顶点的图,若|E|>n-1,则一定有回路。
(二)常考考点
- 对于n个顶点的无向图G,
① 所有顶点的度之和=2|E|。
②若G为连通图,则至少有n-1条边,若|E|>n-1,则一定有回路。
③若G有非连通图,则最多可能有C2n-1条边。
④无向完全图共有C2n条边。 - 对于n个顶点的有向图G,
①所有顶点的出度之和=入度之和=|E|。
②所有顶点的度之和=2|E|。
③若G是强连通图,则最少有n条边(形成回路)。
③有向完全图共有2C2n条边。
二.图的储存结构(邻接矩阵法)
1.数组表示法
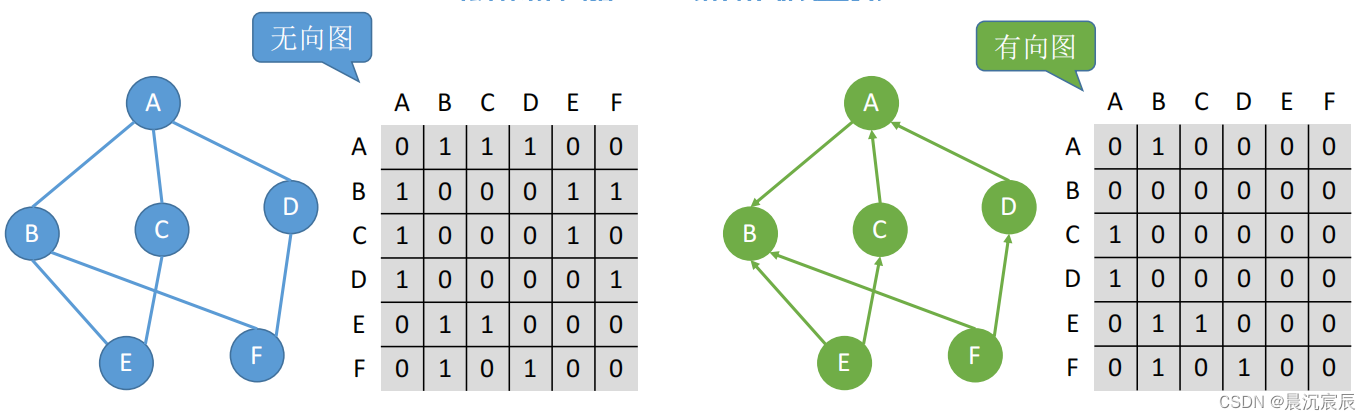
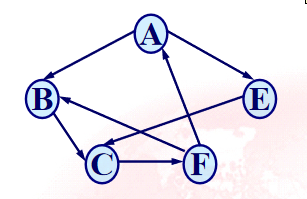
(1) 有向图,无向图的邻接矩阵
(2) 网的邻接矩阵定义为:
a[i][j]:
(1) Wij 若<vi,vj> 或<vi,vj >∈VR(2)∞ 反之
(3)说明:
① 对于无向图,顶点vi的度是邻接矩阵中第i行(或第i列)的元素之和, TD(vi)= ∑ a[i][j]。
② 对于有向图,顶点VI的出度OD(vi)是邻接矩阵中第i行的元素之和,顶点vi的出度ID(vi)是邻接矩阵中第j列)的元素之和。
③ 邻接矩阵法求顶点的度。入度。出度的时间复杂度为O(|V|)。
④ A2 [1][2]:第一个顶点到第二个顶点路径为2的路径有多少条。
2. 定义邻接矩阵的结构
#define INFINITY INT_MAX
#define MAX_VERTEXT_NUM 20
typedef enum{DG,DN,AG,AN}GraphKind;
typedef struct ArcCell{
VRType adj;//对无向图,用0,1表示是否相邻,对于带权图,为权值
InfoType *info;//该弧相关信息的指针
}RrcCell,AdjMatrix[MAX_VERTEXT_NUM][MAX_VERTEXT_NUM];//邻接矩阵
3. 定义图的结构
(1)代码:
//定义图的结构
typedef struct {
VertextType exs[MAX_VERTEXT_NUM]; //顶点
AdjMatrix arcs[MAX_VERTEXT_NUM][MAX_VERTEXT_NUM]; //边的邻接矩阵
int vexnum,arcnum; //个数
GraphKind kind;//有向图?无向图?
}MGraph;
(3)注意:
① 邻接矩阵法的空间复杂度O(|V|2),之和顶点数有关
② 更适合存储稠密图
③对于无向图而言,因为是对称矩阵,可以进行压缩存储
(4)压缩存储
- 策略:只存储主对角线+下三角区
- 按行优先原则将各元素存入一堆数组中
| B[0] | B[1] | B[2] | B[3] | B[4] | B[n(n+1)/2-1] |
|---|---|---|---|---|---|
| a1,1 | a2,1 | a2,2 | a3,1 | a3,2 | an,n |
- aij->B[k]
- ai,j = aj,i(由于对称性质)
- k=(i(i-1))/2+j-1 [i≥j,属于下三角区和主对角线元素]
- k=(j(j-1))/2+i-1 [i<j,属于上三角区]
4. 构造图G
status CreateGraph(MGraph &G)
{
scanf(&G.kind)
{
case DG:return CreateDG(G);
case DN:return CreateDN(G);
case UDG:return CreateUDG(G);
case UDN:return CreateDGN(G);
default:return ERROR;
}
}
//用无向图为例
status CreateUDN(MGraph &G)
{
scanf(&G.arcnum,&G.vexnum,&IncInfo);//输入点数和边数
//给顶点进行数字化编号
for(i=0;i<G.vexnum;i++)
{ scanf(&G.exs[i]);//定义顶点数组(如果顶点本身就是1~n的数字无需这一步)
}
//初始化邻接矩阵
for(i=0;i<G.vexnum;i++)
{
for(j=0;j<G.vexnum;j++)
{
G.arcs[i][j]={ININITY,NULL};
}
}
//通过边数进行遍历
for(k=0;k<G.arcnum;K++)
{
scanf(&V1,&V2,&W);//输入邻接的连个顶点
i=locatteVex(G,V1);j=locateVex(G,V2);//查找V1,V2的位置
G.arcs[i][j].adj=w;//给邻接矩阵赋值
if(IncInfo)
{
INPUT(*G.arcs[i][j].info);
}
G.arcs[j][i]=G.arcs[i][j];//由于是无向图,对称
}
return ok;
}
5. 特点
优点:
- 无向图邻接矩阵是对称矩阵,同一条边表示了两次
- 顶点v的度:等于二维数组对应行(或列)中1的个数
- 判断两顶点v、u是否为邻接点:只需判二维数组对应分量是否为1
- 在图中增加、删除边:只需对二维数组对应分量赋值1或清0
- 占用存储空间只与它的顶点数有关,与边数无关;适用于边稠密的图
- 对有向图的数组表示法可做类似的讨论
缺点:
- 不便于删除和增加顶点
- 不便于统计边的数目,需要扫描邻接矩阵所有元素才能统计完毕,时间复杂度为O(n2 )
- 空间复杂度高,对于有向图,n个顶点需要n2 个单元存储边,对于无向图,n(n-1)/2个单元,空间复杂度为O(n2 )
三. 储存结构(邻接表表示法)
1. 储存方式
【1】无向图
- 把从一个顶点出发的边链接在一个单链表(又名边链表)中把从一个顶点出发的边链接在一个单链表(又名边链表)中
- 所有边链表的表头指针放在一个顺序表中

- 对于无向图而言,数据会有存在冗余,边结点的数量为2|E|,整体空间复杂度为O(|V|+2|E|)
【2】有向图
- 实例

- 注意,在有向图的邻接表中不易找到指向该顶点的弧。
- 边结点的数量为|E|,整体空间复杂度为O(|V|+|E|)
2. 结构
【1】顶点的结点结构
———————
| data | firstarc |
———————
- data数据域:储存顶点vi
- firstarc链域:指向链表中第一个结点
【2】弧的结点结构
——————————
| adjvex | info | nextarc |
——————————
- adjvex邻接点域:与顶点vi邻接的点在图中的位置
- info数据域:储存和边相关的信息,如权值
- nextarc链域:与顶点vi的点在图中的位置
3.图的邻接表存储表示(算法)
#define MAX_VERTEXT_NUM 20
//建立边结点
typedef struct ArcNode {
int adjvex; // 该弧所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条弧
InfoType *info; // 该弧相关信息(可选)
}ArcNode;
// 顶点结点
typedef struct VNode{
VertexType data; // 顶点信息
ArcNode *firstarc; // 指向第一条依附该顶点的弧
}VNode,AdjList[MAX_VERTEXT_NUM];
//邻接表
typedef struct {
Adjlist vertices;
int vexnum,arcnum;
int kind;
}ALGraph;
//建立邻接表算法
//初始化一个结点总数为num的图,k为图的类型,num为结点总数
void InitG(ALGraph G,enum GraphKind k,int num)
{
G.kind=k;
G.vexnum=num;
G.vertices=new VNode[vexnum];
for(int i=0;i<G.vexnum;i++)
{G.vertices[i].Firstarc=NULL;
cin>>G.vertics[i].data;
}
}
//有向图(网)增加弧的算法,将弧(from,to,weight)加入图
void InsertArc(ALGragh G,int from,int to,int weight)
{
ArcNode *s=new ArcNode;
s->weight=weight;
s->adjvex=to;
s->nextarc=G.vertices[from].firstarc;//插到链表vertices[from]的头
G.vertices[from].firstarc=s;
}
4. 结论
(1)在邻接表中,同一条边对应两个结点。
(2)无向图中顶点v的度:等于v 对应的链表的长度;但是,在有向图中,要求顶点A的的入度,则需要遍历所有的顶点连接的链表,判断有几个存在顶点A;求出度,则是A顶点链表有几个点。
(3)判定两顶点v,w是否邻接:要看v对应的链表中有无对应的结点w(相反判断也行);
(4)对于一个图,给定的邻接表是并不唯一的(区分与邻接矩阵)
(5)增减边:要在两个单链表插入、删除结点;
(6)占用存储空间与顶点数、边数均有关;适用于边稀疏的图
四.拓展存储结构(十字链表,邻接多重表)
【1】十字链表(存储有向图)
- 实例
- 空间复杂度:O(|V|+|E|)
【2】邻接多重表(存储无向图)
- 实例
- 解决无向图冗余信息的问题,空间大
- 删除边,删除结点操作更简单
- 空间复杂度:O(|V|+|E|)
五. 图的基本操作
【1】Adjacent(G,x,y)边的存在
- 思路:
①无向图:邻接矩阵,判断aij是否为1,邻接表,i点的邻接表是否有j点;
②有向图类似 - 时间复杂度
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(1) | O(1)~O(V) |
| 有向图 | O(1) | O(1)~O(V) |
【2】Neighbors(G,x):列出图G中与结点x邻接的边
- 思路:
①无向图:邻接矩阵,罗列出x点的行为1的所有点,邻接表,遍历x的链表的所有结点;
②有向图:邻接矩阵,出边遍历行,入边遍历列,邻接表,(出边)遍历x的链表,(入边)遍历所有的结点查看哪个结点值是x。 - 时间复杂度
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(V) | O(1)~O(V) |
| 有向图 | O(V) | 出边:O(1)~O(V) 入边:O(E) |
【3】InsertVertex(G,x):在图G中插入顶点x
- 思路:
① 无向图:邻接矩阵,给矩阵增加一个x行增加一个x列;邻接表,给表的最后一行增加x项,不接任何一个结点,指向NULL。
② 有向图:类似 - 时间复杂度
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(1) | O(1) |
| 有向图 | O(1) | O(1) |
【4】DeleteVertex(G,x):从图G中删除顶点x
- 思路:
① 无向图:邻接矩阵,将x的所有行列全部清空为-1,在顶点集中x的值表示为-1或false;邻接表,将所有与x有关的信息删除,需要遍历所有的结点。
② 有向图:邻接矩阵,与无向图类似,邻接表,删出边需要将x的链表都删除,删入边,需要遍历所有的结点。 - 时间复杂度
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(V) | O(1)~O(E) |
| 有向图 | O(V) | 删出边:O(1)~O(V) 删入边:O(E) |
【5】AddEdge(G,x,y):若无向边(x,y)或有向边<x,y>不存在,则向图G中添加该边。
- 思路:
① 无向图,邻接矩阵,将axy的值由0改为1,邻接表,将x的链表后或前加上结点y,最好使用头插法。
② 有向图,类似。
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(1) | O(1) |
| 有向图 | O(1) | O(1)~O(V) |
【6】FirstNeighbor(G,x):求图G中顶点的第一个邻接点
- 思路
① 无向图:邻接矩阵,扫描x的一行第一个为1的元素,可能第一个就是也可能到最后一个都没有;邻接表,查看x链表的第一个结点。
② 有向图:邻接矩阵,找x有关的行列,也就是出边入边的第一个邻接点,邻接表,出边寻找简单,但是入边需要遍历所有的边。 - 时间复杂度
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(1)~O(V) | O(1) |
| 有向图 | O(1)~O(V) | 找出边连接点:O(1) 找入边邻接点:O(1)~O(E) |
【7】NextNeighbor(G,x,y):假设图G中顶点y是顶点x的一个邻接点,返回除y之外顶点x的下一个邻接点的顶点号,若y是x的最后一个邻接点,则返回-1
| 时间复杂度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 无向图 | O(1)~O(V) | O(1) |
| 有向图 | O(1) | O(1)~O(V) |
重点是 6、7
六.图的遍历
1. 图遍历的概述
1、定义——从某顶点出发,沿着一些边访问连通图中所有顶点,且使每个顶点仅访问一次的运算。
2、为避免重复访问,可设置辅助数组Visited[ ],各分量初值为0,当顶点被访问,对应分量被置为1。
3、方法——深度优先(depth first search DFS)
广度优先(breadth first search BFS)
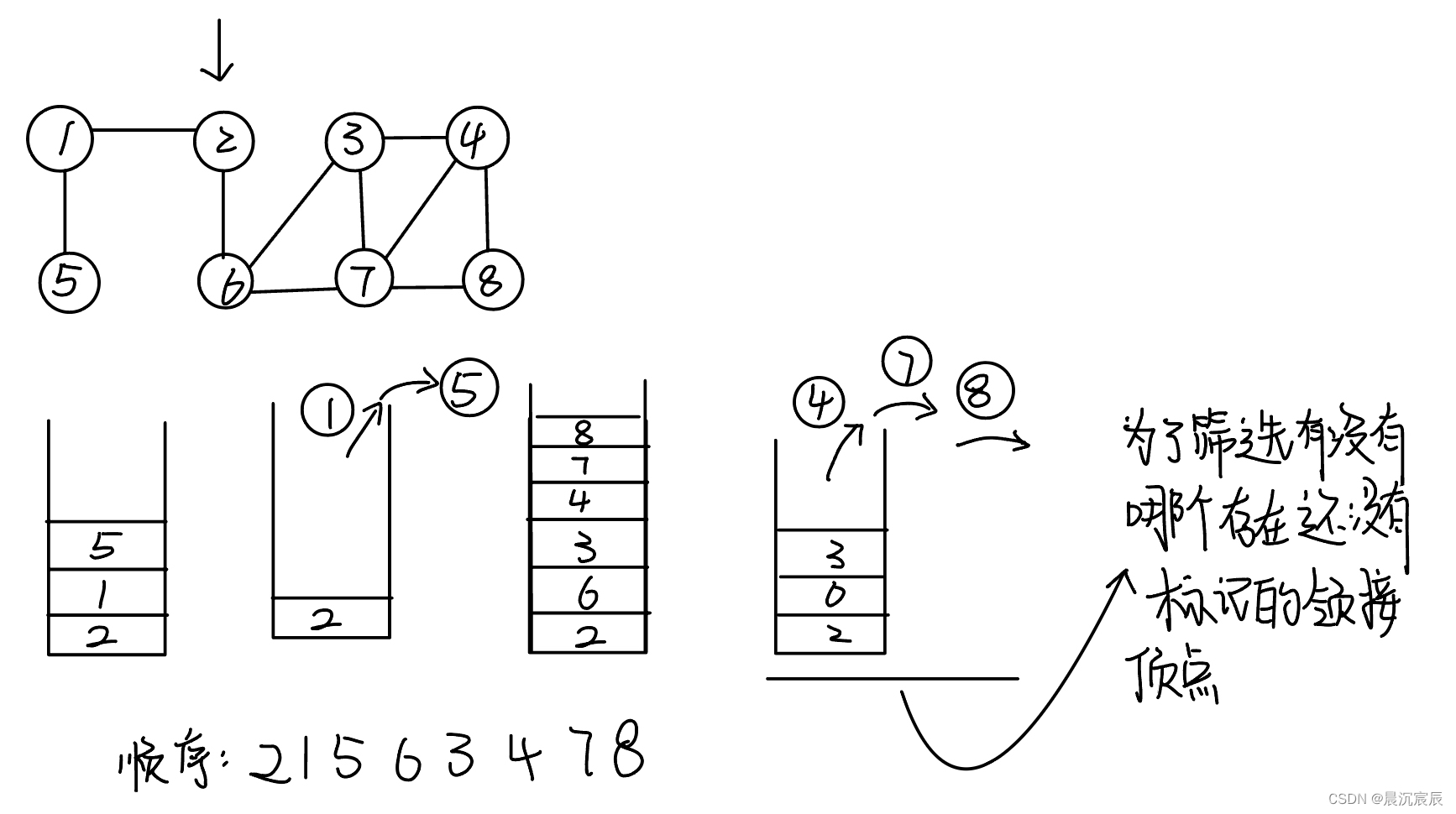
2.深度优先遍历(栈)
(1)算法描述
从图中某个顶点V0 出发,访问此顶点,然后依次从V0的各个未被访问的邻接点出发深度优先搜索遍历图,直至图中所有和V0有路径相通的顶点都被访问到。
- 从深度优先搜索遍历连通图的过程类似于树的先根遍历;
- 如何判别V的邻接点是否被访问?
解决的办法是:为每个顶点设立一个 “访问标志数组bool visited[vexnum]”。
(2)算法实现
- 邻接矩阵
int visited[MAX];//设置一个数组,判断是否遍历过,false/1为遍历过
void DFGTraverse(Graph G,int v)
{
for(v=0;v<G.vexnum;v++)
visited[v]=0;//初始化判断数组
for(v=0;v<G.vexnum;v++)
{
if(!visited[v])//如果没有遍历过
DFS(G,V);//进行遍历
}
}
void DFS(Graph G,int v)//进行递归遍历
{
visited[v]=1;printf(v);//改变判断数组,输出点
for(w=FirstVex(G,v);w!=0;w=NextVex(G,v))//从每一行第一个邻接矩阵值为1的,跳转到下一个值为1的
{
if(!visited[w])
DFS(G,v);
}
}
int FirstVex(Graph G,int v)//判断第一个不是0的
{
int i;
for(i=0;i<G.vexnum;i++)
{
if(G.arcs[v][i]==1&&visited[i]==False)
return i;
}
return -1;
}
void NextVex(Graph G,int v)//判断下一个不是0的
{
int i;
for(i=w;i<G.vexnum;i++)
{
if(G.arcs[v][i]==1&&visited[i]!=False)
return i;
}
return -1;
}
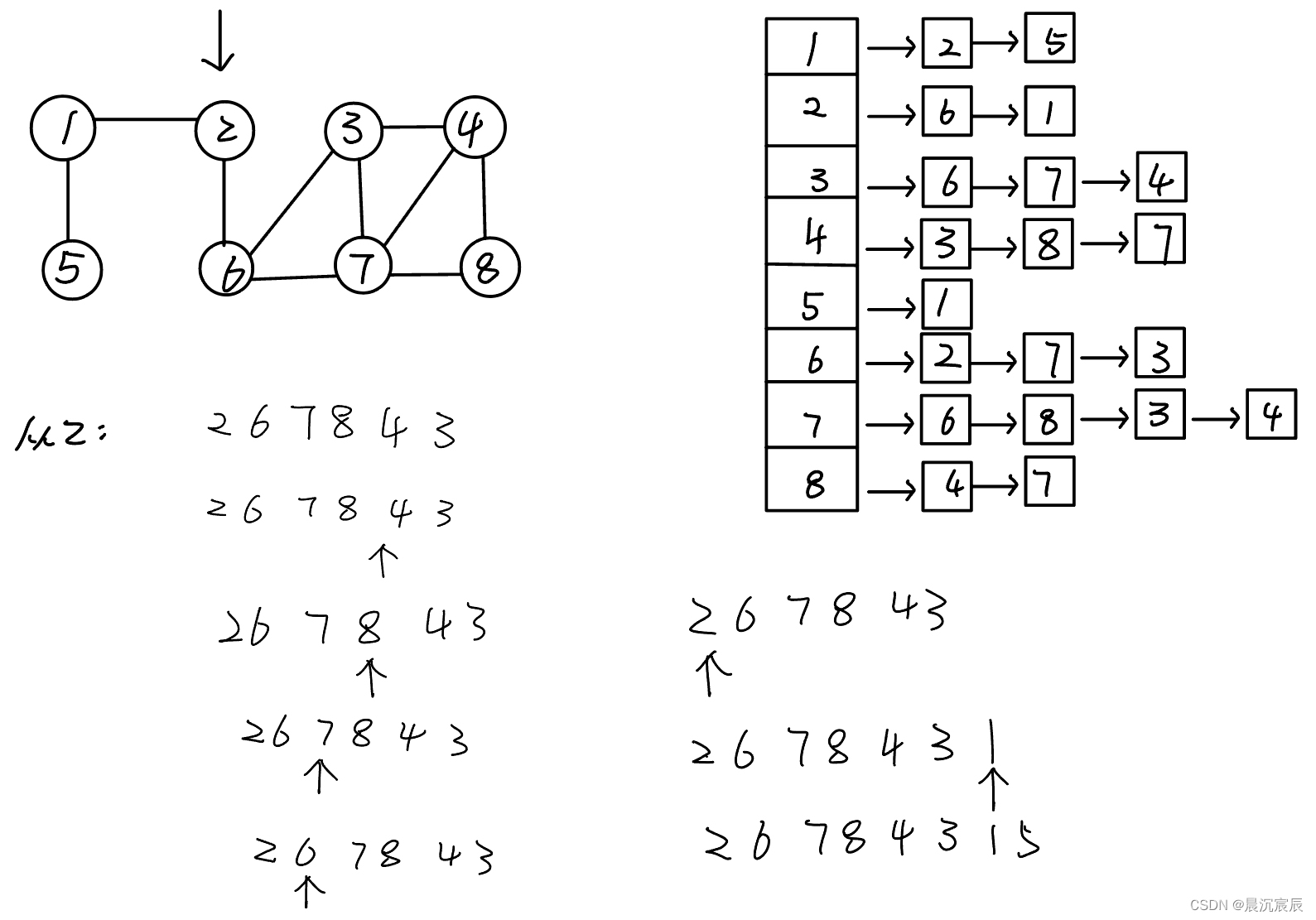
2.邻接表
void DFS(Graph G,int v)
{
cout<<G.vertices[v].data<<" ";
visited[v]=true;
ArcNode *p=G.vertices[v].firstarc;
while(p!=NULL)
{
int w=p->adjvex;
if(!visited[w])
DFS(G,w);
p=p->nextarc;a
}
}
(3)时间/空间复杂度
- 空间复杂度:邻接矩阵,最坏情况O(|V|),最好情况O(1)。
- 时间复杂度:
T(V)=o(|V|2) 邻接矩阵
T(V)=O(|E|+n) 邻接表
3. 广度优先遍历
(1)算法描述
- 从图中某个顶点V0出发,并在访问此顶点之后依次访问V0的所有未被访问过的邻接点,之后按这些顶点被访问的先后次序依次访问它们的邻接点,直至图中所有和V0有路径相通的顶点都被访问到。
- 对于非连通图,可能此时尚有顶点未被访问,则另选图中一个未被访问的顶点作起始点,重复上述过程,直至图中所有顶点都被访问到为止。
- 因此关键在于:①找到与一个顶点相邻的所有结点;② 标记哪些顶点被访问过;③ 需要一个辅助队列存储。
(2)例子


(3)算法

(4)代码
采用邻接表存储实现无向图的广度优先遍历
//visited是访问标记数组
//处理非连通图的情况
bool BFSTraverse(Graph G){
for(int i=0;i<G.vexnum;++i)
visited[i] = false;
InitQueue(Q);
for(int i=0;i<G.vexnum;++i){
if(!visited[i])
BFS(G,i);
}
}
void BFS(Graph G,int v){
visit(v); //访问v顶点
visited[v] = True; //修改该顶点对应数组的值为true
EnQueue(Q,v); //入队
while(!isEmpty(Q)){ //不空还有未遍历到的节点
DeQueue(Q,v); //出队v
for(w = FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w)) //找到所有符合条件的邻接节点
if(!visited[w]){ //w是否被访问
visit[w]; //访问
visited[w] = true; //修改该顶点对应数组的值为true
EnQueue(Q,w); //入队
}
}
}
bool BFSTraverse(Graph G,int v){
for(int i=0;i<G.vexnum;++i)
visited[i] = false;
InitQueue(Q);
for(int i=0;i<G.vexnum;++i){
if(!visited[i])
visit(v); //访问v顶点
visited[v] = True; //修改该顶点对应数组的值为true
EnQueue(Q,v); //入队
while(!isEmpty(Q)){ //不空还有未遍历到的节点
DeQueue(Q,v); //出队v
for(w = FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w)) //找到所有符合条件的邻接节点
if(!visited[w]){ //w是否被访问
visit[w]; //访问
visited[w] = true; //修改该顶点对应数组的值为true
EnQueue(Q,w); //入队
}
}
}
}
(5)分析
① 如果使用邻接表,则从同一个顶点广度优先遍历序列会随着链接表不同而不同,但是由于邻接矩阵是唯一的,所以从同一个广度优先遍历得到的顺序是唯一的。
② 对于无向图,调用BFS函数的次数=连通分量数
③ 空间复杂度:O(|V|)
④ 时间复杂度:
a.使用邻接矩阵存储的图:访问|V|个顶点的需要O(|V|)的时间,查找每个顶点的邻接点都需要O(|V|)的时间,而总共有|V|个顶点,时间复杂度=O(|V|2)+o(|V|)=O(|V|2)。
b.使用邻接表的图:访问|V|个顶点的需要O(|V|)的时间,查找各个顶点的邻接点都需要O(|E|)的时间,时间复杂度=O(|V|)+o(|E|)。
(6)广度优先生成树(森林)
① 通过广度优先遍历可以的得到一棵遍历树
② 由于邻接表不唯一,则树不唯一;由于邻接矩阵唯一,则树唯一。
伞 遍历非连通图,可以得到广度优先生成森林。
4. 规律
(1)对于无向图而言,调用BFS/DFS的次数=连通分量数。
(2)对于有向图而言,若起始顶点到其他顶点都有路径,则只需调用一次BFS/DFS函数。对于强连通图,从任一结点出发只需调用1次BFS/DFS函数。















 2134
2134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









