







首先去NXP github 上下载一个官方开发板使用的linux
github链接:nxp-imx/linux-imx: i.MX Linux kernel
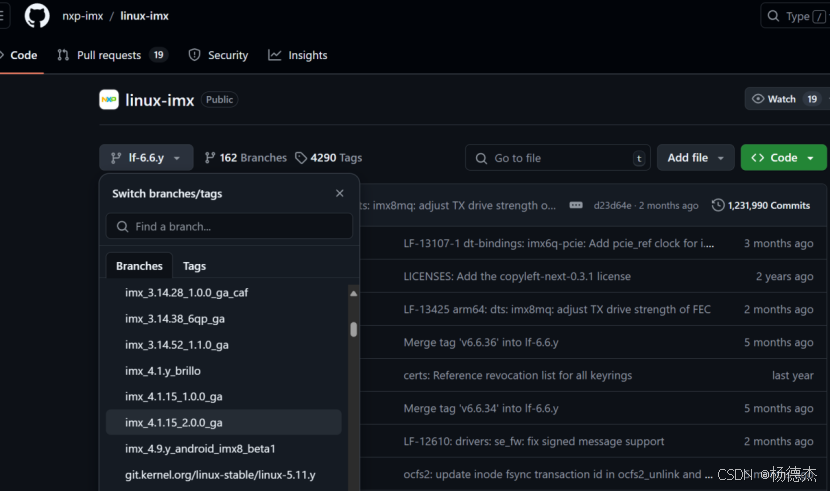
注意:使用的Linux版本最好和U-boot的版本保持一致,我U-boot使用的版本是uboot-imx-rel_imx_4.1.15_2.1.0,因此这里选择4.1.1版本。
下载后放到ubuntu虚拟机(使用的是Ubuntu2024-LTS)中解压
交叉编译器也是编译U-boot时用到的gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf
开发板使用的是正点原子的ALPHA开发板(V2.4后)
前提:U-Boot已经移植成功!!!
一、NXP官方Linux编译
在解压的文件夹下创建sh编译脚本用来一步到位编译与配置
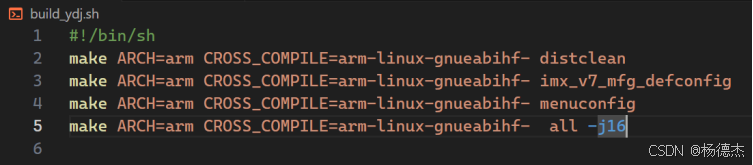
也可以直接修改顶层Makefile脚本中ARCH和CROSS_COMPILE变量
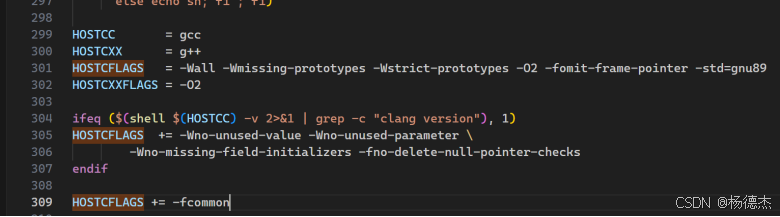
在Ubuntu2024下初次编译NXP官方Linux时候出现以下错误:
multiple definition of “yylloc”的错误

在网上找到解决方法:解决Linux下交叉编译U-Boot源码时报‘multiple definition of `yylloc‘‘的错误-CSDN博客
在顶层文件Makefile中添加HOSTCFLAGS += -fcommon如下图所示:
然后重新执行交叉编译脚本编译输出如下:
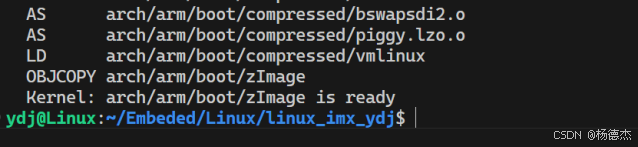
看到生成了zImage镜像说明编译成功!!!
二、添加自己的开发板/嵌入式系统
- 添加config文件:进入/arch/arm/configs/ 目录下复制一份imx_v7_mfg_defconfig文件并重命名为imx_ydj_mfg_emmc_defconfig
- 添加dst文件:进入/arch/arm/boot/dts目录下复制一份imx6ull-14x14-evk.dts文件并重命名为imx6ull-ydj-emmc.dts。
- 修改该目录下的Makefile文件添加imx6ull-ydj-emmc.dtb \注意斜杠后面不能有空格,否则编译会报错
- 将imx6ull-ydj-emmc.dts文件中的usdhc2设备树节点替换为imx6ull-14x14-evk-emmc.dts中的usdhc2设备树节点,否则启动linux后会识别不出emmc
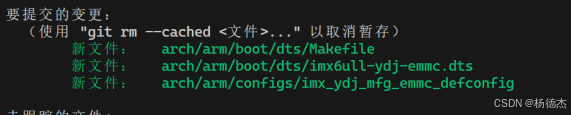
我这里将这修改的三个文件添加到了git版本管理,以免后续改错导致从头开始
三、相关驱动修改
- 修改 EMMC 驱动
Linux 内核驱动里面 EMMC 默认是 4 线模式的,为了提高速度,修改为8线模式,在上一节复制imx6ull-14x14-evk.dts文件的时候已经修改过了。
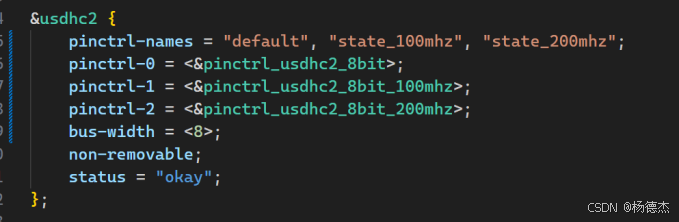
其次,由于正点原子EMMC使用了3.3V供电, 需要在usdhc2 设备树节点中添加“no-1-8-v”选项,也就是关闭 1.8V 这个功能选项。防止内核在运行的时候用 1.8V 去驱动 EMMC,导致 EMMC 驱动出现问题。
- 网络驱动修改
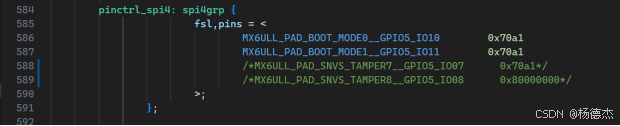
修改 SR8201F 的复位以及网络时钟引脚驱动:
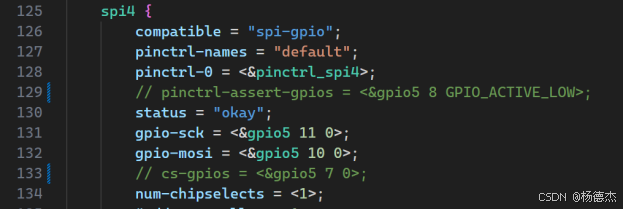
由于正点原子使用了以下两个引脚作为网络驱动的复位,因此在imx6ull-ydj-emmc.dts文件中删除其作为SPI部分的内容,否则会导致使用冲突问题
然后在iomuxc_snvs节点下添加网络复位引脚节点信息
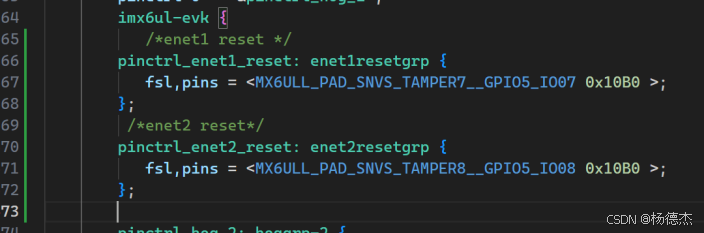
在enet1grp和enet2grp节点中添加如下ENET1 和 ENET2 的网络时钟引脚配置信息
![]()
![]()
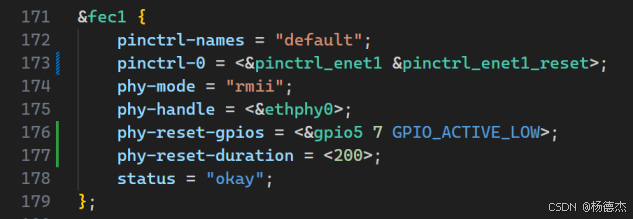
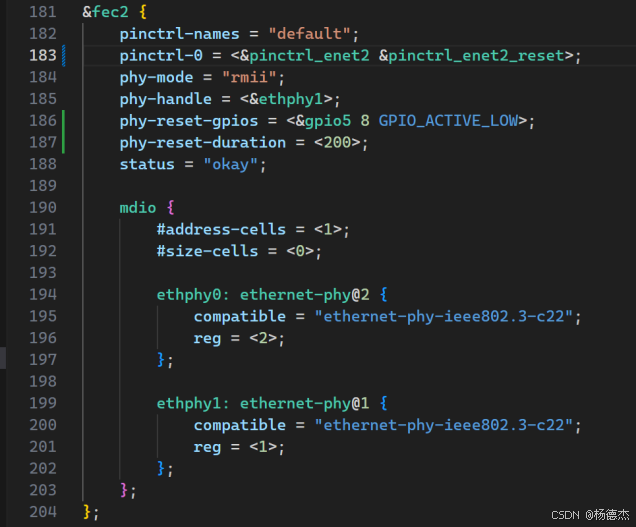
修改 fec1 和 fec2 节点的 pinctrl-0 属性如下:
在drivers/net/ethernet/freescale/fec_main.c文件中fec_reset_phy函数最后添加一个延时,保证至少延时150ms才能继续操作PHY

四、编译并使用Uboot启动Linux
我这里使用的是SD卡启动U-boot,然后通过U-boot的TFTP网络服务从Ubuntu主机中将Linux镜像zImage和dtb设备树文件拷贝到开发板DDR指定位置处。
将上述修改的linux源码编译一下,将生成的zImage和dtb文件复制到tftp服务的文件夹下,确认Uboot中bootcmd 变量为 tftp 80800000 zImage; tftp 83000000 imx6ull-ydj-emmc.dtb; bootz 80800000 - 83000000,bootargs=console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw。
root这个变量可以暂时不用管,因为还没有移植rootfs根文件系统。我这里由于之前已经在emmc中下载过根文件系统了,所以将root设置成/dev/mmcblk1p2,意思是让linux去emmc(mmcblk0是SD卡,mmcblk1是emmc)中的第二个分区去挂载根文件系统。
使用bootz命令启动后等待U-boot的tftp从Ubuntu主机中下载zImage镜像和设备树后就会成功启动Linux。但是现在还不能使用命令,因为根文件系统还没移植。
如果你SD卡或者emmc中分区2中有根文件系统,并且设置好root挂载后,通过命令
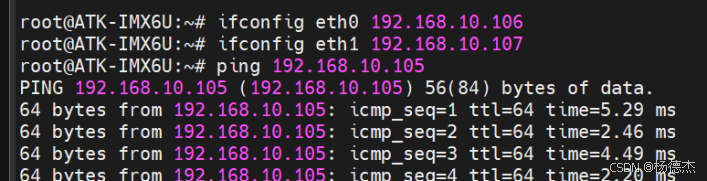
ifconfig eth0 up /ifconfig eth1 up打开两个网卡
然后ifconfig eth0 192.168.10.106设置板子的ip地址,ping一下Ubuntu主机成功说明修改的网络驱动是没有问题的。
参考
正点原子开发板教程资料

















 2099
2099

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









