







协方差矩阵
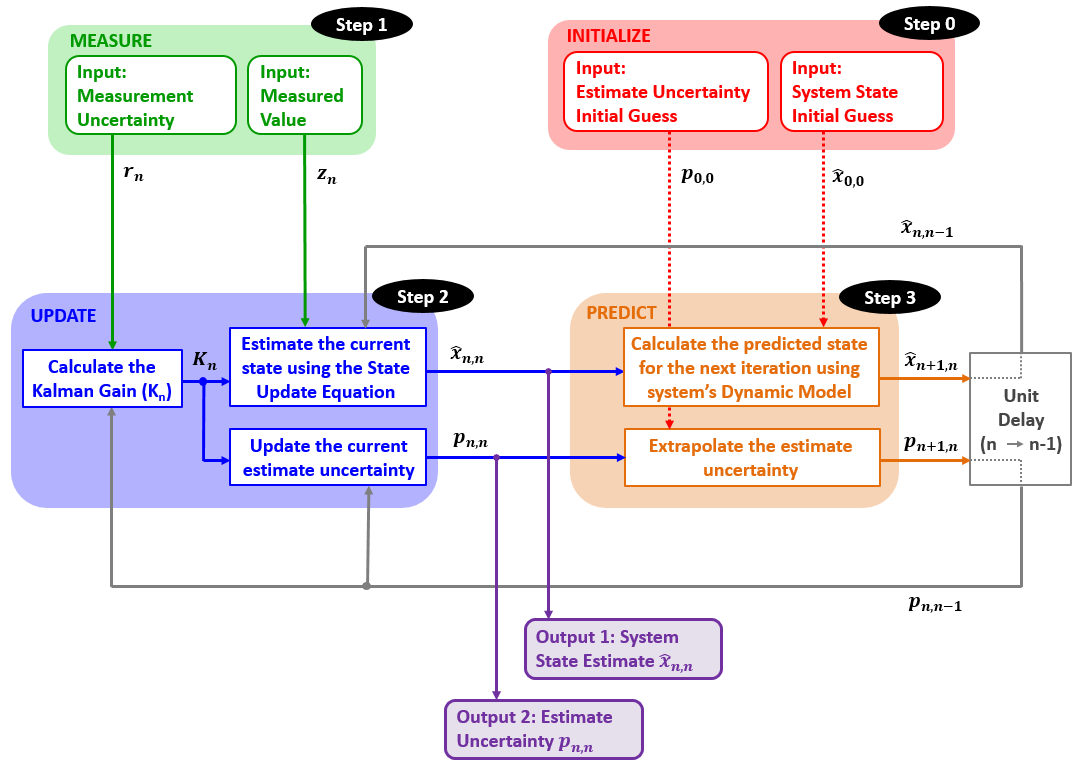
Kalman Filter Information Flow

状态更新方程

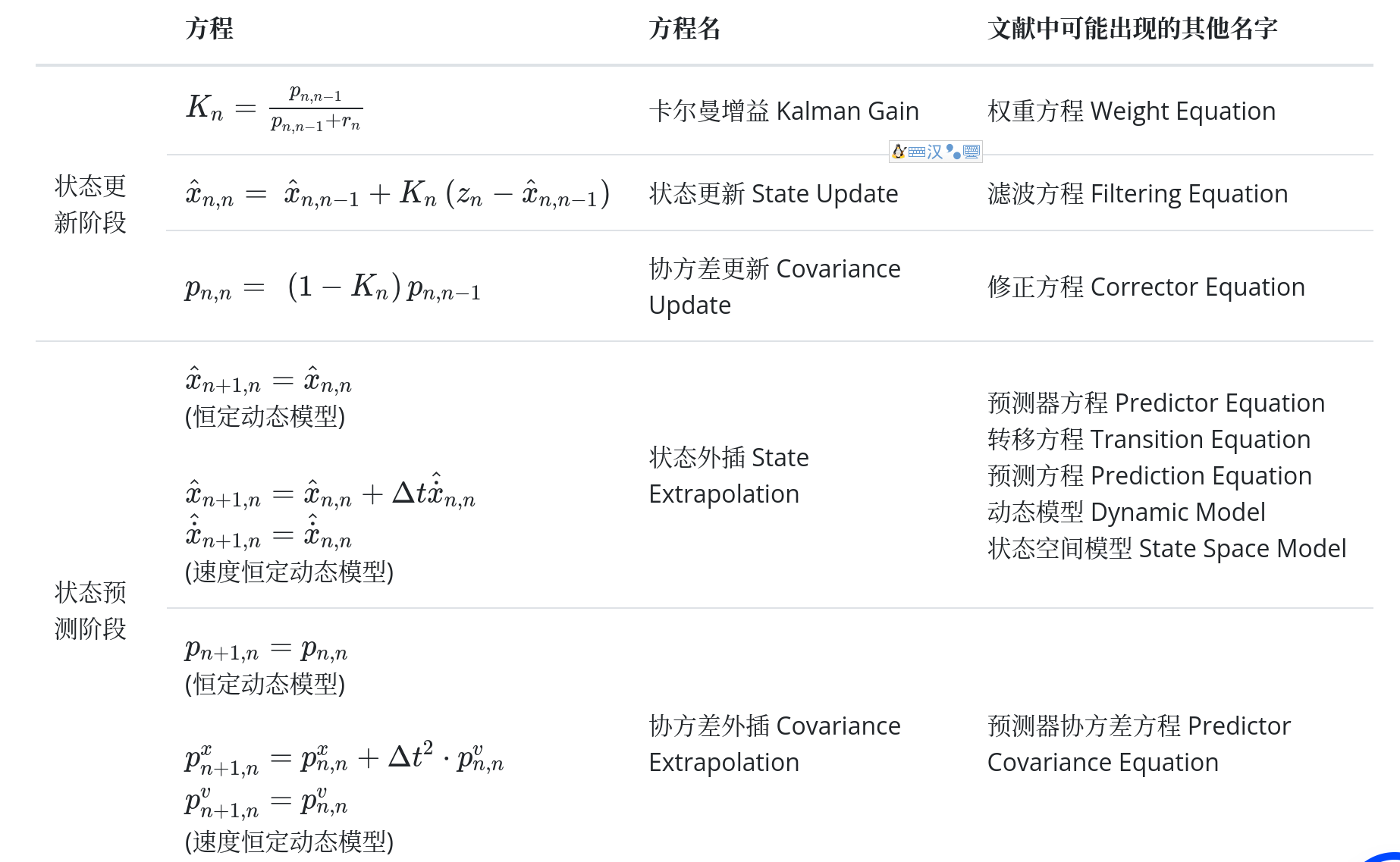
五个卡尔曼滤波方程总结
卡尔曼滤波的详细框图描述
过程噪声
真实世界中,系统动力模型总是有不确定性的。比如我们想测量一个电阻的阻值,我们假设它是不变的,即阻值不随测量过程而改变。但实际上阻值会随着环境温度的改变而轻微改变。再比如用雷达追踪弹道导弹时,导弹动态模型的不确定性会包含一些随机的加减速。对于飞行器之类的目标,模型不确定性更大,因为飞行员随时可能进行机动。
另一方面,当我们用GPS接收机计算一个固定物体的位置时,由于固定物体不会动所以动态模型不确定性为0. 动态模型的不确定性称为 过程噪声。一些文献中也叫模型噪声、驱动噪声、动态噪声或系统噪声。过程噪声也会带来估计误差。
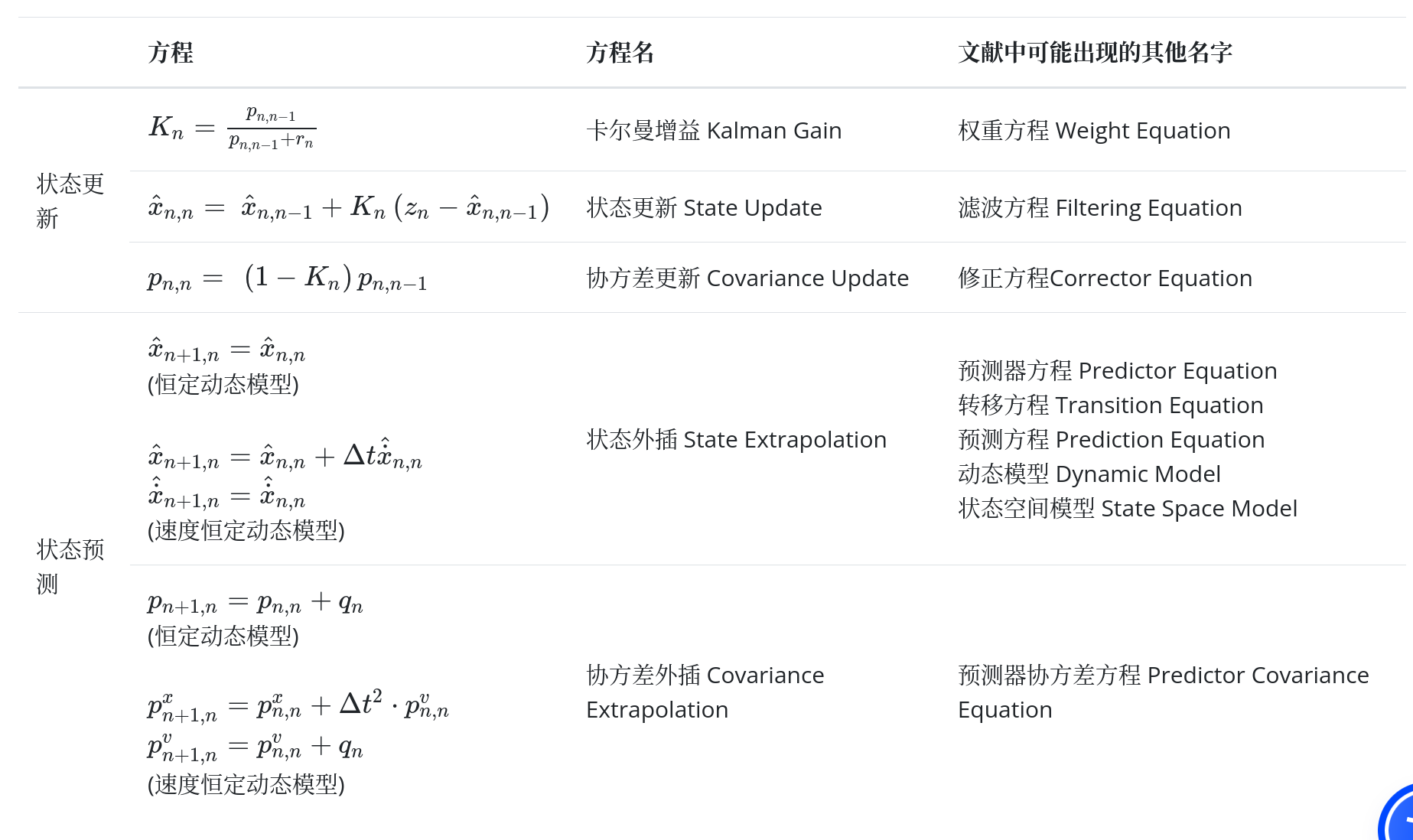
加入了过程噪声后的一维卡尔曼滤波方程
















 1076
1076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











