






一 背景
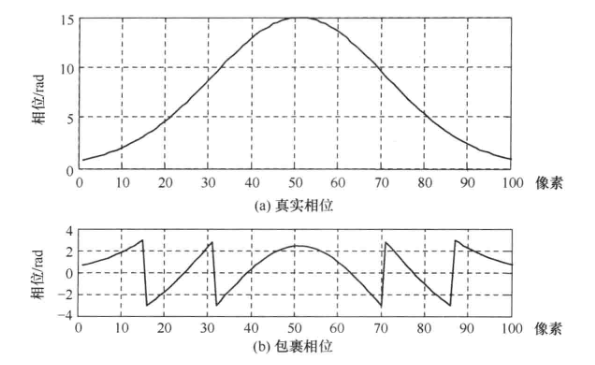
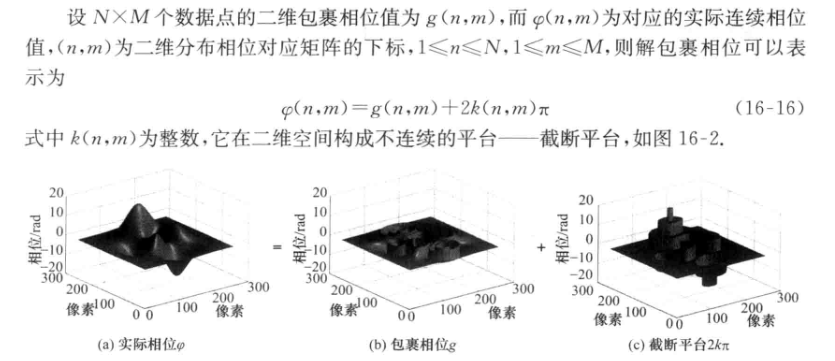
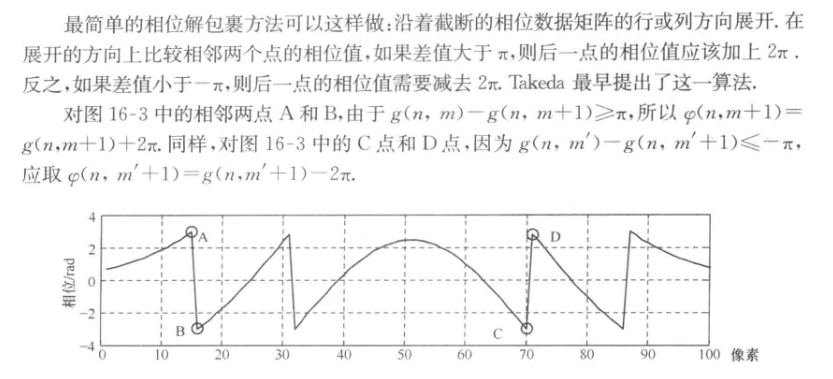
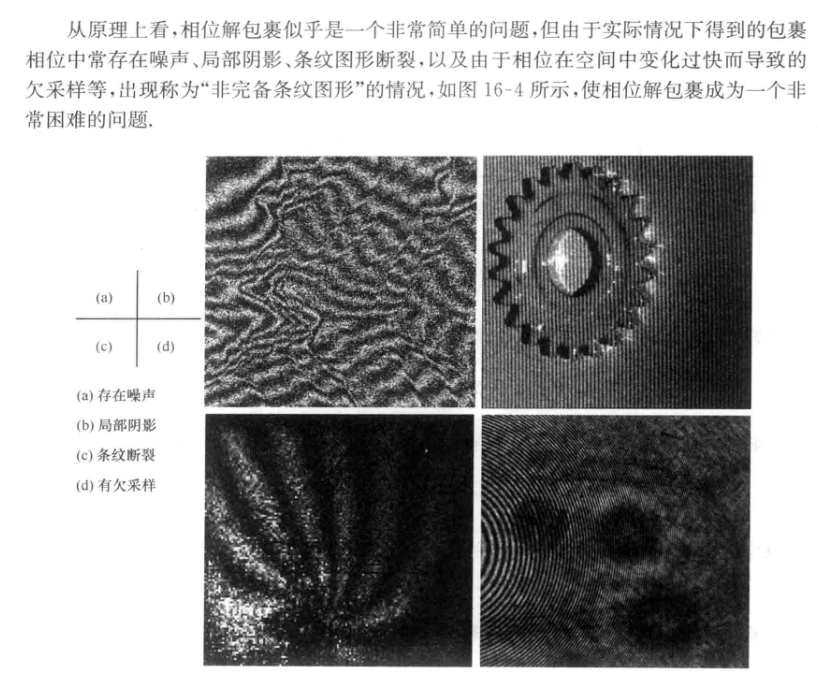
在全息干涉测量中为了得到所需的测量值,通常需要经过相位计算,但是实验得到的相位是“包裹相位”,这是因为计算相位一般需要使用反正切函数,而其主值域是[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FwDoSATW-1648479849953)(https://cdn.nlark.com/yuque/__latex/ca57bfdcb37cb496a6a4adf867d39d39.svg#card=math&code=%28-%5Cpi%2C%5Cpi%5D&id=JBUue)],因而相位被限定在[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-s0t5M9Ox-1648479849955)(https://cdn.nlark.com/yuque/__latex/b0b2bf599e1edc61886b00556a3caed3.svg#card=math&code=%EF%BC%88-%5Cpi%2C%5Cpi%5D&id=fCLTB)]之内,直接计算得到的相位被“截断”(或者称为“包裹”或“缠绕”),所以不能直接得到待测的真实连续相位。如下图所示,实际测量时必须将被包裹的相位展开,这个过程即称为相位解包裹,也称相位展开、解缠或者解相等。[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-974dfYH5-1648480013522)(!%5Bimage.png%5D%28https://img-blog.csdnimg.cn/img_convert/cbfd03a2bf3efddd3925bb923508f8a8.png#clientId=ue4fdb0c3-c996-4&crop=0&crop=0&crop=1&crop=1&from=paste&height=275&id=u9fe3217e&margin=%5Bobject%20Object%5D&name=image.png&originHeight=365&originWidth=595&originalType=binary&ratio=1&rotation=0&showTitle=false&size=84428&status=done&style=none&taskId=u5dcc00e9-350b-495b-9b2f-c16aa8451f6&title=&width=447.5%29#pic_center)]
二 数学原理
2.1 数字全息记录光场相位
在全息光场中,假设某点[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CEWU7zCR-1648479849958)(https://cdn.nlark.com/yuque/__latex/e6d2f939b9e7c3bc084e9b58b2d48ddf.svg#card=math&code=%EF%BC%88x%EF%BC%8Cy%EF%BC%89%0A&id=rtvcP)]处的物光场和参考光场分别为[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ubJhXLul-1648479849959)(https://cdn.nlark.com/yuque/__latex/e440615fc071a015584f910d3eebc6ac.svg#card=math&code=O%28x%2Cy%29%3Do%28x%2Cy%29e%5E%7Bi%5Cvarphi%28x%2Cy%29%7D%20%0A&id=hVFaO)]和[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VYdyX51M-1648479849959)(https://cdn.nlark.com/yuque/__latex/c5d0eee6c04d539caa03516db331be4f.svg#card=math&code=R%28x%2Cy%29%3Dr%28x%2Cy%29e%5E%7Bi%5Cphi%28x%2Cy%29%7D%20&id=orluq)],参考光和物光相互尕摄从而记录物体的相位
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GgqjJWgZ-1648479849960)(https://cdn.nlark.com/yuque/__latex/e23fb8759710e2e348fffdde048fabbc.svg#card=math&code=%5Cbegin%7Balign%2A%7D%0A%20%20I%28x%2Cy%29%26%3D%5BO%28x%2Cy%29%2BR%28x%2Cy%29%5D%5E2%20%5C%5C%0A%20%20%26%3D%5BO%28x.y%29%2BR%28x%2Cy%29%5D%2A%5BO%28x.y%29%2BR%28x%2Cy%29%5D%5C%5C%0A%20%20%26%3DO%28x%2Cy%29%5E2%20%2BR%28x%2Cy%29%5E2%2B2o%28x%2Cy%29r%28x%2Cy%29cos%5B%5Cvarphi%28x%2Cy%29-%5Cphi%28x%2Cy%29%5D%0A%5Cend%7Balign%2A%7D&id=enD6d)]
显然,若[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-36DwhtIx-1648479849961)(https://cdn.nlark.com/yuque/__latex/1d2445e70e08d2d58991a30d1d88771c.svg#card=math&code=%5Cvarphi%20%28x%2C%20y%29-%5Cphi%28x%2Cy%29%20%3D%202k%5Cpi&id=laIlv)],其中[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UFUjRhH0-1648479849961)(https://cdn.nlark.com/yuque/__latex/70dcaf8e1ab75a9b6e5fd17fc5dda549.svg#card=math&code=k%3D0%2C%5Cpm1%2C%5Cpm2%20%5Ccdots&id=Sf6K0)],则[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-S2aQAv7G-1648479849962)(https://cdn.nlark.com/yuque/__latex/90cbc22edf225adf8a68974f51227f05.svg#card=math&code=%28x%2Cy%29&id=NQ4EC)]处将出现明条纹;若[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6ELgt7iX-1648479849962)(https://cdn.nlark.com/yuque/__latex/3eb633b032879fd40c1473942762e587.svg#card=math&code=%5Cvarphi%20%28x%2C%20y%29-%5Cphi%28x%2Cy%29%20%3D%282k%2B1%29%5Cpi&id=gGmeS)],[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VHpB1nst-1648479849963)(https://cdn.nlark.com/yuque/__latex/70dcaf8e1ab75a9b6e5fd17fc5dda549.svg#card=math&code=k%3D0%2C%5Cpm1%2C%5Cpm2%20%5Ccdots&id=L5u4r)],则[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-At6m7ODi-1648479849963)(https://cdn.nlark.com/yuque/__latex/90cbc22edf225adf8a68974f51227f05.svg#card=math&code=%28x%2Cy%29&id=UdREN)]处将出现暗条纹。
所以,全息图实际上就是一幅干涉图,用干涉条纹的明、暗记录相位———物光于参考光的相位差。
2.2 相位重建基本原理
通过干涉图重建光场相位常用的方法共有三种:
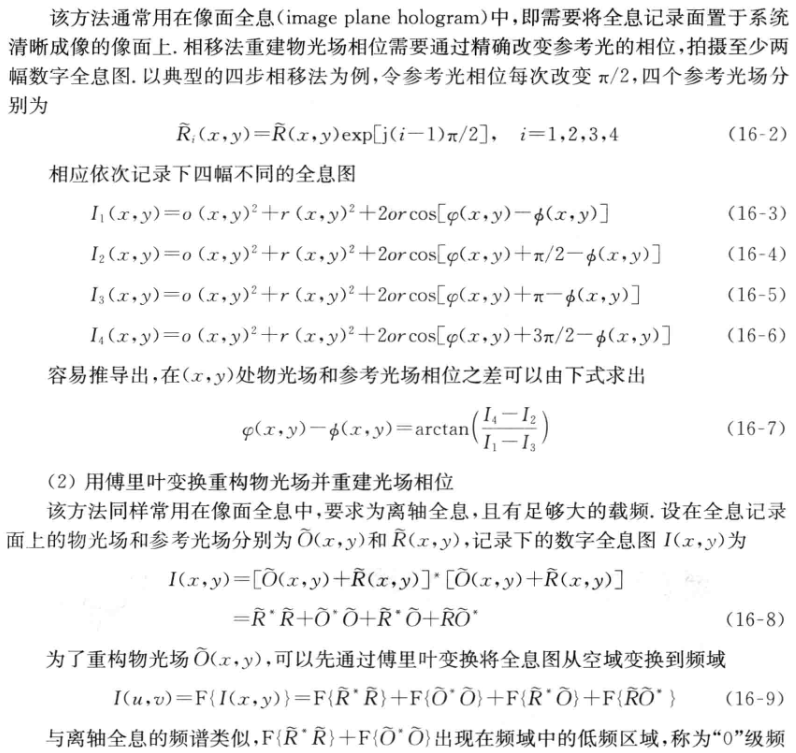
- 用相移法重建全息记录平面上物光场相位
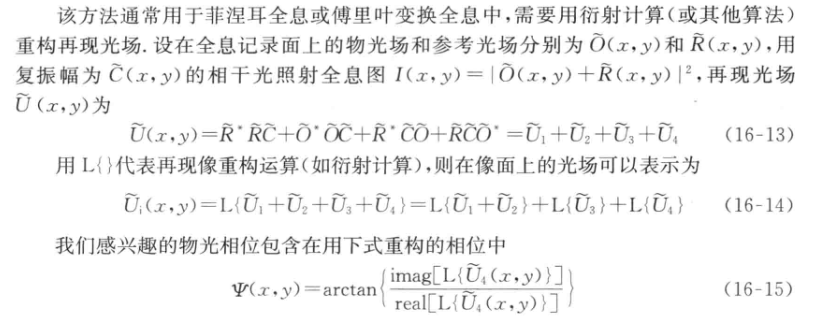
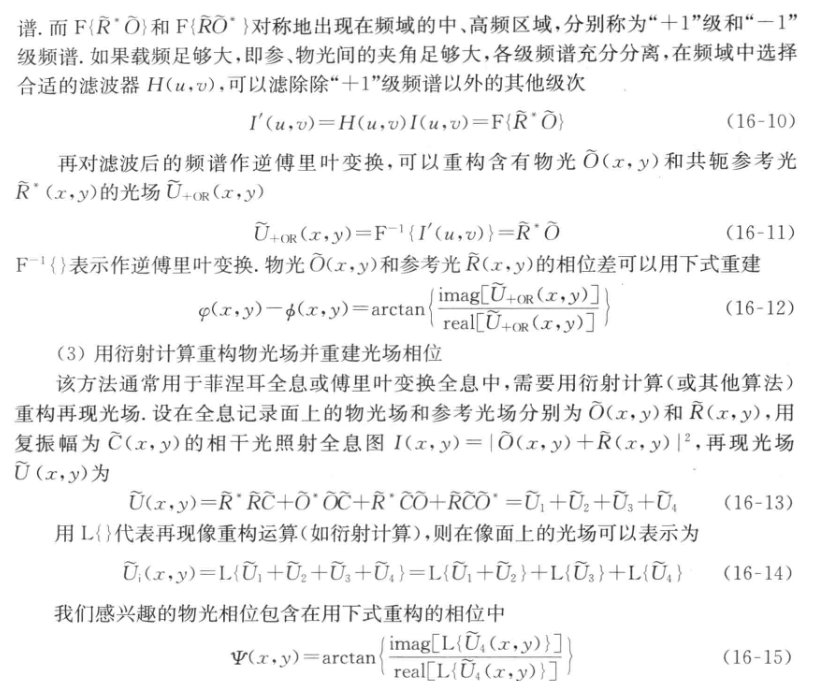
- 用衍射计算重构物光场并重建光场相位
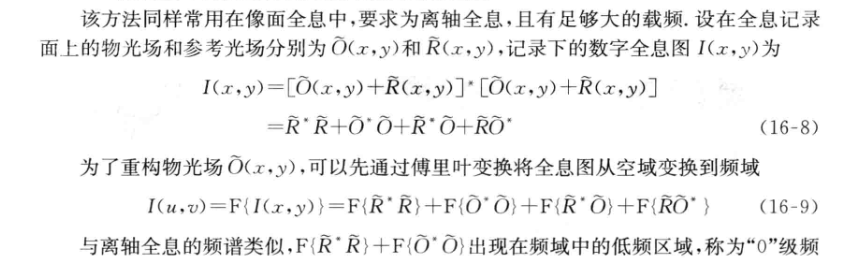
- 用傅里叶变换重构物光场并重建光场相位
- 相位法重建
- 衍射法重建
- 傅里叶变换法重建
2.3 相位解包裹算法
相位解包裹算法主要有两种:
- 路径跟踪算法(积分结果与路径无关)–枝切法
- 路径无关相位解包裹算法(最小范数解)
- 路径跟踪相位解包裹算法
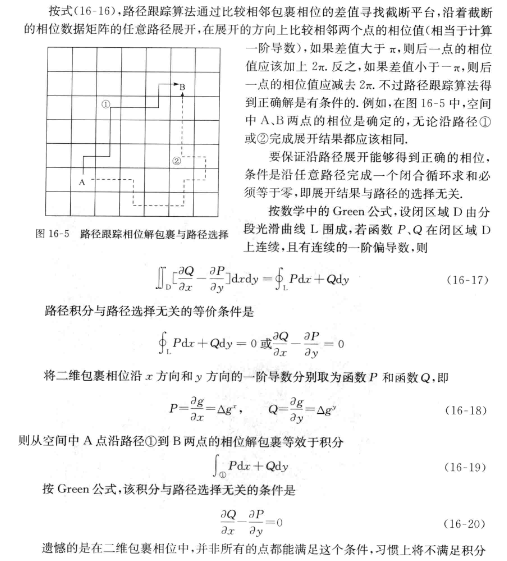
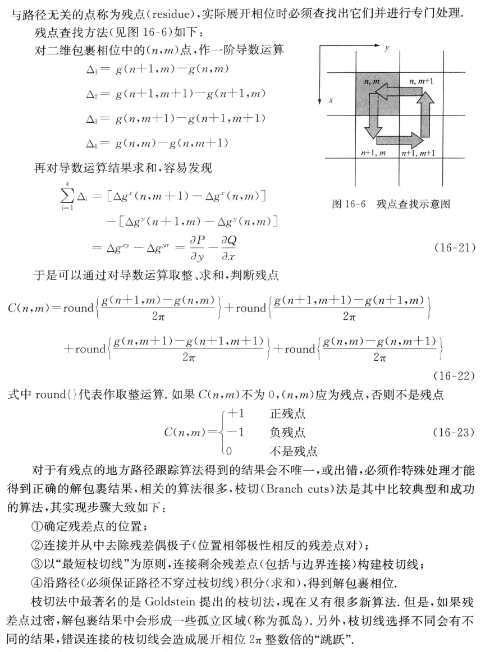
- 路径跟踪相位解包裹算法















 989
989











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









