







 该博客介绍了使用MATLAB进行全球导航卫星系统(GNSS)的单点定位解算过程。通过间接平差原理,利用伪距观测值和已知卫星坐标,进行迭代计算以确定接收机的三维坐标。代码展示了从构建误差方程到求解接收机坐标的具体步骤,并最终输出了接收机坐标、站星距离和接收机钟差。
该博客介绍了使用MATLAB进行全球导航卫星系统(GNSS)的单点定位解算过程。通过间接平差原理,利用伪距观测值和已知卫星坐标,进行迭代计算以确定接收机的三维坐标。代码展示了从构建误差方程到求解接收机坐标的具体步骤,并最终输出了接收机坐标、站星距离和接收机钟差。
基于MATLAB的GNSS单点定位解算
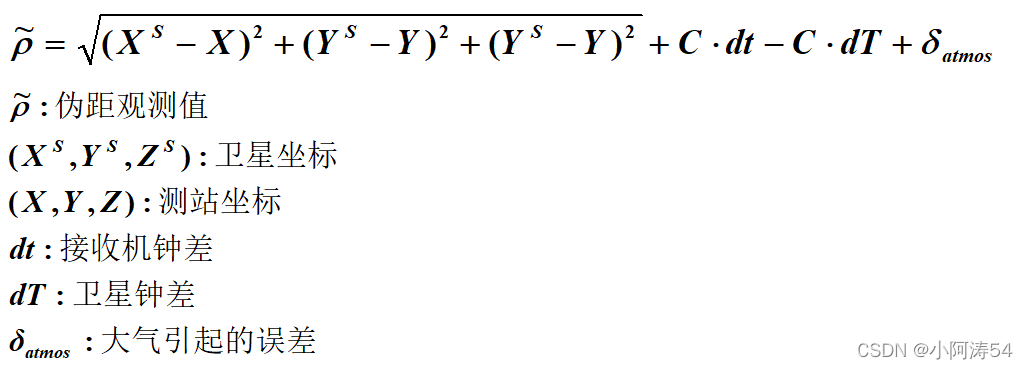
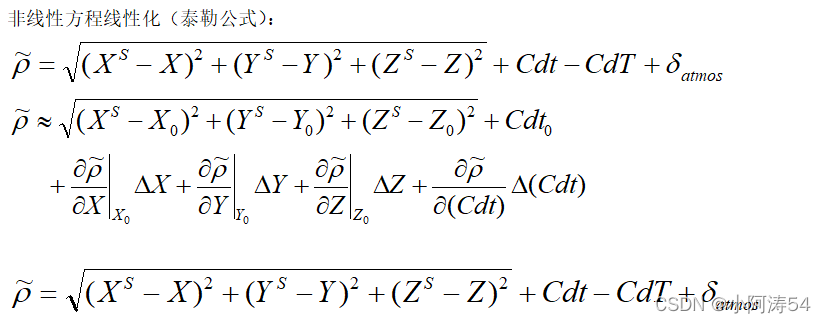
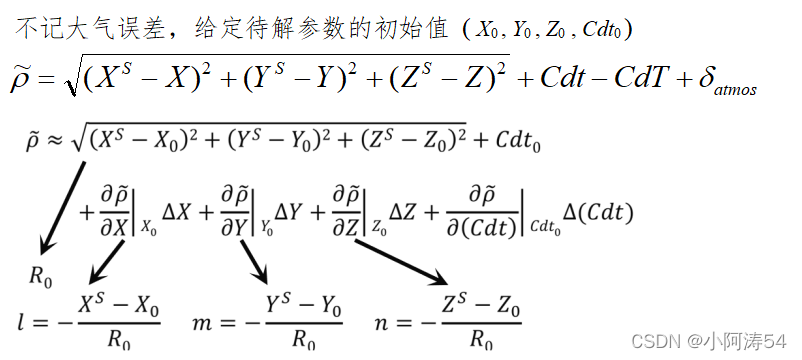
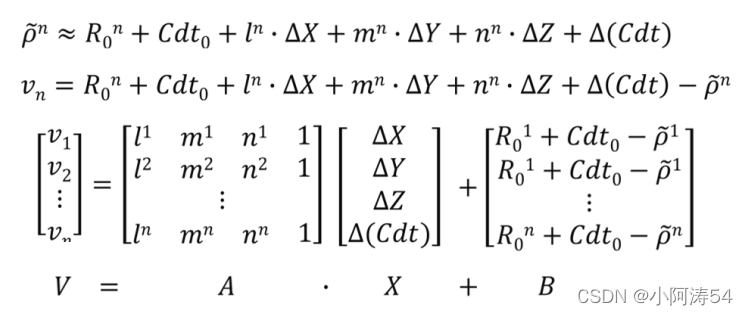
1、间接平差原理:
2.代码部分
% 已知伪距观测值,卫星坐标
% GNSS单点定位解算
% 已知X,Y,Z卫星坐标,和伪距P
P = [24115224.586, 23852690.710, 22389912.802, 24577319.825, 23384340.177, 24479081.841]';
X = [4791839.793, 24513555.750, 14424694.880, 2438267.619, 24699645.220, 20750469.480];
Y = [-16027953.710, 2290238.988, -12687500.250, -27845730.100, -2345295.901, -18429010.410];
Z = [23259013.420, 14685609.220, 20602453.000, 3484060.793, 14750395.800, -7962146.345];
% S是X, Y, Z的坐标 合矩阵
S = [X; Y; Z];
% 用来计算迭代次数的num
num = 0;
% 接收机坐标的初始值设为(0, 0, 0)
site_0 = [0 0 0 0]'; %分别是X0 Y0 Z0 Cdt
% 给需要用到的参数预先分配内存
Rs = zeros(1, 6);% 站星距
l = zeros(1, 6);
m = zeros(1, 6);
n = zeros(1, 6);
dCdt = zeros(1, 6);
f = zeros(1, 6);
% 迭代开始
while 1
for t=1:6 % 此处利用向量的方式更好
% 循环计算第t个卫星的站星距离
Rs(t) = sqrt((S(1, t)-site_0(1, 1))^2 + (S(2, t) - site_0(2, 1))^2 + (S(3, t) - site_0(3, 1))^2);
% 由于接收机钟差造成的距离误差Cdt取一个值
% 计算第t个站星距离的泰勒展开式中的偏导数l, m, n, dCdt = 1;
l(t) = (site_0(1, 1)-S(1, t))./Rs(t);
m(t) = (site_0(2, 1)-S(2, t))./Rs(t);
n(t) = (site_0(3, 1)-S(3, t))./Rs(t);
dCdt(t) = 1;
%计算自由项
f(t) = P(t)-Rs(t)+site_0(4); %s ite_0(4)是Cdt
end
% 循环进入下一颗卫星
% 待到1-6个卫星都被计算后 ,将所有的卫星的系数组成误差方程,以(x, y, z, cdt)为未知数进行求解
A = [l', m', n', dCdt'];
L = f';
X = (inv(A'*A))*(A'*L);
V = A*X-L;
Xi = site_0 + X;
% 如果deltaX小于0.001,则说明上述所计算的接收机坐标基本接近实际值,则结束迭代,反之用本次计算出的接收机坐标重新循环迭代
if abs(X(1, 1)) > 0.001||abs(X(2, 1)) > 0.001||abs(X(3, 1)) > 0.001
site_0 = Xi; % 把本次用到的坐标赋值给site_0,以便下次循环
num = num + 1;
else
site_0 = Xi; % 求得满足条件的XYZ,结束迭代
break;
end
end
% 输出卫星坐标
Xr = site_0(1:3, 1);
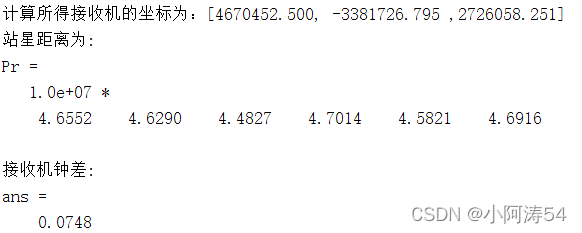
fprintf('计算所得接收机的坐标为:[%.3f, %.3f ,%.3f]',Xr);
fprintf('\n');
% 输出站星距离
disp('站星距离为: ')
t = 1:6;
Pr(t) = sqrt((S(1,t) - site_0(1,1)).^2+(S(2, t) - site_0(2,1)).^2+(S(3,t)-site_0(3,1)).^2)+site_0(4)
%接收机钟差
fprintf('\n');
disp('接收机钟差:')
site_0(4)/(3e+08)
3.最终结果:
4.间接平差C语言:C语言间接平差

















 793
793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









