






深度学习算法研究与开发离不开数据库,在这里对较为常用的点云三维数据库作整理,以便后续研究使用过程。这里将开源点云三维数据库分为两类:室外三维数据集和室内三维数据集。
室外三维数据集:通常采用激光雷达采集,分辨率有限,垂直方向上分辨率由激光雷达线束数量决定;室内三维数据库:通常采用精度更高的激光雷达或者RGB-D深度相机进行采集。
1.ModelNet40
官方下载地址:https://modelnet.cs.princeton.edu/
GitHUb下载地址:https://github.com/datasets-mila/datasets--modelnet40
项目的目标是为计算机视觉、计算机图形学、机器人技术和认知科学领域的研究人员提供服务具有全面、干净的对象3D CAD模型集合。ModelNet40包含40个不同类别,共计9843个模型,每个类别包含多个三维几何形状模型,包括桌子、椅子、车等。这些模型采用三维网格进行表示,且位于同一坐标系,以点云形式给出,既包含每个点的三维信息,也包含每个点的法向量信息。
2.KITTI
官方下载地址:https://www.cvlibs.net/datasets/kitti/
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像,光,视觉测距,3D物体检测和3D跟踪等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。 3D目标检测数据集由7481个训练图像和7518个测试图像以及相应的点云数据组成,包括总共80256个标记对象。
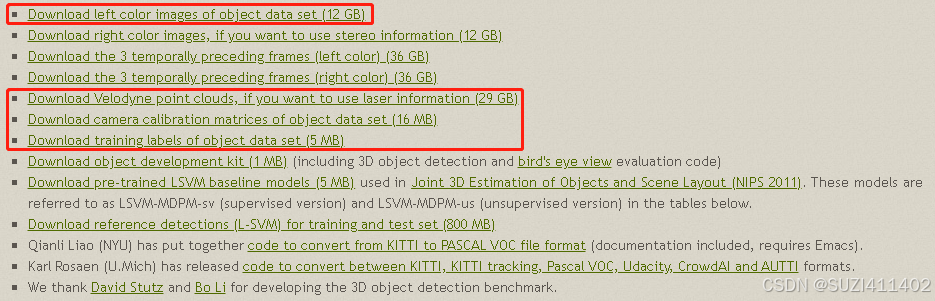
下图红色框标记的为需要的数据,分别是彩色图像数据(12GB)、点云数据(29GB)、相机矫正数据(16MB)、标签数据(5MB)。其中彩色图像数据、点云数据、相机矫正数据均包含training(7481)和testing(7518)两个部分,标签数据只有training数据。
3.NuScenes
官方下载地址:https://www.nuscenes.org/nuscenes#download
NuScenes 数据集是由 Motional(前身为 nuTonomy)团队开发的用于自动驾驶的公共大规模数据集。Motional 正在使无人驾驶汽车成为安全、可靠和可访问的现实。通过向公众发布数据子集,Motional 旨在支持对计算机视觉和自动驾驶的公共研究。数据集来源于波士顿和新加坡采集的1000个驾驶场景,每个场景选取20s长的视频,共计大概15h的驾驶数据,场景充分考虑多样化的驾驶操作、交通情况和意外情况等。
4.S3DIS
官方下载地址:https://paperswithcode.com/dataset/s3dis
S3DIS数据集是一个广泛应用于3D点云处理和计算机视觉研究领域的公开数据集,适用于各种点云分析任务,如语义分割、物体识别等。S3DIS数据集包含了大量的室内场景点云数据,每个点云数据都经过详细的标注,提供了丰富的语义信息。
5.ScanNet v2
官方下载地址:ScanNet v2
ScanNet 是一个 RGB-D 视频数据集,包含 1500 多次扫描中的 250 万个视图,并使用 3D 相机姿势、表面重建和实例级语义分割进行注释 。 ScanNet V2数据集一共1.2T 。RGB-D 传感器是一种特定类型的深度感应设备,与RGB(红色、绿色和蓝色)传感器相机配合使用。 它通过在每个像素的基础上使用深度信息(与传感器的距离相关)来增强传统图像,即RGBD = RGB + Depth Map。一共1513个采集场景数据(每个场景中点云数量都不一样,如果要用到端到端可能需要采样,使每一个场景的点都相同),共21个类别的对象,其中,1201个场景用于训练,312个场景用于测试 。
6.SUN RGB-D
GitHub地址:SUN RGB-D
SUN RGB-D 数据集是一个用于RGB-D(颜色和深度)视觉研究的大型数据集,包含多种日常场景的图像和深度数据。该数据集用于各种计算机视觉任务,如物体识别、场景理解和3D重建,其中包含来自不同传感器获取的图像,包括深度相机和RGB相机。


















 2584
2584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









