






这是一篇几年前关于的Cassie腿部运动方法,论文虽然没有给源代码,但是文章内容非常详细
[2011.01387] Sim-to-Real Learning of All Common Bipedal Gaits via Periodic Reward Composition
INTRODUCTION
1. 研究目的
作者针对双足机器人底盘,也就是类似cassie这种,通过强化学习设计奖励函数,在不使用轨迹跟踪的条件下(因为稳定的轨迹难以获取,且泛化性差),用一个模型实现双足机器人所有常见的双足步态,包括:站立,行走,跳跃,奔跑等,且可以进行平滑的切换
2. 面临的问题
不同步态学习的关键问题在于如何构造奖励函数,使其既能明确表达预期的运动模式,又足够灵活以适应环境变化。
- 现有的常见方法是,给定精确的参考轨迹,这个方法确实解决了前面的第一个问题,即能明确表达预期的运动模式,参考轨迹只捕获了不同条件下实现步态特征的一小部分变化,这样对于步态的鲁棒性的影响是负面的
- 另一种不适用参考轨迹的方法,往往不够具体(比如只给一个前进的速度奖励),这样机器人学到的行为之间差异很大,需要不断的调试,细化奖励的设计,适应性差
3. Motivation
常见的双足步态,对于每只足,都可以分化为swing与stance两个阶段,而这两个阶段最显著的区别在于,足部对里面的力反馈与足部速度的互补存在与缺失。
即,Stance阶段,允许与地面的反馈力存在,而惩罚足部速度。Swing阶段,惩罚与地面的力反馈,而允许足部速度存在。
基于这样的框架,可以将常见双足步态描述为一系列的周期性运动阶段,在特定阶段惩罚或允许特定量。
这样用更加自然的奖励函数规范,充分约束RL学习的步态特征,并且适应性强。
4. 本文贡献
- 本文提出了一个设计奖励函数的原则性框架,可以捕获所有周期性双足运动的步态
- 在仿真中训练的策略可无缝迁移至真实机器人 Cassie,并实现多个步态间的切换
BACKGROUND
这里就简述一下背景,主要是当前双足运动的方法现状
-
双足步态的复杂性
自然界中的双足步态(如走、跑、跳等)具有明确的周期性结构,同时需要在不同环境下具备适应能力。如何让机器人学会这些步态,尤其是在现实世界中应用,尚未解决 -
奖励函数在步态学习中的核心作用
在强化学习中,奖励函数引导机器人行为的收敛方向。为学习特定步态,奖励函数需满足两个条件:-
要足够明确,以促使策略学习到期望的步态模式;
-
同时也要不过于刚性,以保留适应不同动态与环境扰动的能力。
-
-
现有方法的局限性
-
许多方法依赖于预设的参考轨迹(如关节角度序列),这在一定程度上解决了“明确性”问题,但缺乏“适应性”,无法涵盖步态应对复杂环境的变异性。
-
而完全无参考的奖励函数通常设计得过于模糊或高度依赖经验调试,不具通用性,难以迁移与泛化
-
REWARD COMPOSITION
强化学习过程这里就不赘述了 skip
作者将机器人步态运动的奖励,分为了两个部分,一部分为周期运动有关的周期性(阶段性)奖励,另一个为全程存在,一般作为约束项(比如能量惩罚)或者控制项的奖励(比如速度方向命令)
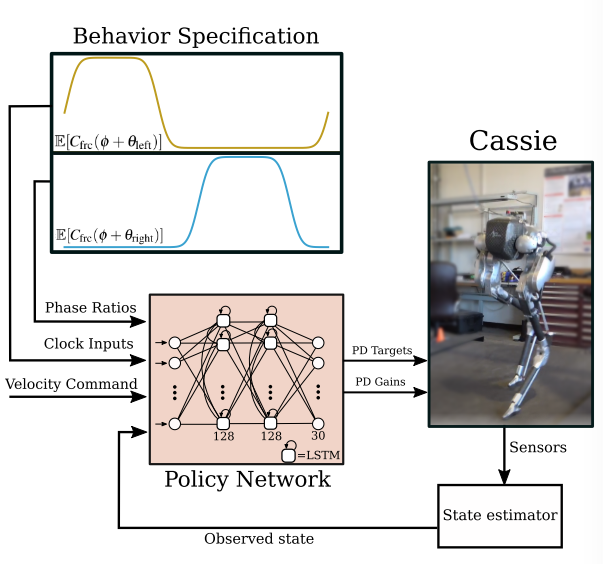
整体框架如图
1. Preiodic Reward
1. 用在[0,1]上循环,对时间进行索引,就是常见的正弦函数的变化,防止信号突变,现有的大部分足式机器人周期性运动都这样处理
2. 将周期性奖励范式为:
![]()
输入为当前观测值S与时钟信号,beta为偏置,不用管。其中每个分量
用于捕获特定阶段步态的期望特征,表示为:
![]()
其中决定该项奖励对总奖励的影响(其实就是正奖励还是负奖励)。
是该项奖励的奖励度量值(譬如在站立阶段的力反馈奖励,这个就是采样的足部力反馈)。
是一个二维随机变量,输入为时钟信号,判断该时钟信号是否处于该项奖励的目标相位范围内,若在范围内,则为1。
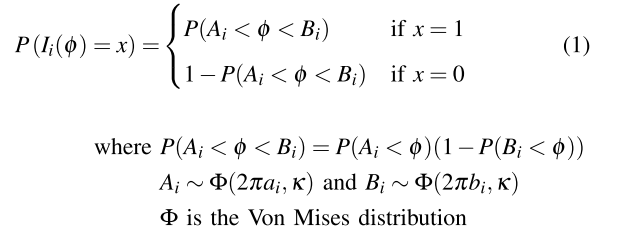
其中的分布用随机变量Ai和Bi来表示,分别代表阶段的开始与结束,它们由 Von Mises 分布建模,后者是环形分布(适合建模周期变量),近似于“包裹正态分布(wrapped normal)”。参数形式为
:分别是起始期望值、终止期望值,以及共享的集中程度(方差的倒数)。
也就是说,每一个阶段,对应一个A、B、k(这个不同阶段的值相同,为公共尺度),输入一个时钟信号进去,函数会在A和B进行一个类似正态分布的采样,mean=A\B,std=k,然后生成多组区间,假设采样10次,也就是生成的10组区间,判断是否在区间内。若
在(A+B)/2 附近,那么在区间内的概率肯定是1;但若
在A或者B附近,那么在区间内的概率是0到1之间线性变化的。这样避免了对阶段的刚性判断。
这个还是蛮重要的,即使是现在, 还有很多方法是刚性的周期判断处理,而作者这样处理后,对阶段边界的奖励有平滑作用,有“训练稳定性”与“可调节模糊性”的作用。
既然有了概率,那么奖励就变成了概率 * reward,也就是期望

2. Describing Bipedal Gaits
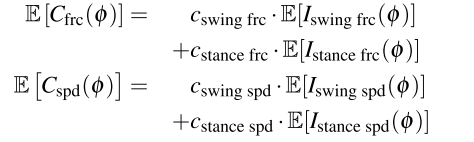
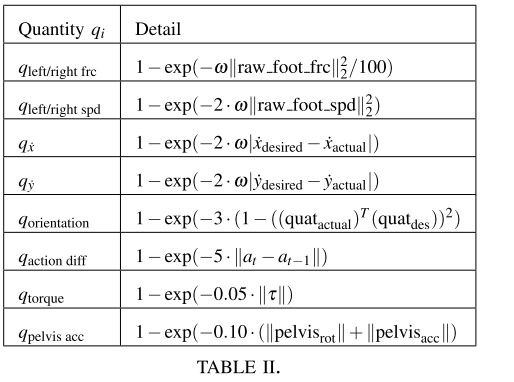
单脚的摆动与站立之间的循环作为奖励框架,奖励度量值选择足部力范数与足部速度范数与
。摆动期间,允许足部速度,惩罚足部力,即
,
。类似的,站立阶段,惩罚足部速度,允许足部力量
,
。
用比率设置两阶段的时间间隔,使Swing阶段的持续长度为r,站立阶段的持续长度为1-r,并且两个阶段相互紧紧跟随,持续整个循环时间。
那么,每个足分站立与摆动两个阶段,每个阶段分速度与力反馈奖励,也就是2*2=4个奖励分量,如下:
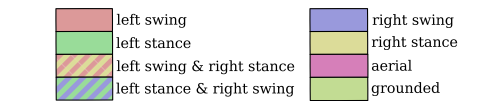
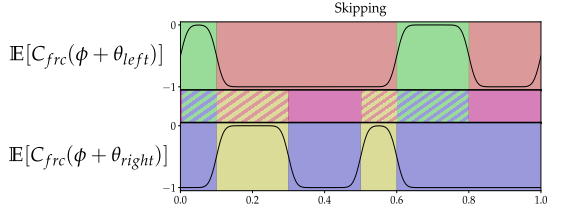
下图用于理解相位变化与奖励的关系:
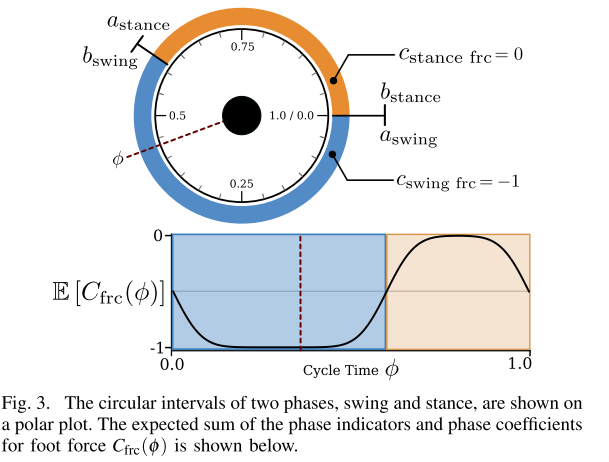
一个周期中,根据设计的步态,选择一个点为swing or stand的起点或者终点,根据比率r,决定了这个阶段的持续时间,阶段结束后,立刻进入下一个阶段,且持续时间为1-r。swing阶段,惩罚力反馈的值,所以为-1,这样一旦采样到足部反馈力,就会有负的奖励;而站立阶段
为0,这样即使采样到足部反馈力,也不会有惩罚
这样一来,将速度与力的分量结合,重复两个阶段的预期总体return为:

另一方面,作者提到,双足步态中,双足其实都遵循相同的相位序列,只是相位时间上相互偏移,比如,在正常行走中,摆动和站立的持续时间分别为周期长度的一半,且相互偏移半个周期,而跳跃则是同时进入站立或摆动 。
为了将单脚抬起和放置的简单行为扩展到双足步态的全部范围,只需要引入两个周期偏移参数左,
右,它们定义了左右脚相同行为阶段序列之间的精确时序位移。
最后,双足步态的预期总体奖励为:
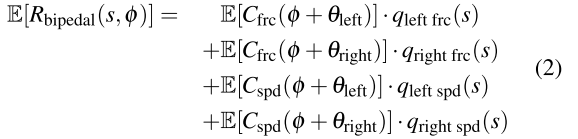
3. 步态分析:
1. 跳跃
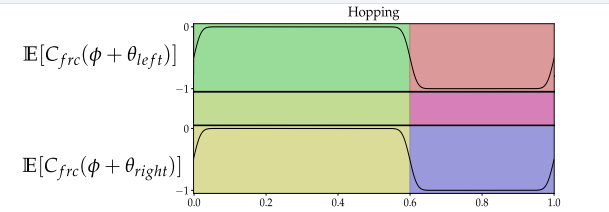
双足没有周期相位差,同时进入跳跃(摆动)阶段
2. 奔跑
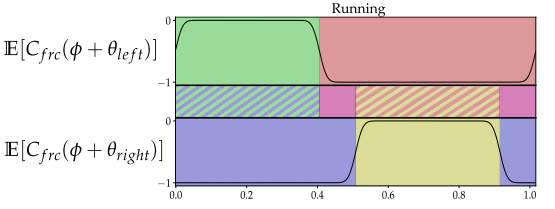
双足有半个周期的相位差,且奔跑只有单脚站立和双脚摆动两个阶段,只需要比率r > 0.5即可,这里是0.6
3. 跳跑
这里就比较复杂,10 -> 01 -> 00 -> 01 -> 10 -> 00,两步跳跃?总之相位差也是半个周期,这里就可以显示作者方法的强大之处,只要是周期性循环的,都可以用这个框架来描述
METHOD
网络架构与action space
作者用的LSTM,两个循环隐藏层,节点数为128,动作空间为30(10个关节期望位置与10组PD参数),策略在40Hz下进行评估,机器人的PD控制器在2000Hz下运行
状态空间
作者提到,为了防止RL环境变成不稳定的MDP过程,需要将当前周期的编码,周期偏移参数(左和右),以及关于相位奖励组件的阶段的开始和结束时间的信息。
周期信号表示为:

L是整个循环中离散时间步长的个数。
为了将相位的开始和结束时间的信息编码到状态中,作者从相位时序中导出一个比率向量;每一个比率表示一个相在总周期中所占的比例。例如,开始时间为ai, j=0.3,结束时间为bi, j= 0.7的相位j应占总周期时间的40%(加上或减去一些不确定性) ;因此,我们可以推导出比值rj =0.4,且将比率提供给策略。
最后,策略的输入,也就是观测空间为:
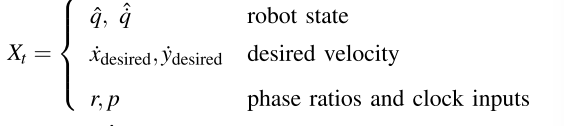
第一行为机器人自身状态,也就是朝向,关节位置,根部速度,关节速度;第二行为控制命令,第三行为前面提到的比率r与时钟信号
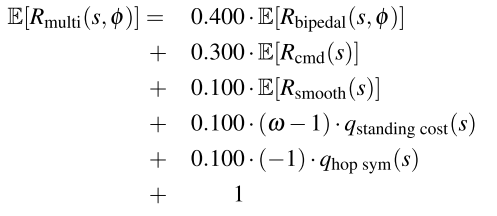
奖励公式
前面的公式2作为足部运动描述的周期性奖励框架;为了实现运动的稳定性,且sim2real,需要加一些惩罚项;然后实现命令的跟踪,需要增加命令相关奖励项。这三个分支组成整体的奖励。
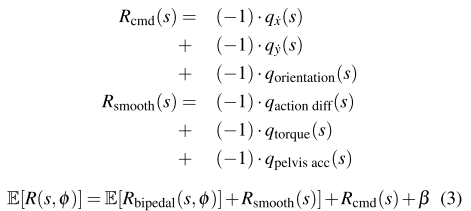
一个命令奖励,用于跟踪方向和行进速度;一个smooth奖励,就是防止扭矩、action、根部加速度变化突变过大。
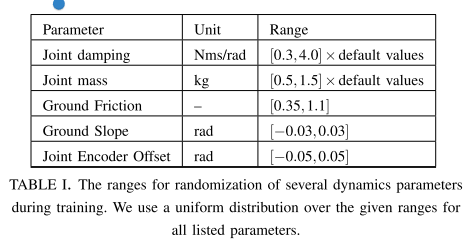
Dynamics Randomization
这个没什么好说的,就是加随机,弥补sim与real的gap,现在的方法可以对运动学建模 +动力学随机,或者类似ASAP,用der_action来弥补。对于步态任务来说,运动学建模 +动力学随机就够了,或者动力学随机就行。
PPO算法
这个同样没什么好说的,现在大家都用的这个迭代算法,作者提到,他们为了保证运动的对称性,增加了一个mirror loss。
EXPERIMENTAL
Train Details
为了学习高效的步态策略,作者使用了 Proximal Policy Optimization(PPO)算法,并进行了如下配置:
-
轨迹批次(Batch):每次训练以 32 条轨迹为单位,每条轨迹最长为 300 个时间步。
-
学习率(Learning Rate):Actor 和 Critic 网络统一设为 0.0001。
-
重放缓冲区(Replay Buffer):缓存 50,000 条状态转移数据。
-
训练轮数(Epochs):每次迭代执行 4 次训练周期。
-
训练样本总数:1.5 亿个样本,训练时间约为 24–36 小时。
训练环境为cassie-mujoco-sim
Single-Gait Policy Results
从最基础的“单一行为控制”入手,即训练策略生成某一种固定的步态,如行走、跳跃或奔跑。这一目标可以通过以下方式轻松实现:
-
固定相位比(r):控制 swing/stance 比例,决定机器人每一步中空中与落地的时间占比。
-
固定周期偏移参数(θ_left, θ_right):定义左右腿相位的时间差。
只要保持这两个参数不变,就能稳定训练出特定风格的步态。例如:
| 步态类型 | 特征参数 | 训练表现 |
|---|---|---|
| 跳跃 hopping | θ 左右接近,r 高 | 快速收腿、高空弹跳 |
| 行走 walking | θ 左右交错,r 中 | 中速交替移动 |
| 奔跑 running | θ 左右交错,r 高 | 快速对称步伐 |
| 小跑 skipping | θ 左右适中,r 中 | 弹跳中略显轻盈 |
Multi-Gait Policy Results
目标是让一个策略能切换不同步态,这就需要训练它对“步态参数”做出反应。但事情远比预想复杂。
方法一:固定 θ,变化 r
这种方式可以学习在固定交错节奏下,改变 swing/stance 比例,从而实现:
-
跳跃时间不同的 hopping
-
行走与奔跑的自然过渡
特点: 表现良好,策略能适应连续变化的 r。
方法二:同时变化 θ 和 r
这才是真正的挑战。虽然从理论上讲,调节相位差和步态比例应该能产生更丰富的行为组合,但实际训练结果往往不理想:
-
学出来的行为容易是 不对称步态,例如某一条腿一直先迈出。
-
策略会产生 模糊融合行为,无法明确区分“这是跳跃还是行走”。
特点:策略会“混乱”,失去对不同 gait 的清晰理解。
方法三:同时变化 θ 和 r + 引入过渡惩罚(Transition Penalties)
为了解决多步态学习中的“模糊行为”问题,作者提出了一个简单有效的机制:行为特定惩罚项。
-
不同的步态有其独特的结构特征。
-
在训练中识别当前指令代表哪种步态,然后引入惩罚以强化其结构特征,避免混淆。
-
步态 激活时机 惩罚设计 跳跃 hopping θ_left ≈ θ_right 惩罚双脚之间的距离大,鼓励脚靠近一起 切换 standing
需要切换 增加另一个站立惩罚
附录
作者这里提到了一些,步态切换的细节,这里也是很重要的一部分
多步态学习中,光靠标准奖励函数是不够的,尤其是在处理复杂或边缘行为(如平稳站立或对称跳跃)时。为了解决策略出现 行为异常或模糊过渡 的问题,作者引入了两种额外的调制项:
(1)Hop Symmetry Term:约束跳跃的对称性
问题:
在训练连续的 2-beat 步态(如 hop/walk/run 过渡)时,发现策略容易学到 stutter(颤抖)式步态,而不是标准的“双足同时跳跃”。
这种“颤抖”行为在 单独训练跳跃(固定跳跃参数)时并不会出现。
解决方法:
引入一个 跳跃对称性惩罚项(hop symmetry cost),仅在跳跃行为被 command 时激活。
-
激活条件:左右腿周期偏移
θ_left ≈ θ_right -
惩罚对象:两个脚在 矢状面(前后)和横向面(左右) 的距离差
-
具体实现:双脚距离差记作
err_sym,用于鼓励左右脚在跳跃时保持同步、靠近,避免非对称动作。 -

(2)Standing Cost:保持静止的奖励调制
目标: 让策略在接收到“站立”指令时,尽可能静止不动。
关键设计:
-
首先,定义 stand 为相位比
r_swing ≈ 0的区域,即脚几乎一直处于支撑相。 -
然后,引入一个权重系数 ω:

这个 ω 的作用如下:
r_swing值说明 ω 值趋势 ≈ 0 站立行为 ω ≈ 0 ∈ [0.35, 0.7] 正常 locomotion ω ≈ 1
在站立区域(ω ≈ 0)时:
-
激活两个惩罚项:
-
动作差惩罚(action difference cost):鼓励动作输出稳定、不跳变。
-
足部对称性惩罚(foot symmetry cost):与 hopping symmetry 类似,鼓励双足位置一致、稳定
-
-
最后站立的惩罚项目可以表示为:

这些设计使得策略在面对接近站立的 gait 参数指令时,自动学会收敛至静止姿态。
最终得到通用奖励框架:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









