







前言
串口通信是我们在学习单片机过程中非常重要的一个功能模块,这里就不讲述串口的理论知识,从如何使用的角度去分析。利用串口可以实现非常多的功能,市面上也有非常多的外设模块实现了通过串口的方式传输数据,例如:串口屏,串口转蓝牙,串口无线模块,陀螺仪模块,实时时钟模块,指纹采集模块等,几乎我们常用的模块都能通过串口方式去读取和发送数据,所以,串口非常重要,学会了串口收发数据,就能利用单片机实现非常多的功能。
一、串口是什么
串口叫做串行接口,也称串行通信接口,按电气标准及协议来分包括RS-232-C、RS-422、RS485、USB等。 RS-232-C、RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接插件、电缆或协议。USB是近几年发展起来的新型接口标准,主要应用于高速数据传输领域。串行接口是指数据一位一位地顺序传送,通过一根数据发送线和一根数据接收线组成,发送线以一定的规则进行高低电平变化,其中高电平为二进制数据1,低电平为二进制数据0,对数据进行规则编码发送,接收线接收到外部数据时,通过解码即可获取到数据。
二、单片机的串口
STM32硬件带有串口功能,通过查看STM32数据手册的引脚功能,如下所示,其中USART1_TX(PA9)为该单片机串口1的数据发送引脚,USART1_RX(PA10)为串口1的数据接收引脚,如若要使用这两个引脚作为串口功能,在软件配置时配置为该引脚就可以使用串口收发数据了。

串口异步通信需要定义的参数
① 起始位:标志着新数据的开始
② 数据位(8位或者9位):传输的数据
③ 奇偶校验位(第9位):验证数据是否准确传输
④ 停止位:标志着此数据传输结束
⑤ 波特率设置:传输速率设置,波特率越大,传输速率越快,传输单条数据长度越短
配置上只需要我们配置波特率就行,其余配置由官方库函数已经帮我们完成了,因此,我们还是直接调用官方库函数配置就行。
三、硬件连接
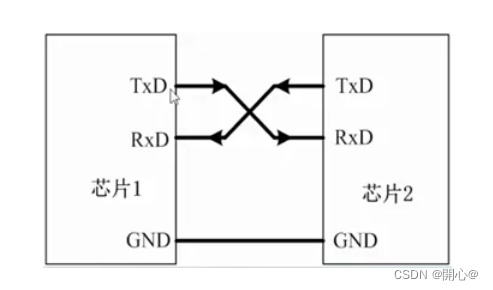
若两个单片机需要通过串口进行短距离数据传输时(实验测试),例如:两个单片机都采用串口1进行数据传输,只需要将单片机A的TX引脚(PA9)与单片机B的RX引脚(PA10)进行连接,单片机A的RX引脚(PA10)与单片机B的TX引脚(PA9)进行连接,这样,一个通信硬件就搭建完成。为了能直观的看到实验效果,最好采用一个单片机通过串口与电脑通信,通信成功后再去进行两个设备之间通信。
三、软件程序
为了工程管理,新建自己的库文件,具体新建方法参考STM32单片机GPIO,这里直接添加自己的串口模块到我们的工程里,如下所示:
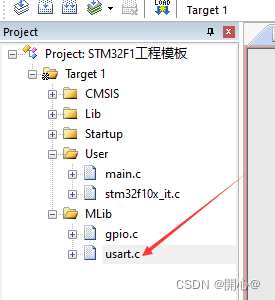
在usart.c文件中添加如下代码:
#include "usart.h"
void USART1_Config(void) //串口1配置,PA9-TX_PA10-RX
{
GPIO_InitTypeDef GPIO_InitStructure; //声明GPIO结构体
USART_InitTypeDef USART_InitStructure; //声明串口结构体
NVIC_InitTypeDef NVIC_InitStructure; //声明中断结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //使能串口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //配置串口发送引脚9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //设置为复用推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //传输速度50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化配置到GPIOA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //配置串口接收引脚10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //设置为浮空输入模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //传输速度50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化配置到GPIOA
USART_InitStructure.USART_BaudRate = 115200; //波特率设置为115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No ; //无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //串口发送接收都开启
USART_Init(USART1, &USART_InitStructure); //初始化配置到串口1
USART_Cmd(USART1, ENABLE); //使能串口
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); //配置接收中断分组为1
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //配置为串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //设置中断总优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //设置中断子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure); //初始化中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //使能串口接收中断,没有这句话不能接收
}
//重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch); // 发送一个字节数据到串口
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); // 等待发送完毕
return (ch);
}
//重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET); // 等待串口输入数据
return (int)USART_ReceiveData(USART1);
}
void USART1_IRQHandler(void) //串口1的数据接收中断
{
uint8_t temp; //定义临时数据存放变量
if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET) //判断是否为串口1中断
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清除接收中断标志位
temp = USART_ReceiveData(USART1); //接收到的数据赋值给temp
/* 这里写对接收数据temp的处理程序,例如:
if(temp==0)
{
熄灭LED;
}
if(temp==1)
{
常亮LED;
}
if(temp==2)
{
闪烁LED;
}
......
*/
}
}
以上配置中有串口的接收中断函数,若串口接收到数据,会中断跳到此处执行该函数,只需要对接收数据进行判断处理即可,usart.h代码如下:
#ifndef _USART_H
#define _USART_H
#include "stm32f10x.h"
#include <stdio.h>
void USART1_Config(void); //串口1配置,PA9-TX_PA10-RX
int fputc(int ch, FILE *f); //重定向c库函数printf到串口,重定向后可使用printf函数 main不需要配置
int fgetc(FILE *f); //重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数 main不需要配置
void USART1_IRQHandler(void); //串口1接收中断
#endif
将串口文件配置好后,可以在主函数中写下发送数据,电脑端查看是否发送成功:
#include "stm32f10x.h"
#include "usart.h"
int main()
{
void USART1_Config(); //串口1配置,PA9-TX_PA10-RX
printf("%d\n",666); //通过printf发送数据666
while(1)
{
}
}















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









