






前言
MPU6050六轴陀螺仪常用的外围电路设计分析
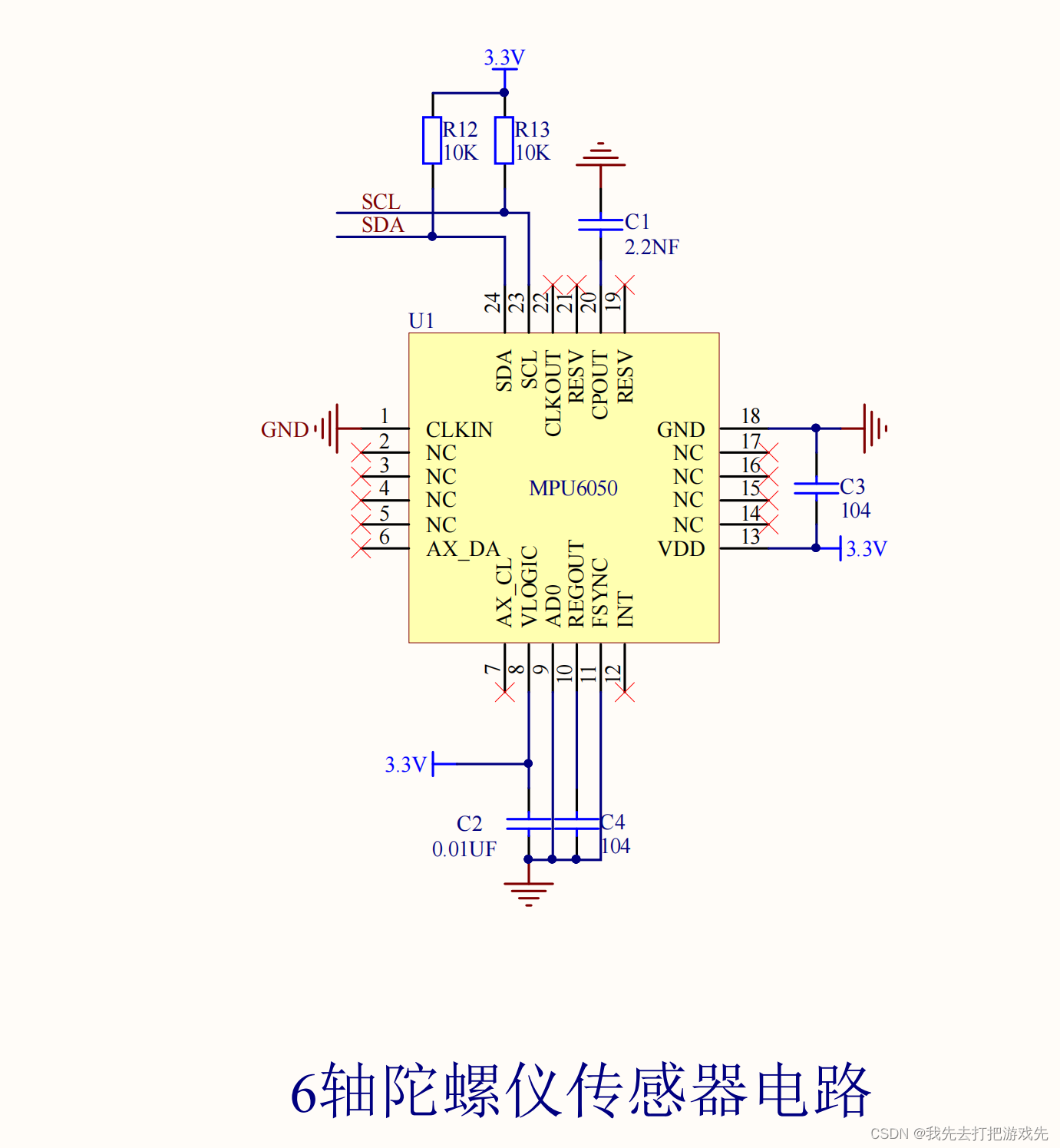
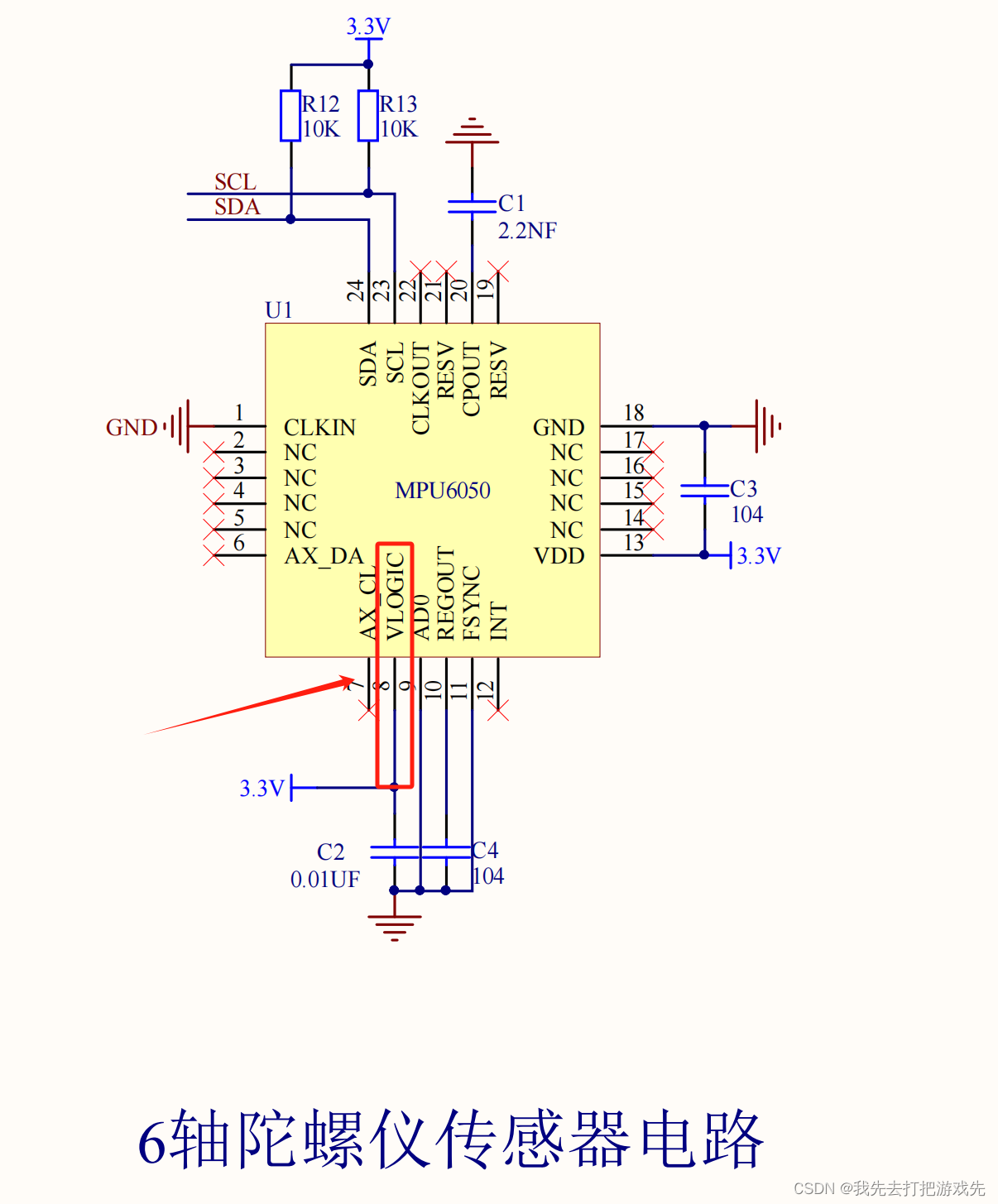
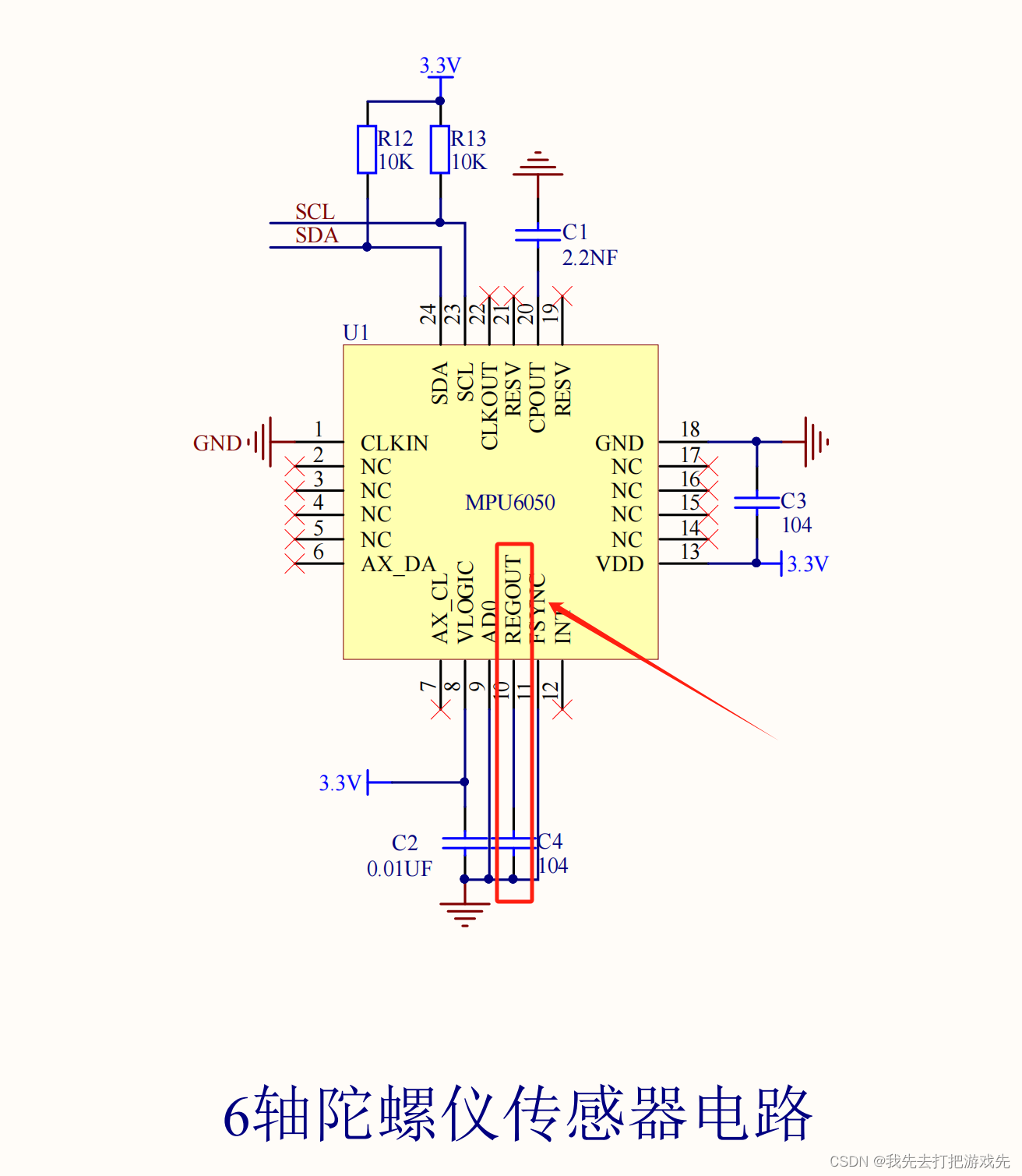
MPU6050六轴陀螺仪外围电路
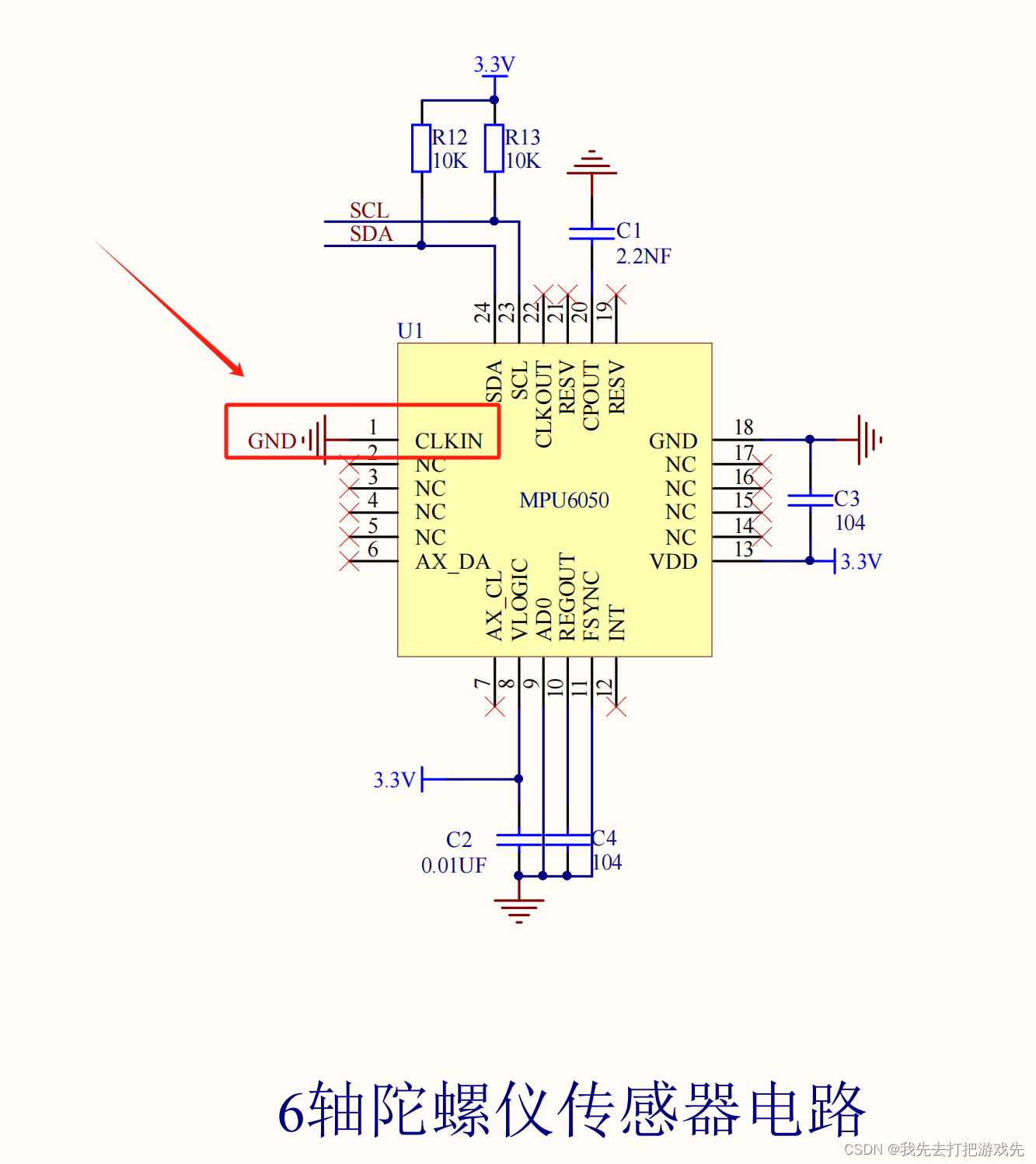
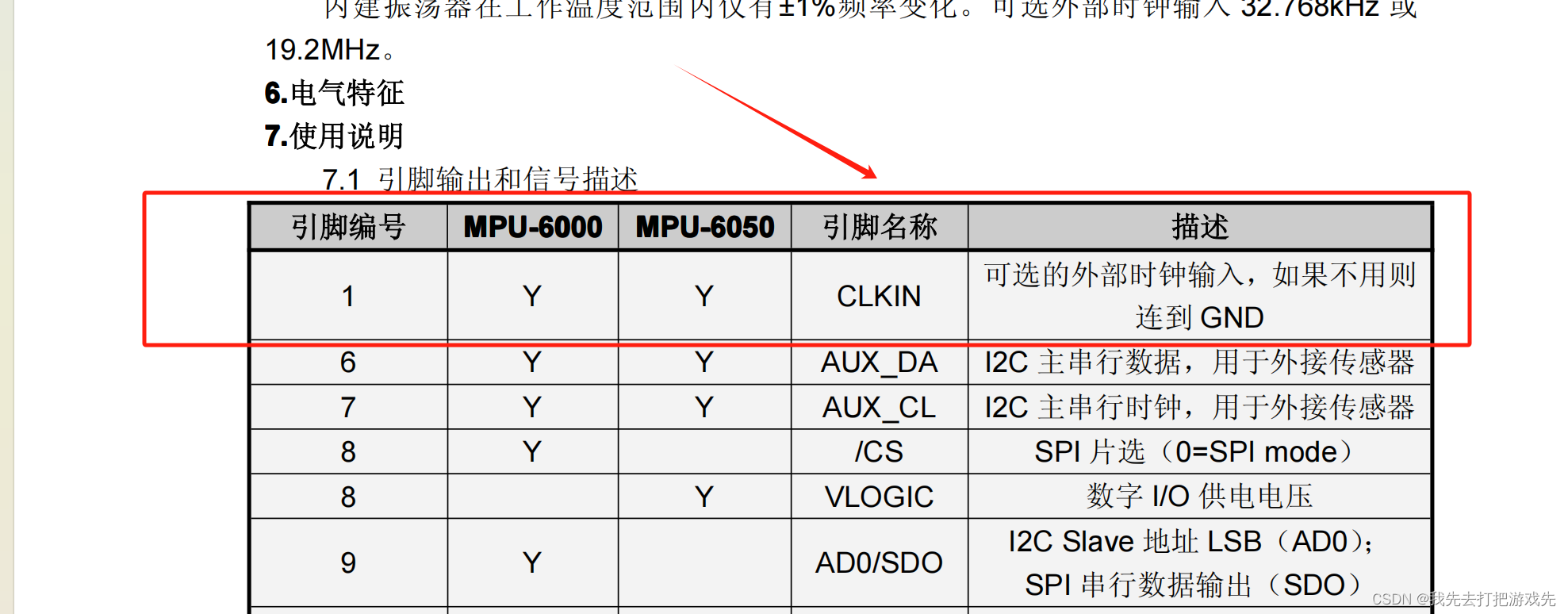
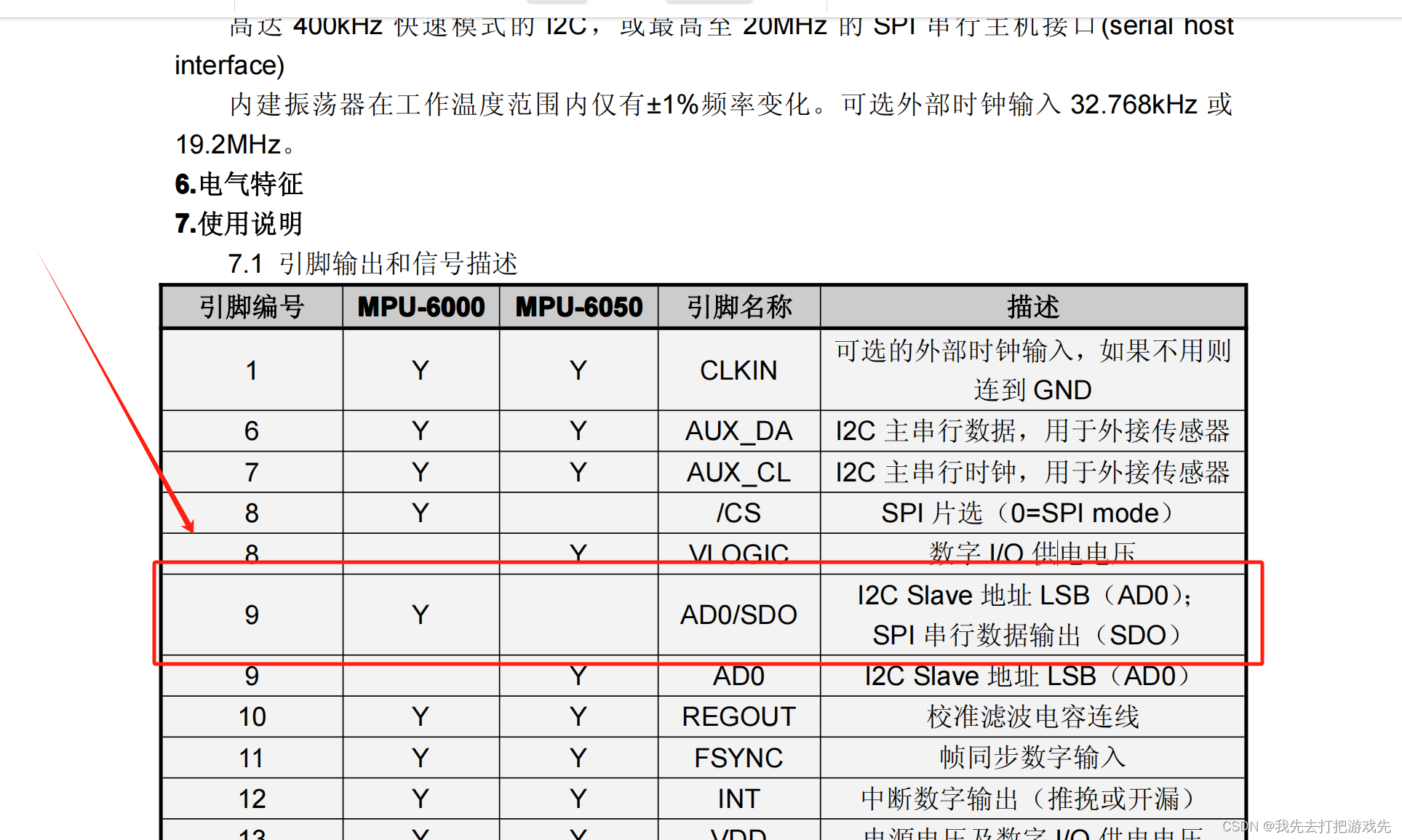
1、首先是1号引脚,一号引脚是CLKIN,可以接外部的时钟输入,如果不使用的话则接GND
使用手册描述:
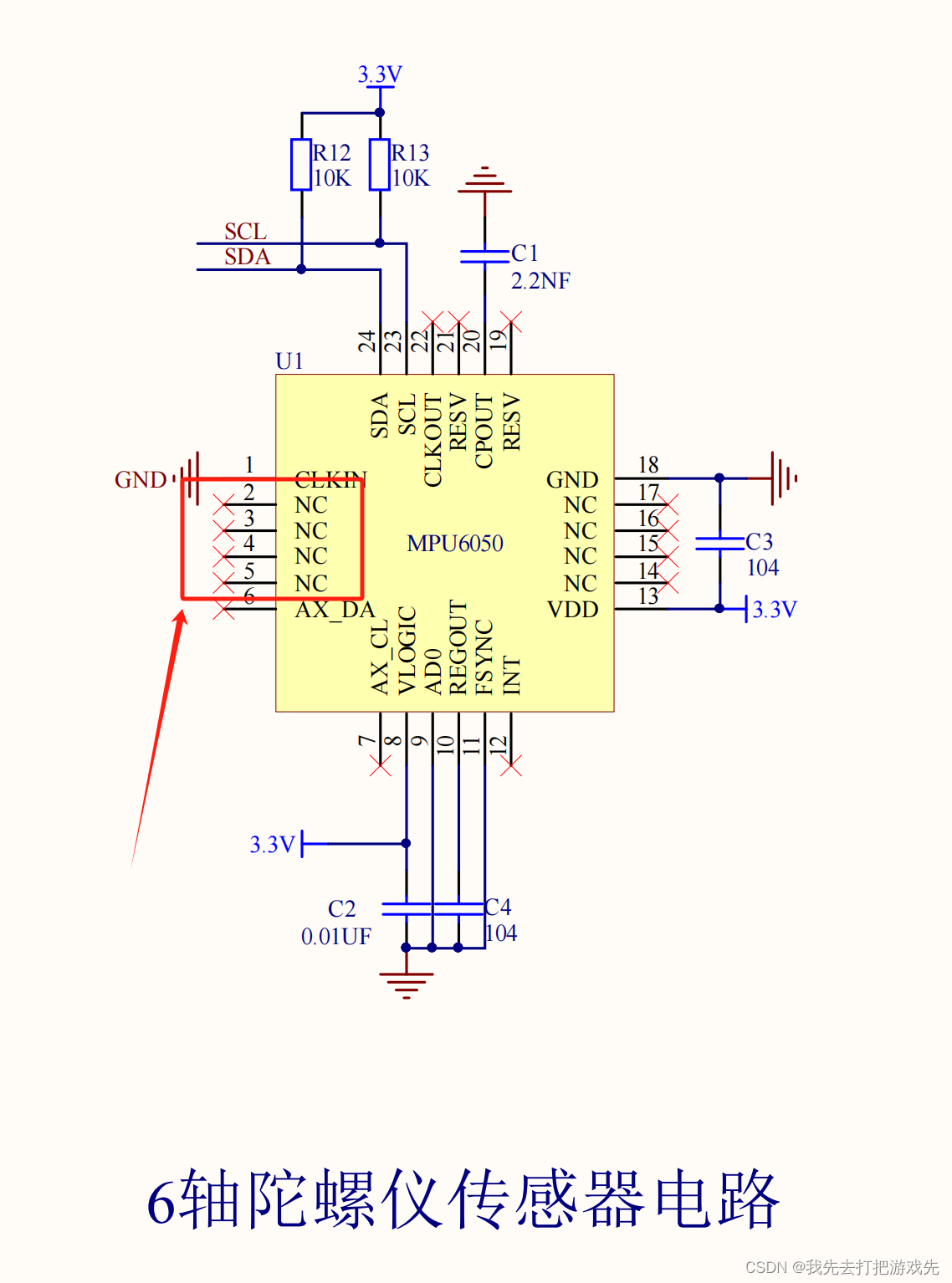
2、二号到五号引脚为NC,在电子原理图中,“NC"代表"Not Connected”,即未连接。这意味着该引脚没有与任何电路元件或信号线连接。通常在原理图中使用"NC"标记来表示某个引脚没有被使用,或者被保留以备将来的扩展使用。
3、六号和七号引脚为AX_DA,AX_CL分别为辅助数据引脚和辅助时钟引脚,用来跟外部传感器进行通信。
AUX_DA引脚:用于传输辅助数据。通过该引脚,MPU6050可以与外部设备或其他传感器进行数据交换。可以将其他传感器(如磁力计)连接到AUX_DA引脚,以获取额外的数据或实现其他特殊功能。
AUX_CL引脚:用于提供辅助时钟信号。MPU6050可以通过该引脚向外部设备提供时钟信号,用于同步数据传输或其他时序相关的操作。

使用手册描述:

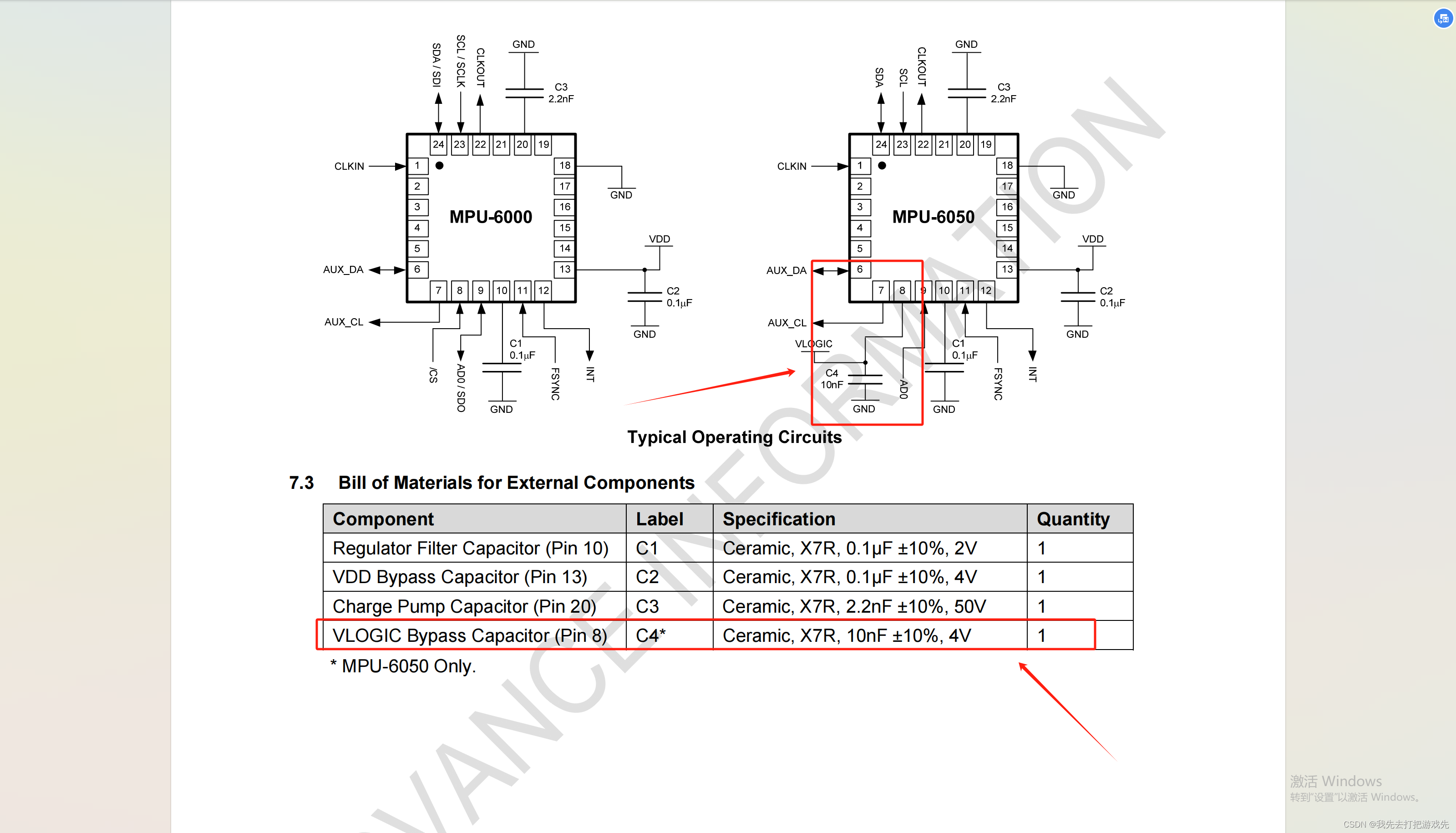
4、八号引脚为VLOGIC,VLOGIC引脚是MPU6050的逻辑引脚电压供应引脚。MPU6050是一款3.3V逻辑电平芯片,VLOGIC引脚需要连接到3.3V的电源电压,以提供正确的逻辑电平给芯片的内部逻辑电路。VLOGIC引脚的电压应与VDD引脚连接的电源电压相匹配,以保证数据传输和通信的可靠性。
电路设计:
根据手册的示例,该引脚在接了3.3V的逻辑电源后,还需接一个10nF的电容再接GND,10nF就是0.01uF
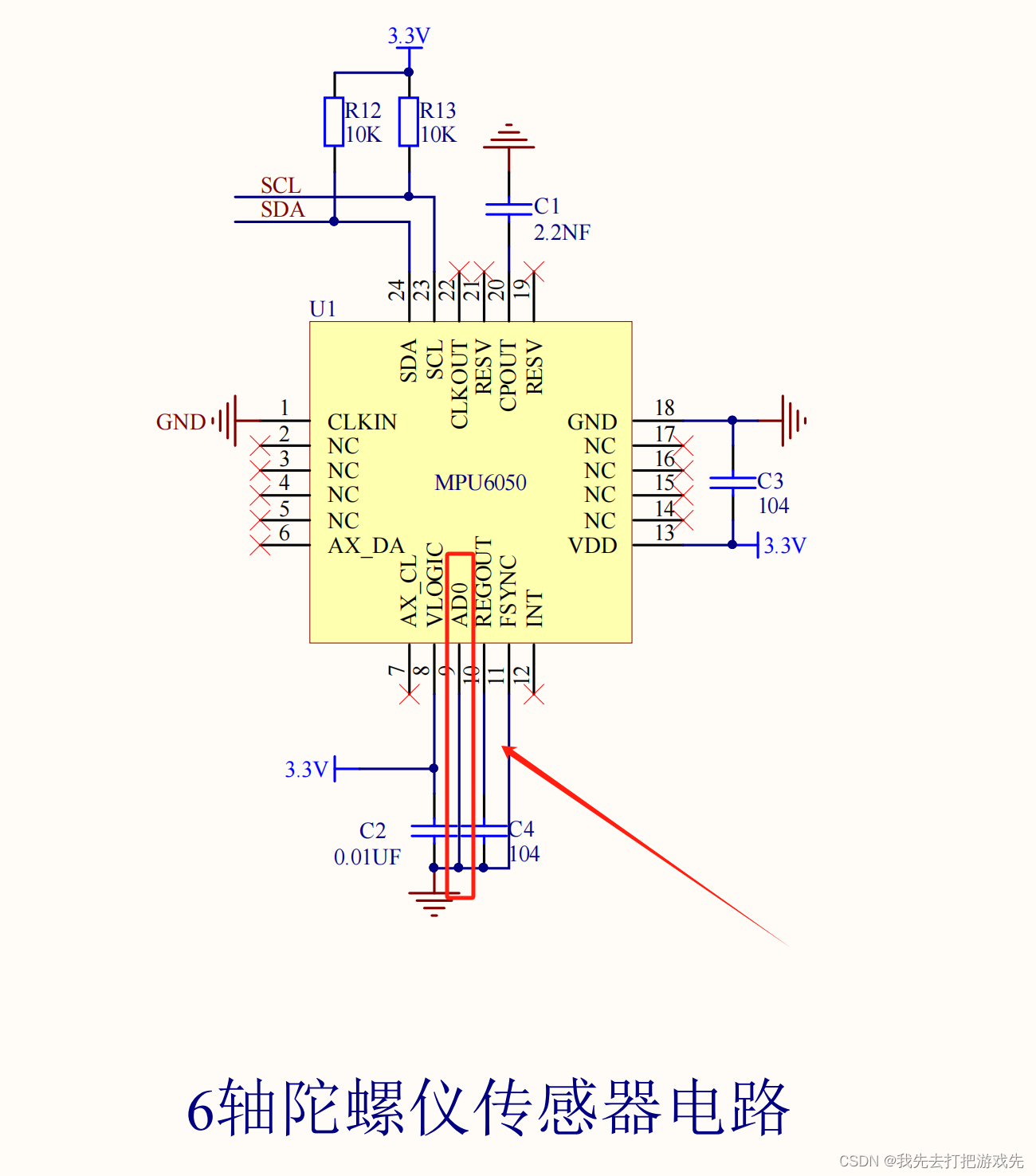
5、九号引脚AD0,该引脚可以设置MPU6050的IIC地址,通过将AD0引脚连接到电源电压或地线上,可以改变MPU6050的I2C地址,以便与其他I2C设备进行通信时避免地址冲突。
AD0引脚有两个可能的连接方式:
-
接GND:这将使MPU6050的I2C地址为默认地址,通常是0x68。
-
接高电平:这将使MPU6050的I2C地址变为另一个预定义地址,通常是0x69。
在上示原理图中,我们接了GND,故此时MPU6050的地址为0X68。
手册描述:
6、十号引脚REGOUT,校准滤波电容引脚,用来连接一个校准滤波电容
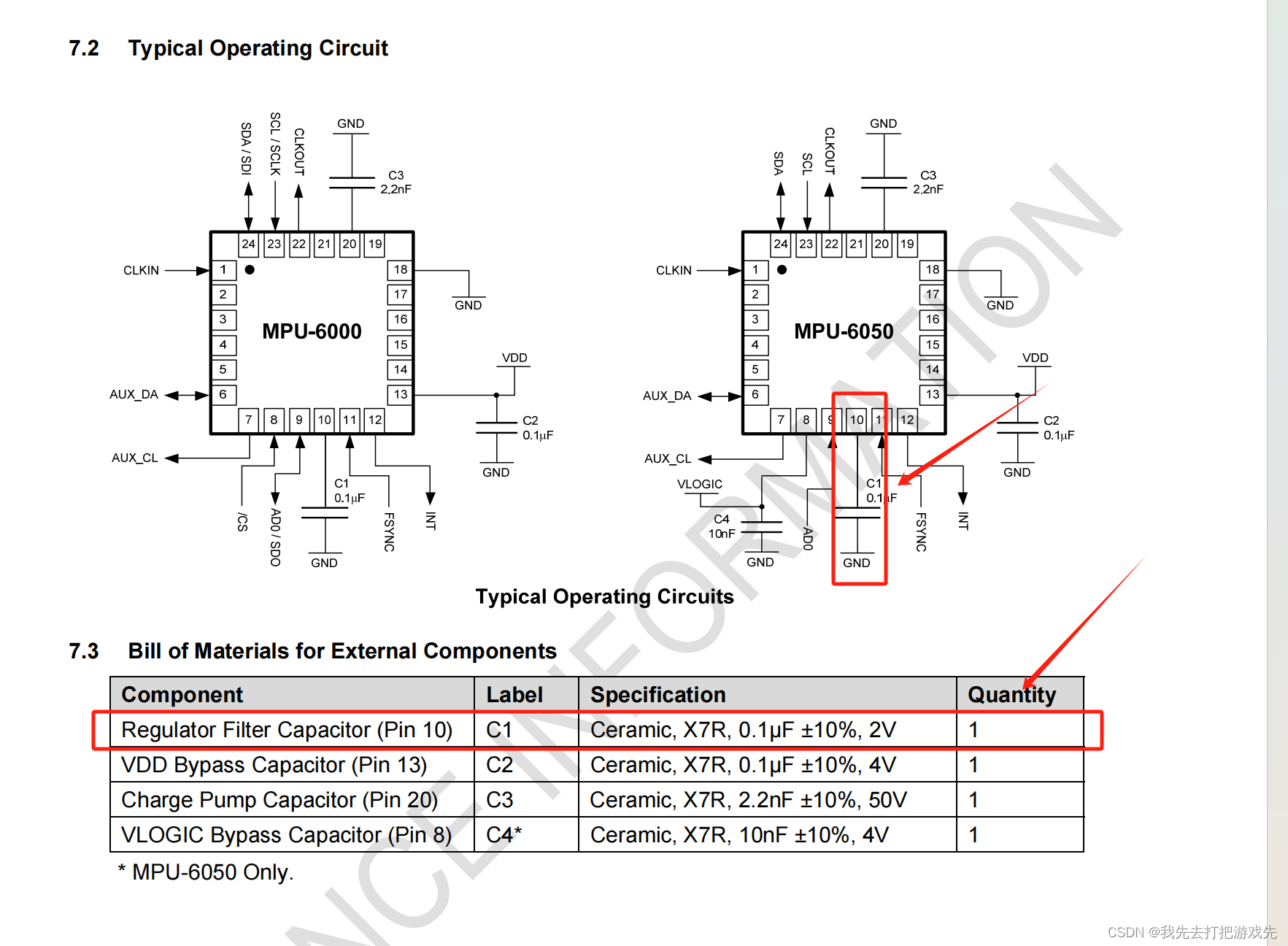
使用手册描述:

电路设计示例:
手册上给出的示例是该引脚连接一个0.1uF的电容
7、十一号引脚FSYNC,它有两个主要的作用:
-
帧同步(Frame Synchronization):FSYNC引脚可以用于将MPU6050的传感器输出与外部系统进行同步。通过连接一个外部的时钟信号到FSYNC引脚,您可以确保MPU6050的数据输出与外部系统的时序一致。这对于需要精确同步的应用场景非常有用,例如在惯性导航系统中。
-
数据传输触发(Data Transfer Trigger):MPU6050芯片可以通过I2C或SPI接口与主控制器进行通信。当FSYNC引脚连接到外部系统时,在一些特定的配置下,FSYNC引脚的电平变化可以触发数据的传输。例如,可以将FSYNC引脚连接到中断引脚,以在新的传感器数据可用时触发主控制器进行数据的读取。
-
MPU6050的FSYNC引脚是一个可选引脚,并不是必须连接的。在大多数应用中,FSYNC引脚可以保持未连接状态,使用默认的配置即可,像在本例中,FSYNC引脚并未使用,直接接到GND去了。
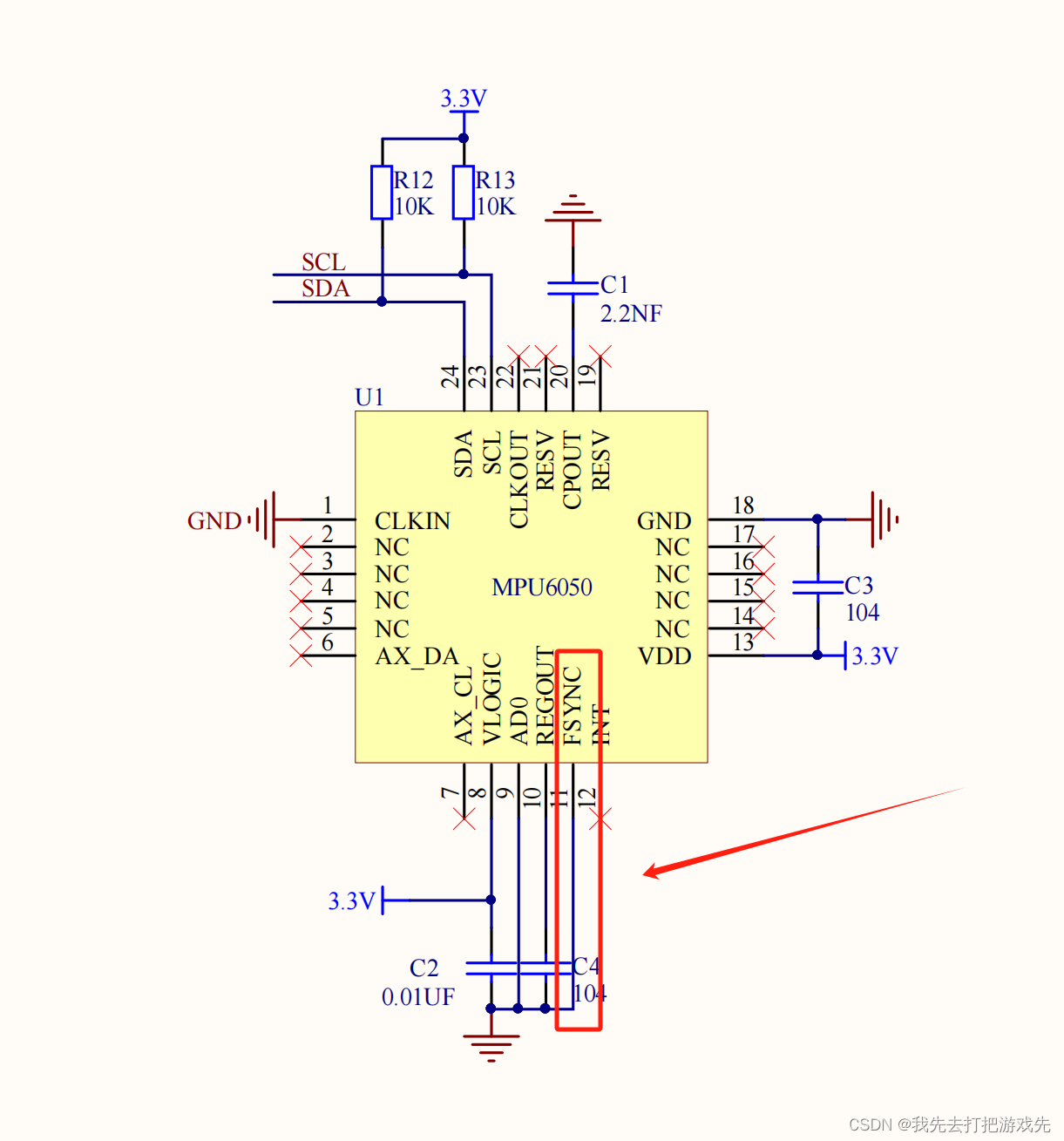
手册描述:

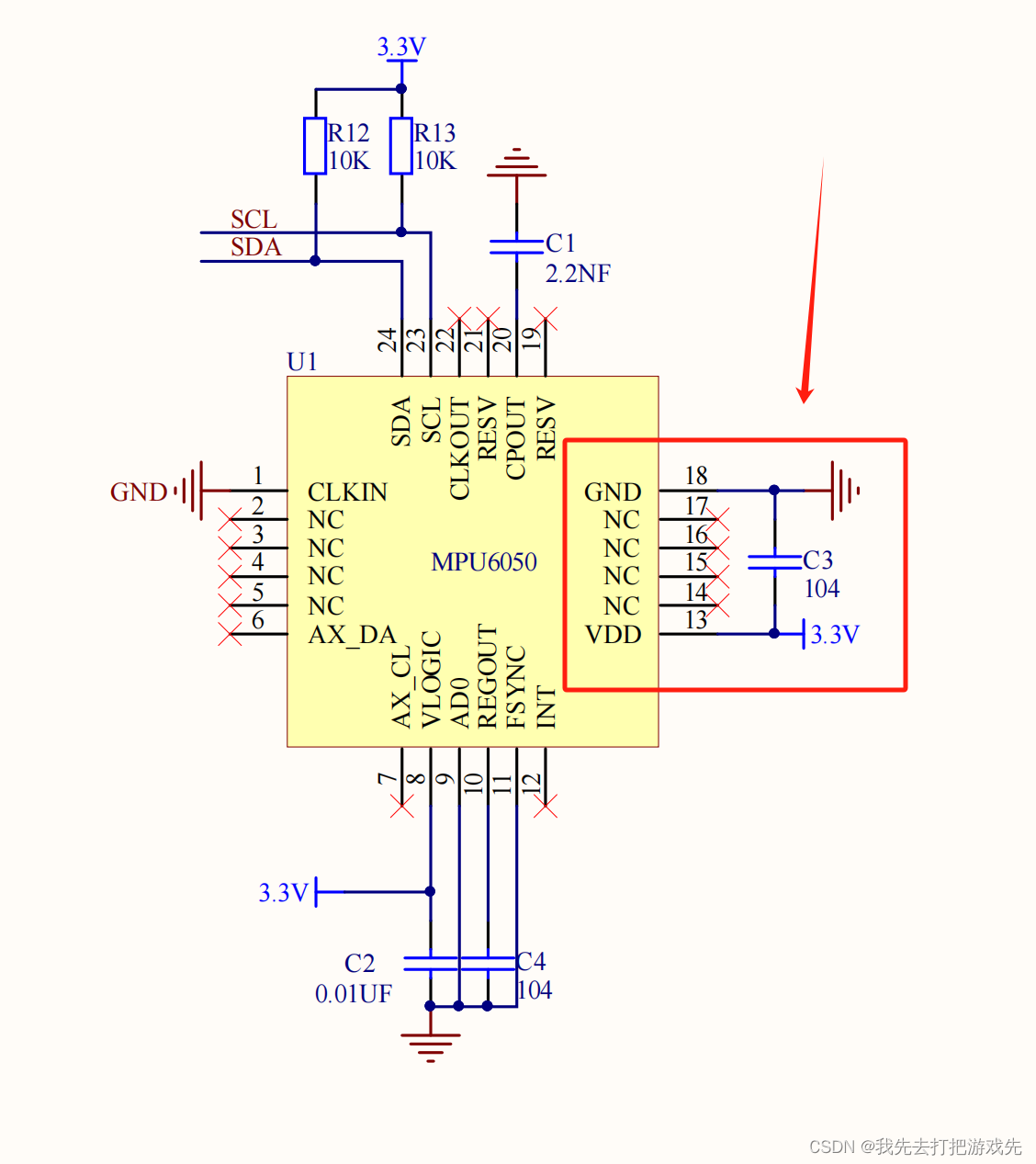
8、十三和十八号引脚分别是VDD和GND,VDD引脚是用于提供电源供应的引脚,需要注意的是VDD引脚是用于提供主要电源电压的引脚,VLOGIC引脚是用于提供逻辑电平的引脚,这两者是有区别的,但我们平时使用时VDD、VLOGIC一般都接3.3V,VDD引脚上接一个104电容再接地的作用是为了滤除电源线上的噪声和稳定电源电压
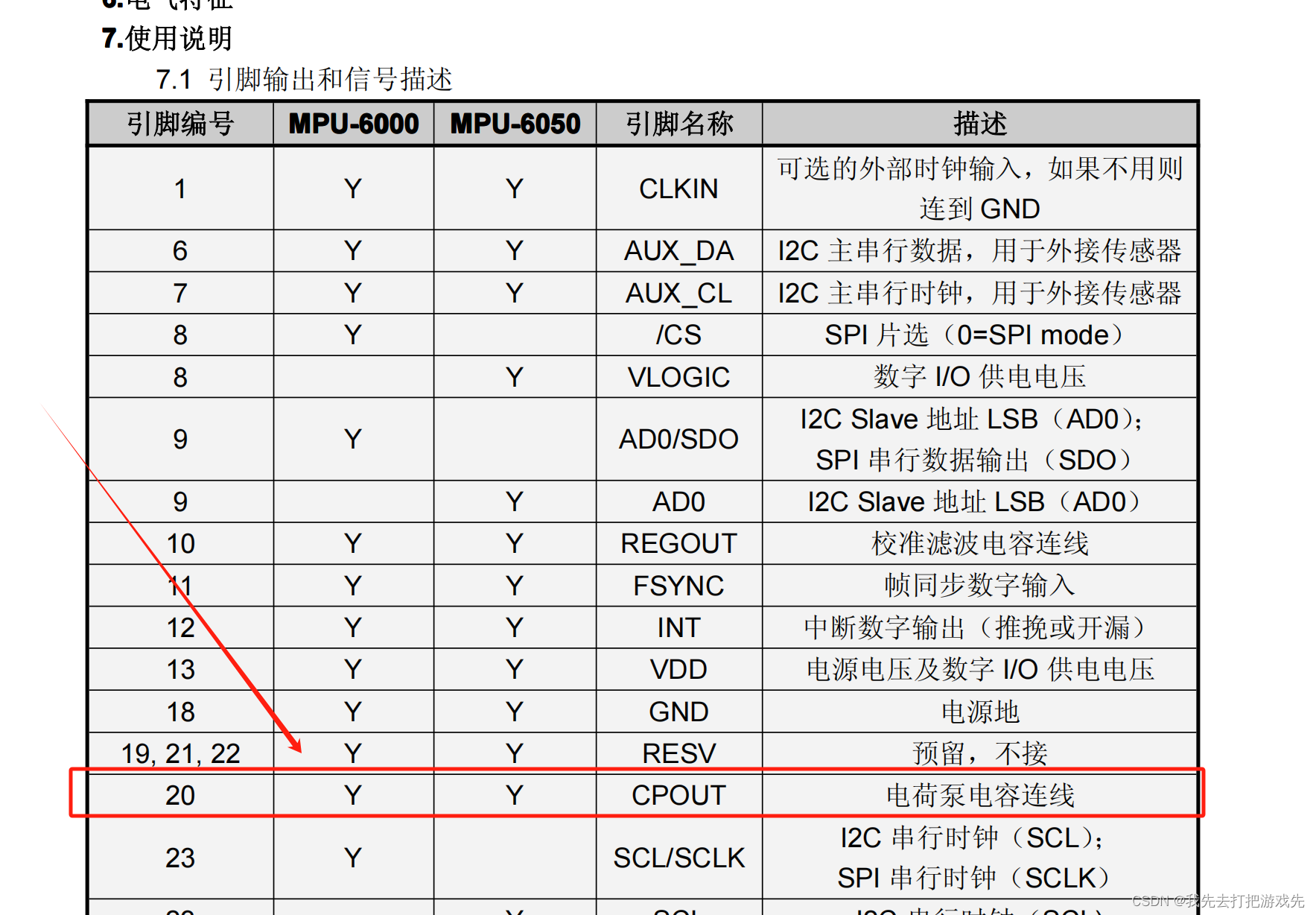
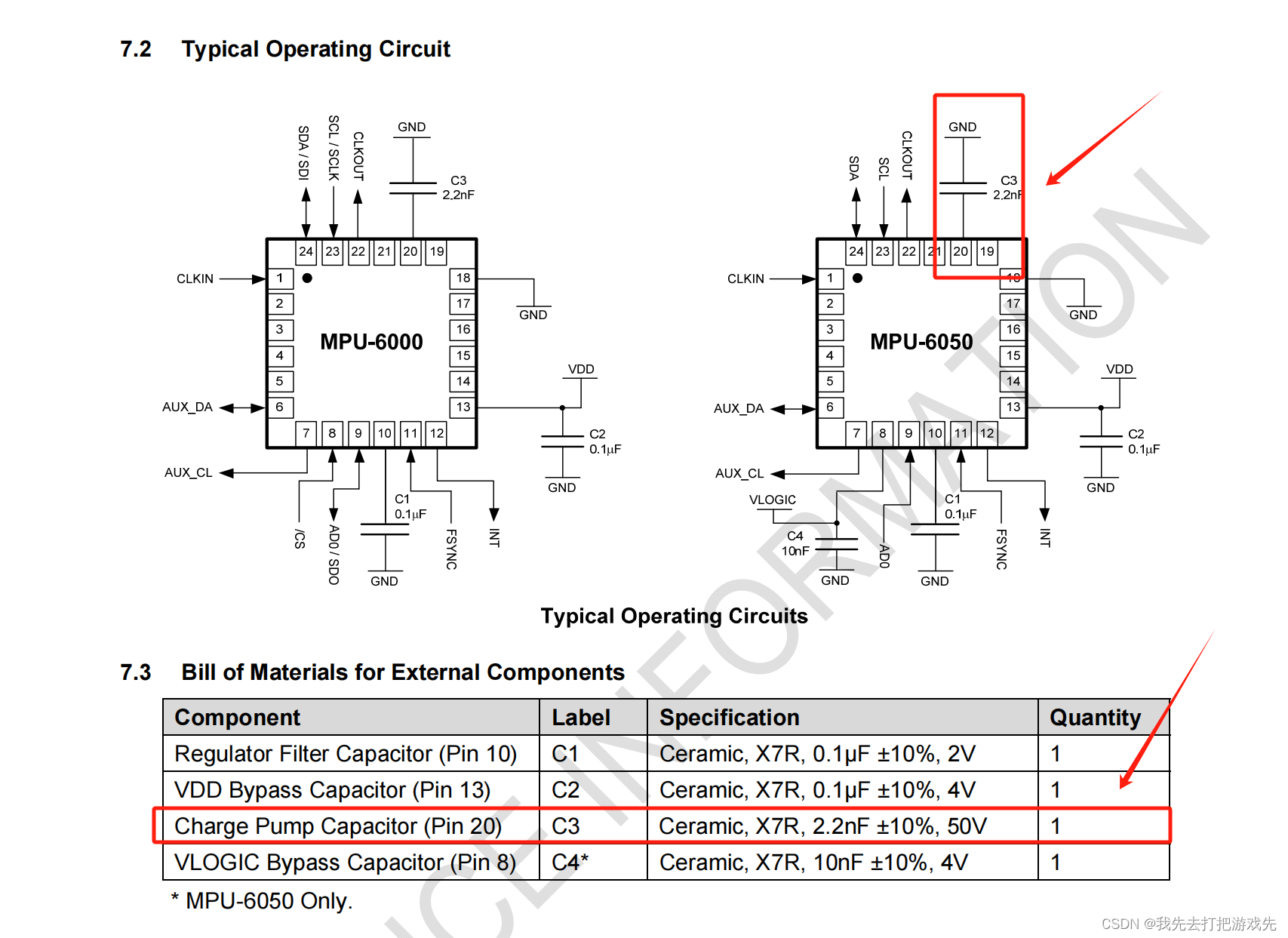
9、二十号引脚CPOUT,用来连接电荷泵电容,依据手册电路设计示例,连接一个2.2nF的电容再接地即可
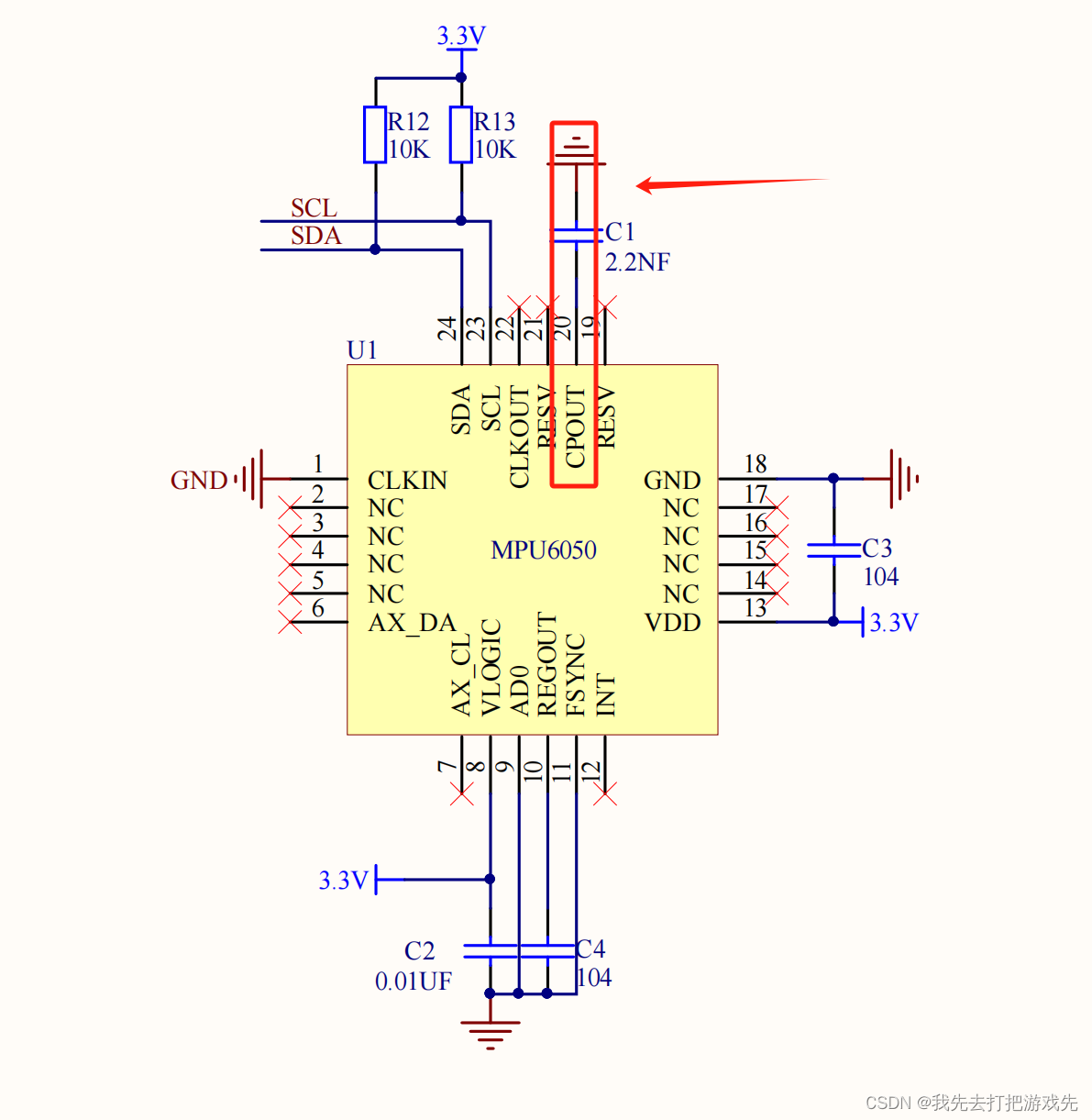
手册描述:
电路设计示例:
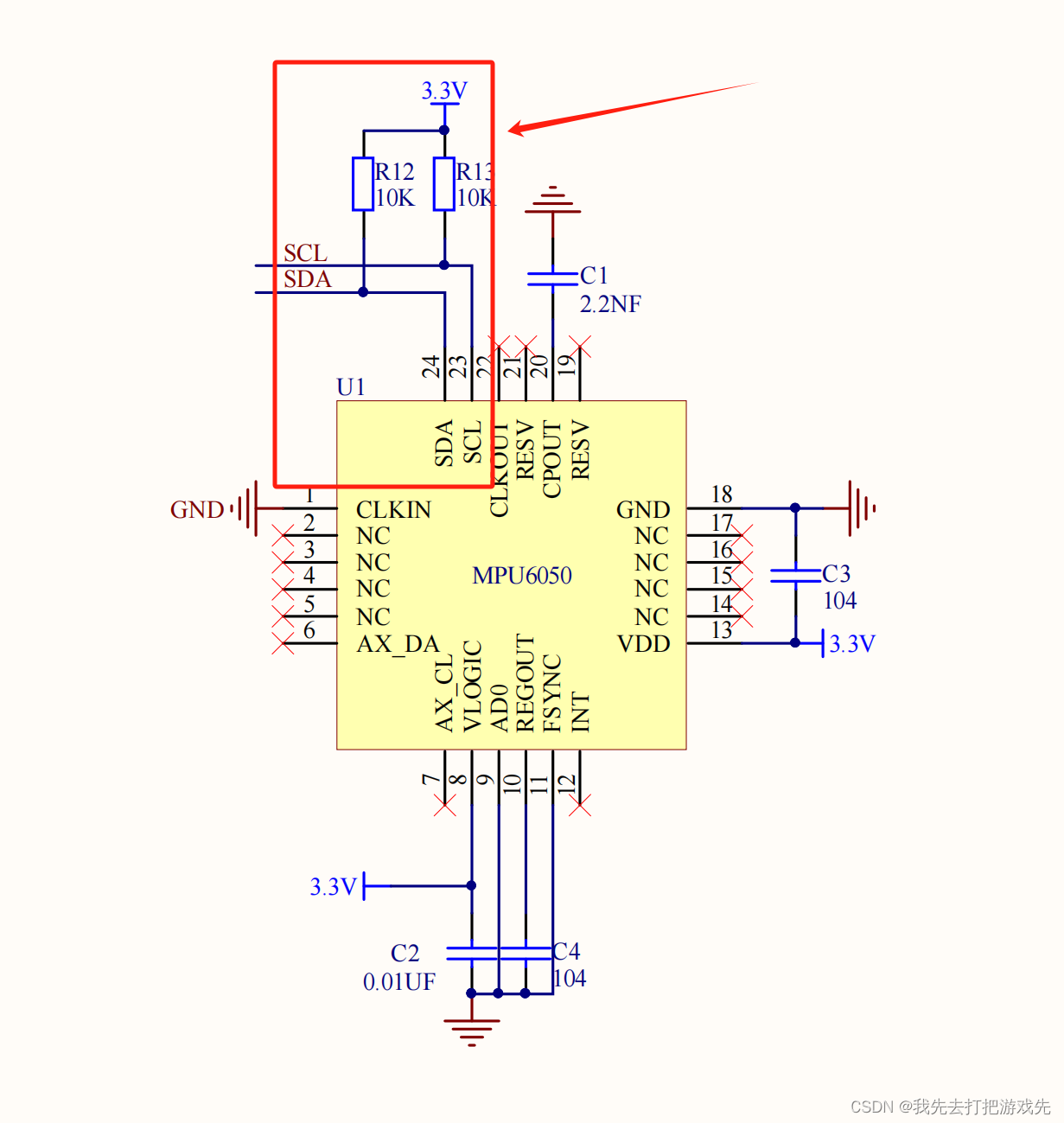
10、二十三号引脚跟二十四号引脚分别是IIC通信的SCL跟SDA,IIC通信中,将SCL(时钟线)和SDA(数据线)接上拉电阻的作用是确保信号在传输过程中的稳定性和可靠性,为了提供线路的默认高电平状态。


















 1176
1176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











