







前言
使用rqt_robot_steering软件包控制ros小乌龟移动速度
一、打开终端
二、输入sudo apt install ros-noetic-rqt-robot-steering,然后回车,输入管理员密码,然后回车,软件包安装成功(图示是已安装过)
三、另开一个终端,输入roscore,启动ROS核心
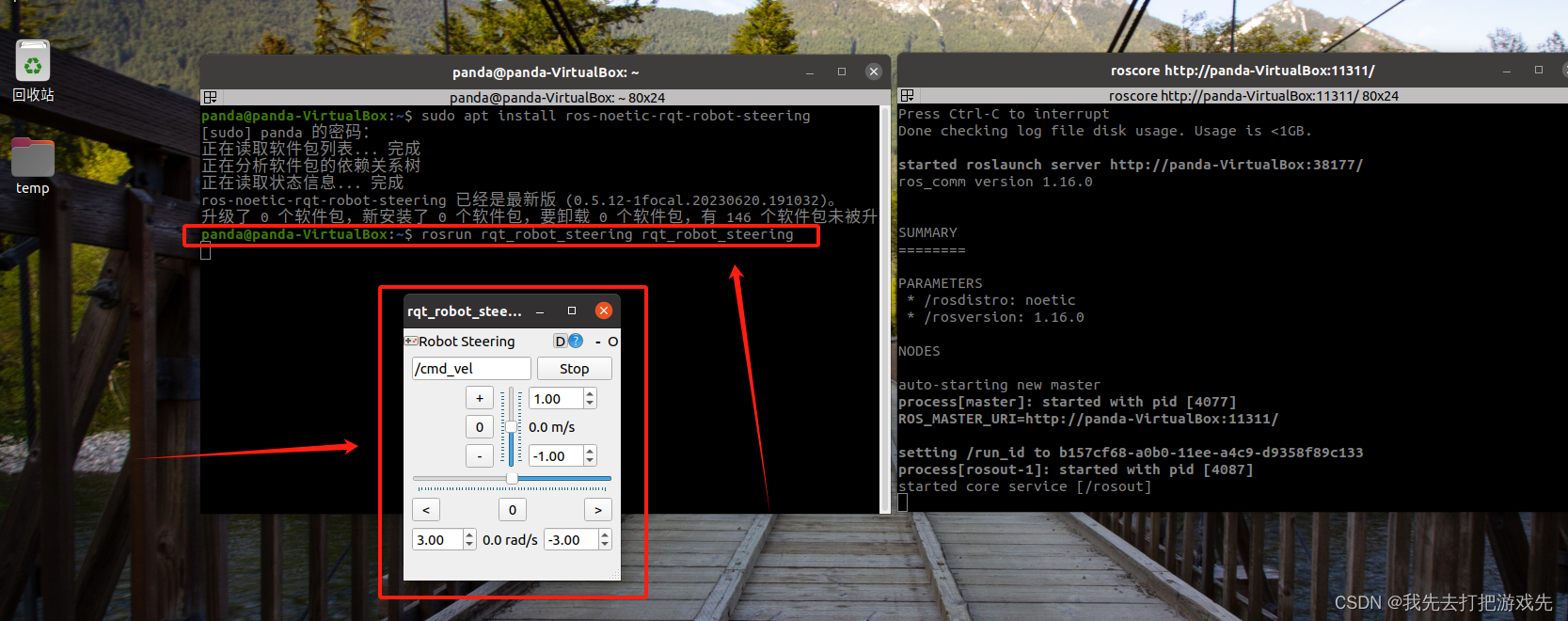
四、回到刚刚第一个下载软件包的终端,输入rosrun rqt_robot_steering rqt_robot_steering,回车后就会弹出一个软件
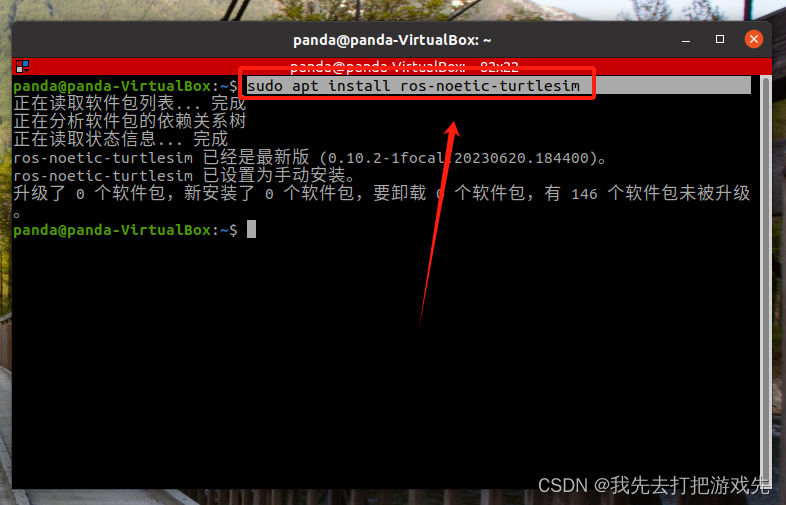
五、再开另一个终端,输入sudo apt install ros-noetic-turtlesim安装小乌龟,我这里是已安装过
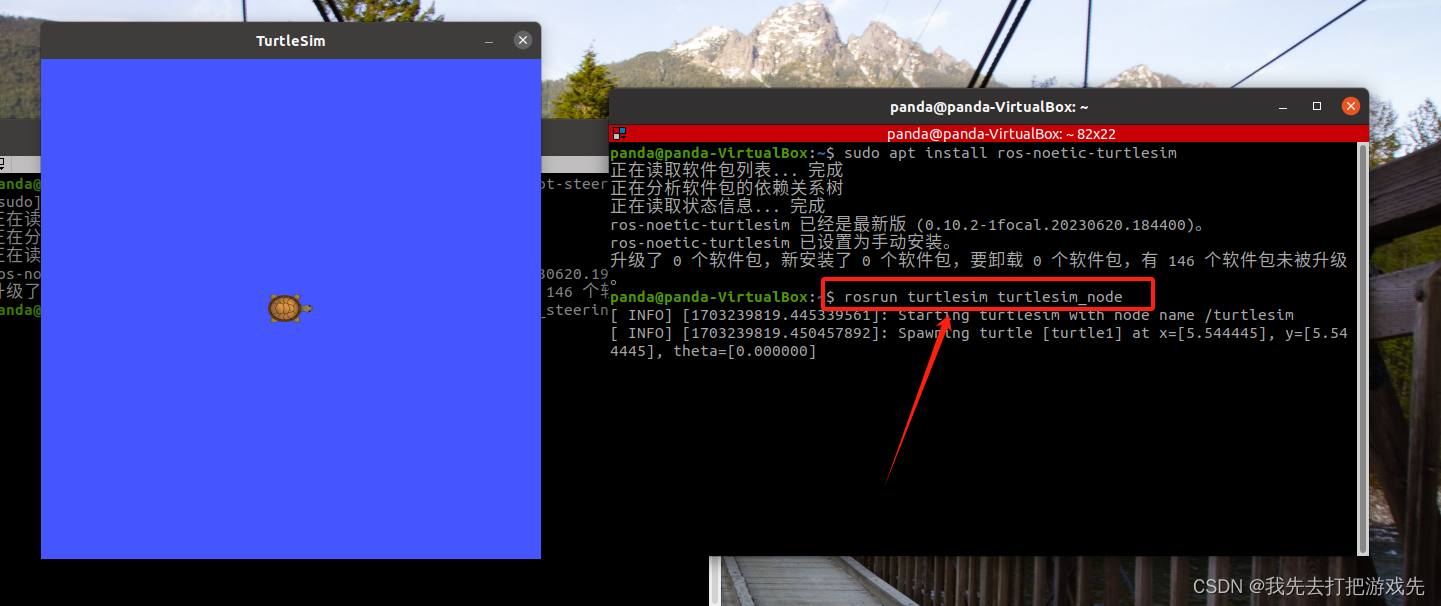
六、在刚刚安装小乌龟的那个终端输入rosrun turtlesim turtlesim_node,回车后就会弹出小乌龟的窗口
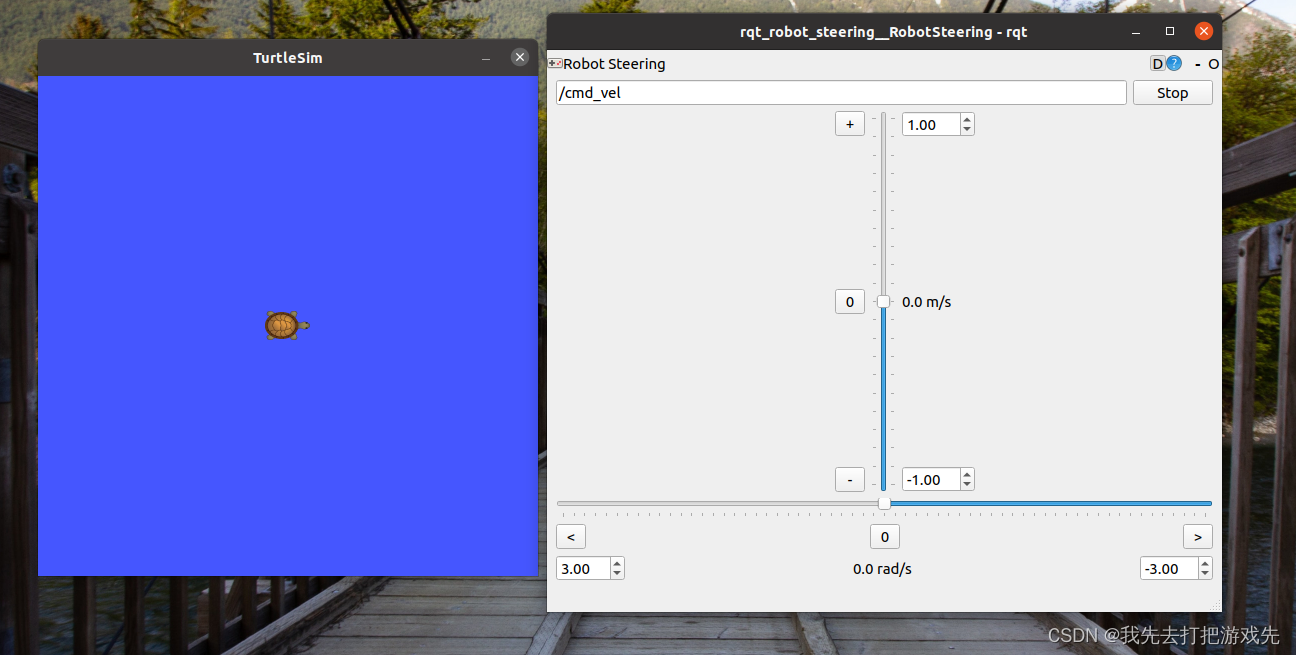
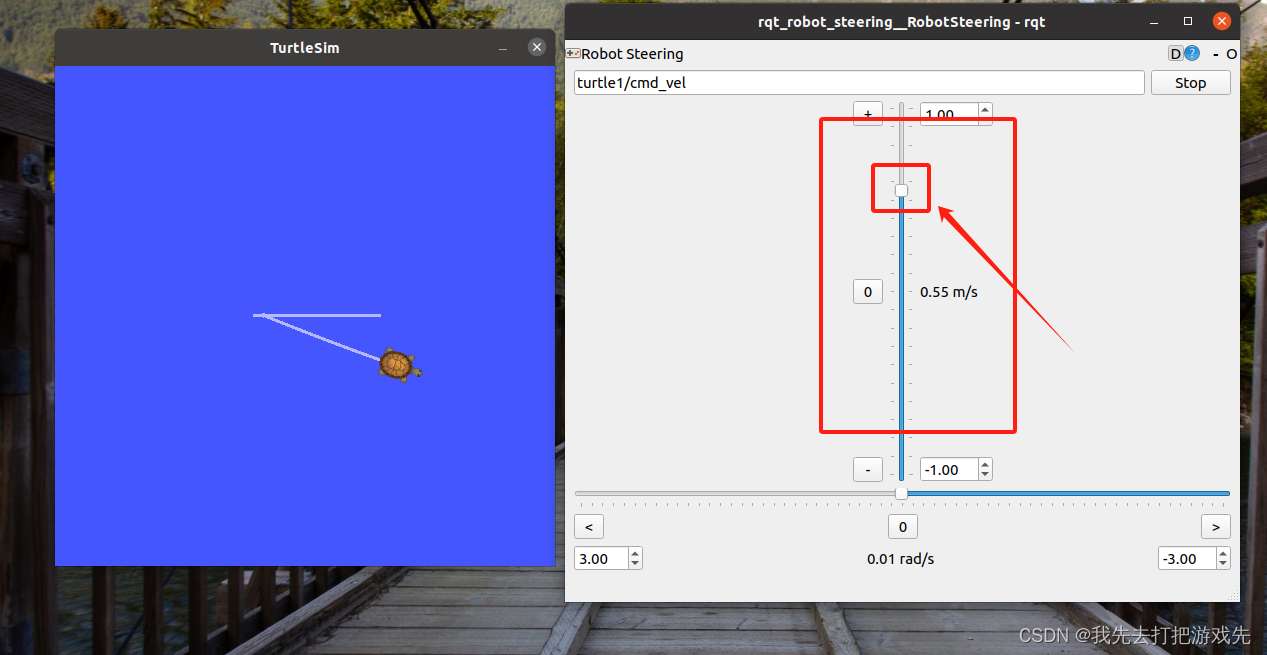
七、这是我们前面打开的了两个软件,左边是小乌龟,右边是控制小乌龟速度的软件
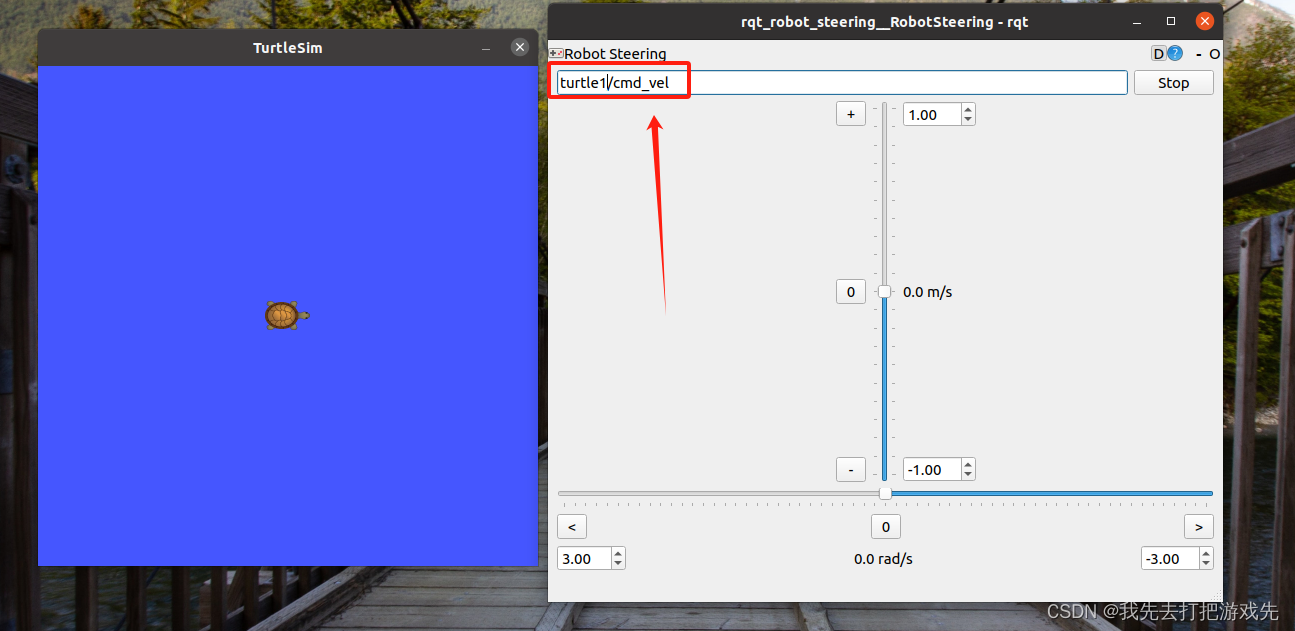
八、修改一下速度发送的主题名称,在前面加了个turtle1
九、拖动这个摇杆,小乌龟前后动
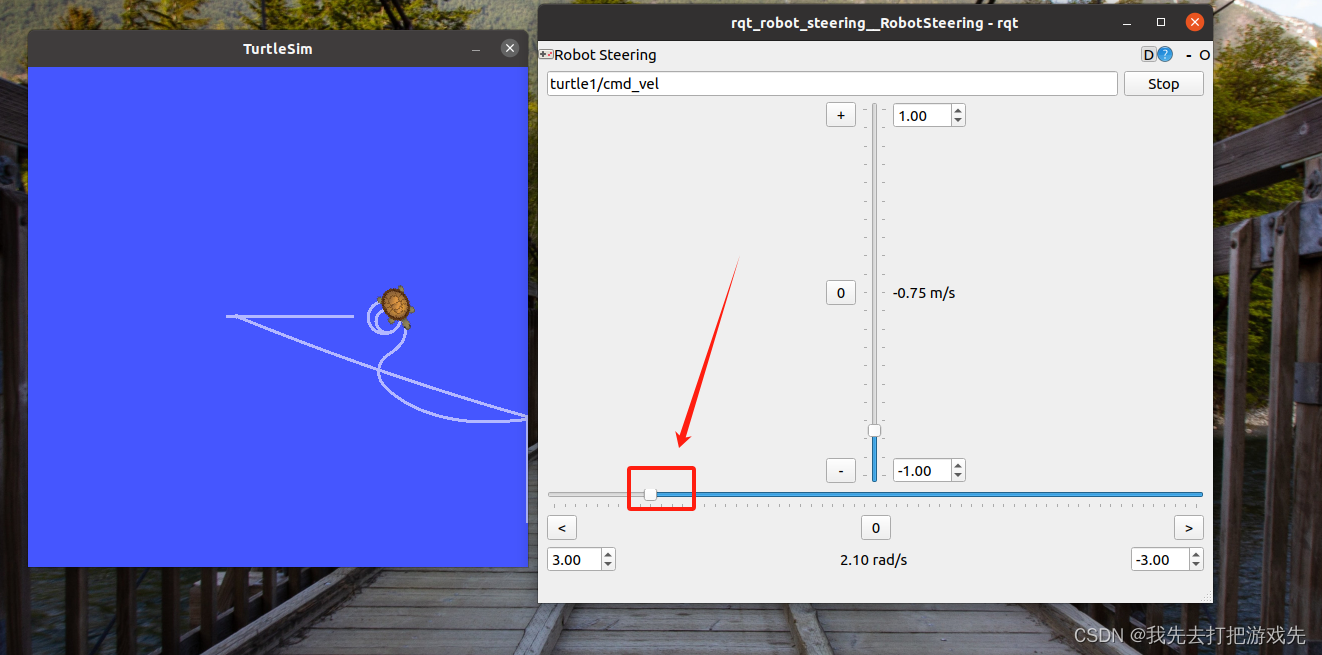
十、拖动这个摇杆,小乌龟能转圈圈
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











