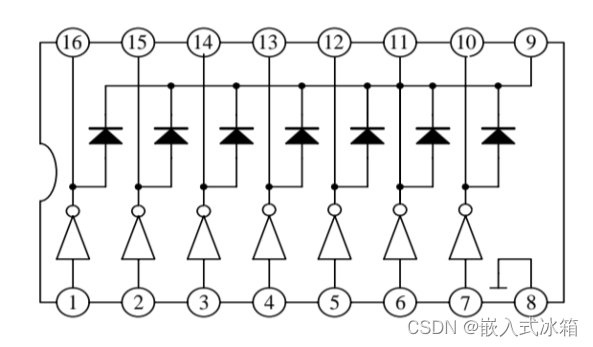
步进电机驱动的实现可以采用28BYJ-48步进电机驱动板,驱动板上自带 ULN2003 驱动芯片,可以方便地使用基于 STM32 的控制器进行控制。在使用 STM32 HAL 库驱动步进电机时,可以按照以下步骤进行:
1. 初始化 GPIO 端口和定时器。在 HAL 库中,可以使用 HAL_GPIO_Init 和 HAL_TIM_Base_Init 函数进行初始化。
2. 配置 GPIO 端口的输出模式,设置为推挽输出模式。可以使用 HAL_GPIO_WritePin 函数将 GPIO 端口输出设置为高电平或低电平,从而控制步进电机的转向。
3. 配置定时器的计数值和分频值,以控制步进电机的速度。可以使用 HAL_TIM_Base_Start_IT 函数启动定时器,以产生中断并控制步进电机的转动。
4. 在定时器中断服务函数中,根据步进电机的转向和步长控制 GPIO 端口的输出状态,从而实现步进电机的正转、反转和速度控制。
下面是一个示例代码,可以实现控制28BYJ-48步进电机的正转、反转和速度控制功能:
```c
#include "stm32f1xx_hal.h"
#define STEPPER_PORT GPIOA
#define STEPPER_IN1_PIN GPIO_PIN_0
#define STEPPER_IN2_PIN GPIO_PIN_1
#define STEPPER_IN3_PIN GPIO_PIN_2
#define STEPPER_IN4_PIN GPIO_PIN_3
#define STEPPER_SPEED 1000
TIM_HandleTypeDef htim2;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim);
void stepper_forward(void);
void stepper_reverse(void);
void stepper_stop(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_Base_Start_IT(&htim2);
while (1)
{
stepper_forward();
HAL_Delay(2000);
stepper_reverse();
HAL_Delay(2000);
}
}
void stepper_forward(void)
{
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN1_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN4_PIN, GPIO_PIN_RESET);
}
void stepper_reverse(void)
{
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN1_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN4_PIN, GPIO_PIN_SET);
}
void stepper_stop(void)
{
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN1_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN4_PIN, GPIO_PIN_RESET);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM2)
{
static int step = 0;
static int dir = 1;
if (dir == 1)
{
switch (step)
{
case 0:
stepper_forward();
break;
case 1:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN1_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_SET);
break;
case 2:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN4_PIN, GPIO_PIN_SET);
break;
case 3:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_SET);
break;
default:
break;
}
}
else
{
switch (step)
{
case 0:
stepper_reverse();
break;
case 1:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_SET);
break;
case 2:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN1_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN2_PIN, GPIO_PIN_SET);
break;
case 3:
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN3_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(STEPPER_PORT, STEPPER_IN4_PIN, GPIO_PIN_SET);
break;
default:
break;
}
}
step += dir;
if (step >= 4)
{
step = 0;
}
else if (step < 0)
{
step = 3;
}
TIM2->ARR = STEPPER_SPEED;
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK |
RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / 1000);
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
static void MX_TIM2_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7200 - 1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = STEPPER_SPEED;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim2);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = STEPPER_IN1_PIN | STEPPER_IN2_PIN | STEPPER_IN3_PIN | STEPPER_IN4_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(STEPPER_PORT, &GPIO_InitStruct);
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_InitStruct;
if (htim->Instance == TIM2)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA1 ------> TIM2_CH2
*/
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
void Error_Handler(void)
{
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif
```
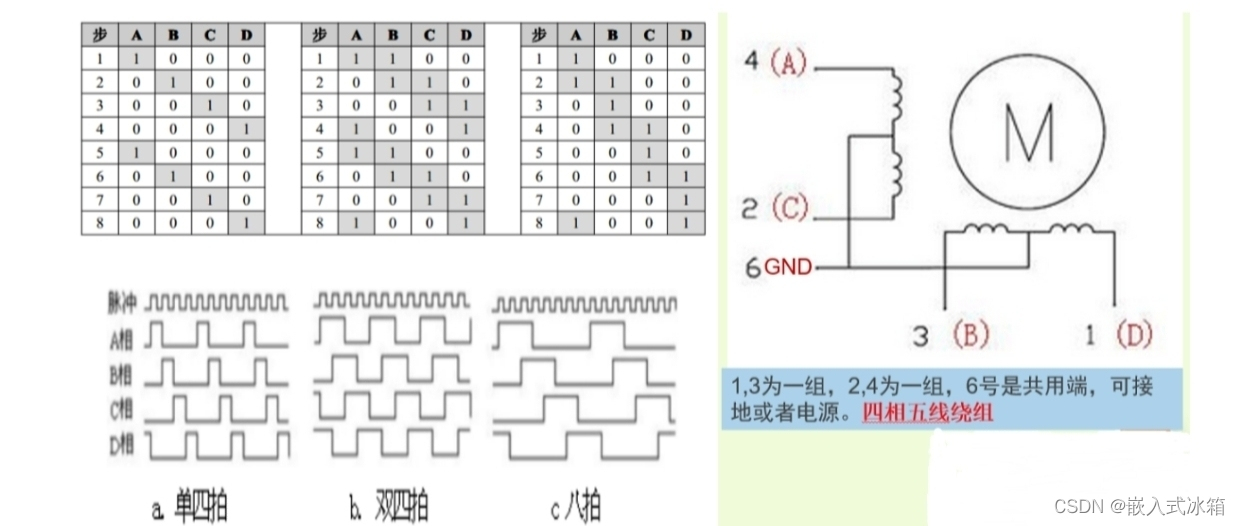
需要注意的是,步进电机的控制需要按照一定的步序进行,因此在定时器中断服务函数中需要控制每一步的输出状态,从而实现步进电机的正转、反转和速度控制。在上述代码中,步进电机的控制采用了半步控制方式,可以根据需要进行调整。







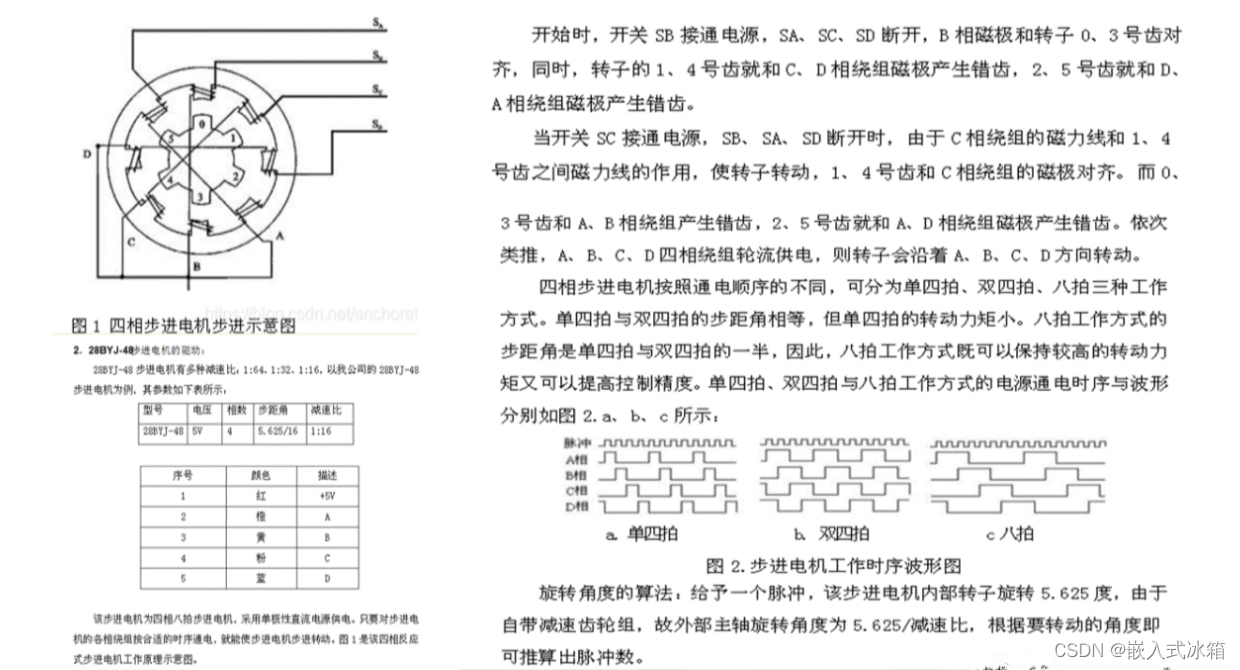 28BYJ-48步进电机参数
28BYJ-48步进电机参数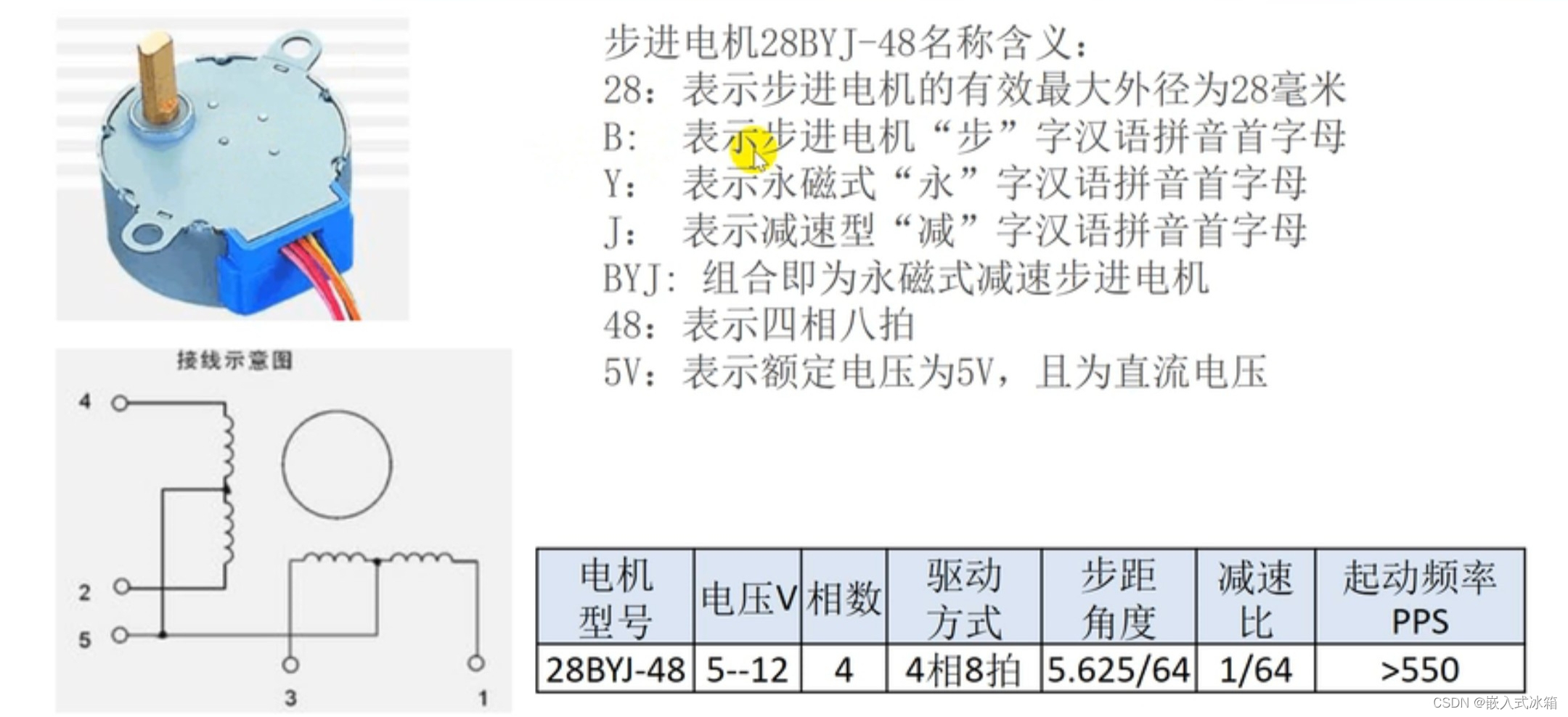
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











