



文章目录
前言
之前博客中的延时功能都是通过循环、delay/Hal_delay函数等实现,本次博客通过定时器Timer方式实现时间的精准控制,相当于给CPU上了一个闹钟,CPU平时处理其它任务,当定时时间到了以后,处理定时相关的任务。请设置一个5秒的定时器,每隔5秒从串口发送“hello windows!”;同时设置一个2秒的定时器,让LED等周期性地闪烁。
一、定时器Timer
要实现定时或者延时功能,一般有三种方法:软件定时,不可编程硬件定时,可编程硬件定时。
软件定时——让软件循环执行一段程序,程序本身并无执行目的,而是通过执行程序延时固定的时间,也就是以前的程序中经常使用的延时程序。这种方法降低了cpu的利用率。
不可编程硬件定时——如外部芯片555 时基电路,通过外部阻容,达到一定的延时功能,改变阻容大小可以改变延时长度。这种定时器取决于硬件,设定好以后不能通过软件更改。
可编程定时器——这种定时器的定时值可以通过软件确定和修改,使用灵活便捷。
1.定时器定义
Timer 是一种定时器工具,用来在一个后台线程计划执行指定任务。 它可以安排任务“执行一次”或者定期“执行多次”。 然而在实际的开发过程当中,经常需要一些周期性的操作,比如每5分钟执行某一操作等。定时器是单片机内部的特殊功能模块。在控制系统中,常常要求有一些实时时钟以实现定时或者延时控制,如定时中断、定时检测、定时扫描等等,也往往要求有计数器,对外部事件进行计数。
- 能够对内部时钟信号或外部输入信号进行计数,数值达到设定要求时,向CPU发起中断请求,完成外部程序的运行。
- 本质就是进行计数,选择内部时钟脉冲,作为计数器时,技术信号的来源选择非周期脉冲信号。
2.定时器分类
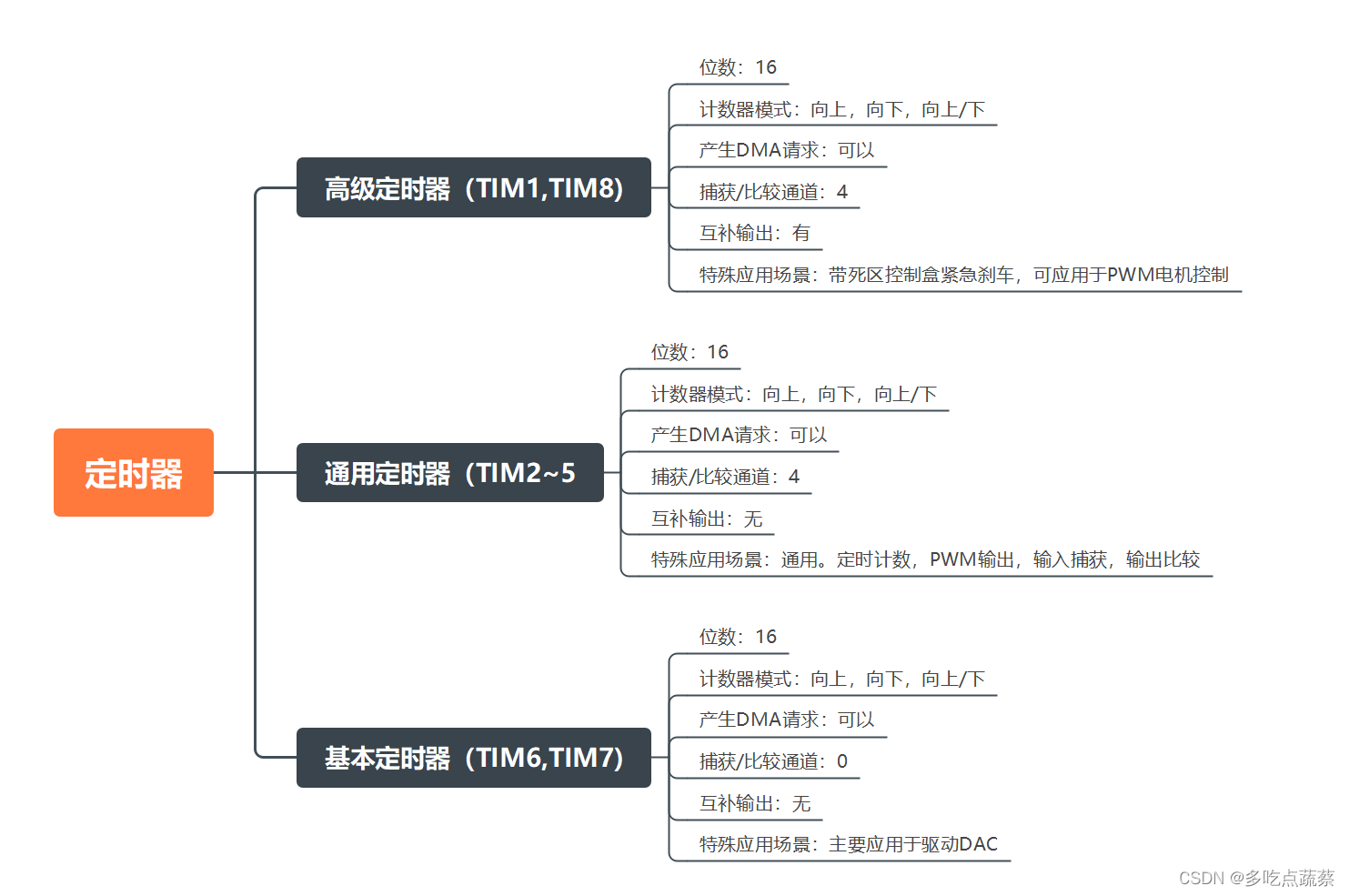
STM32中定时器可分为高级定时器、通用定时器、基本定时器三类,他们都是由一个可编程的16位预分频器(TIMX_PSC)驱动的16位。
- 1、基本定时器:功能最少,只能充当基本的时基,甚至都没有外部引脚
- 2、通用定时器:拥有基本定时器的全部功能,同时有输入捕获模式,用以接收外部的PWM,脉冲之类的信息
- 3、高级定时器:又有通用定时器的全部功能,又有互补输出模式,功能最为强大
3.计数器模式
- 向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
- 向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
- 中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。

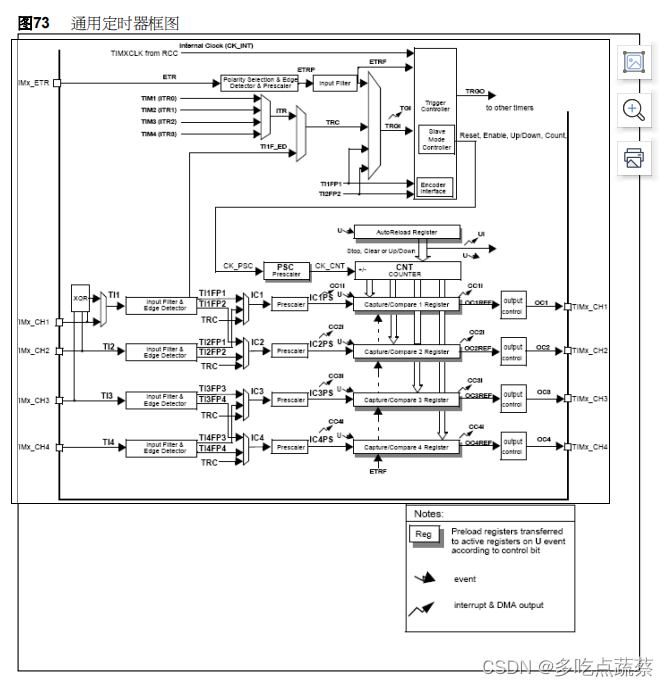
4.时钟产生器和时基单元
内部时钟(CK_INT)
外部时钟模式 1:外部输入脚(TIx)
外部时钟模式 2:外部触发输入(ETR)
内部触发输入(ITRx):使用A 定时器作为 B 定时器的预分频器(A 为 B 提供时钟)。 这些时钟,具体选择哪个可以通过 TIMx_SMCR 寄存器的相关位来设置。
时基单元就是定时器框图的第二部分,它包括三个寄存器,分别是:计数器寄存器(TIMx_CNT)、预分频器寄存器(TIMx_PSC)和自动装载寄存器(TIMx_ARR)。对这三个寄存器的介绍如下:
计数器寄存器(TIMx_CNT):向上计数、向下计数或者中心对齐计数;
计数器寄存器(TIMx_CNT):可将时钟频率按1到65535之间的任意值进行分频,可在运行时改变其设置值;
自动装载寄存器(TIMx_ARR):如果TIMx_CR1寄存器中的ARPE位为0,ARR寄存器的内容将直接写入影子寄存器;如果ARPE为1,ARR寄存器的那日同将在每次的更新时间UEV发生时,传送到影子寄存器;如果TIM1_CR1中的UDIS位为0,当计数器产生溢出条件时,产生更新事件。
5.工作原理
在选定的时钟源(可以是内部的也可以是外部的)和预分频器TIMX_PSC的驱动下,根据设置的计数模式(向上、向下、中央对齐)自动。
装载计数器TIMX_CNT开始计数;如果使能了相应的事件(更新事件、触发事件、输入捕获、输出比较)则会产生相应的中断。
- 如果没有开启输入和输出,只使能了计数器计数溢出后自动装载,可以做为一个简单定时器使用,计数器自己开始周期计数
- 如果开启了通道输入捕获,当检测到ICx信号上相应的边沿后,计数器(CNT)的当前值被锁存到捕获/比较寄存器(TIMx_CCRx)中,通过中断的方式可以读取出来假设为n1,然后更改输入捕获的信号级性(上升沿或下降沿),当再次检测到ICx信号上相应的边沿后,计数器(CNT)的当前值再次被锁存到捕获/比较寄存器(TIMx_CCRx)中假设为n2;n2 -n1节可算出电平的持续时间
- 如果开启了输出控制,可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的PWM信号。
- 如果选择外部的同步时钟信号(TI1F_ED、TI1FP1、TI2FP2)作为计数器的时钟源,可以用来统计脉冲,实现脉冲频率采集功能
二、实验步骤
1.用STM32CubeMx创建项目
1.1 创建项目
点击ACCESS TO MCU SELECTOR,进入下列界面,在Part Number选择好芯片点击,然后点击Start Project

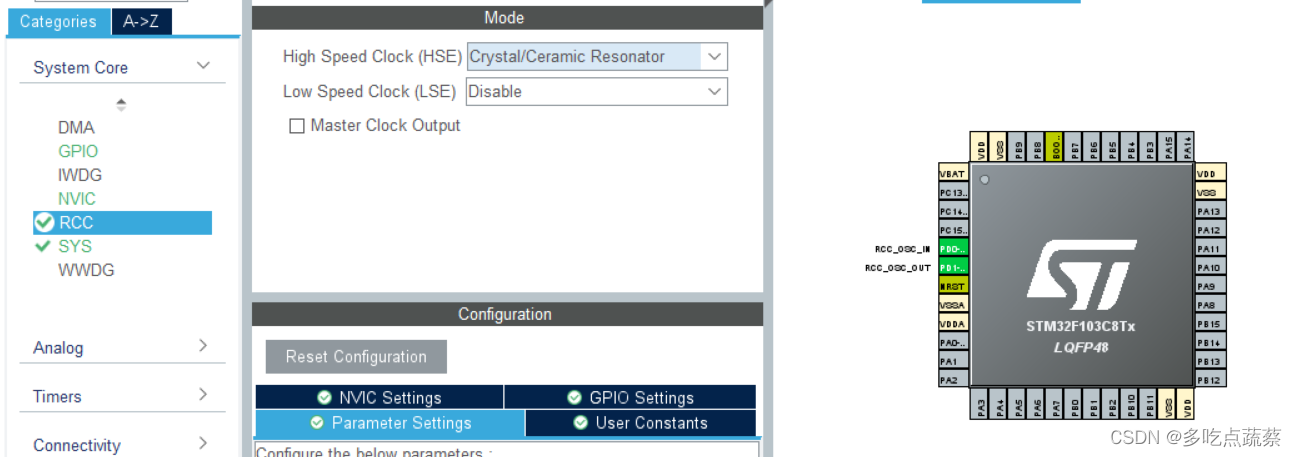
1.2 配置RCC和SYS
在System Core下选择RCC,将HSE改成Crystal/Ceramic Resonator
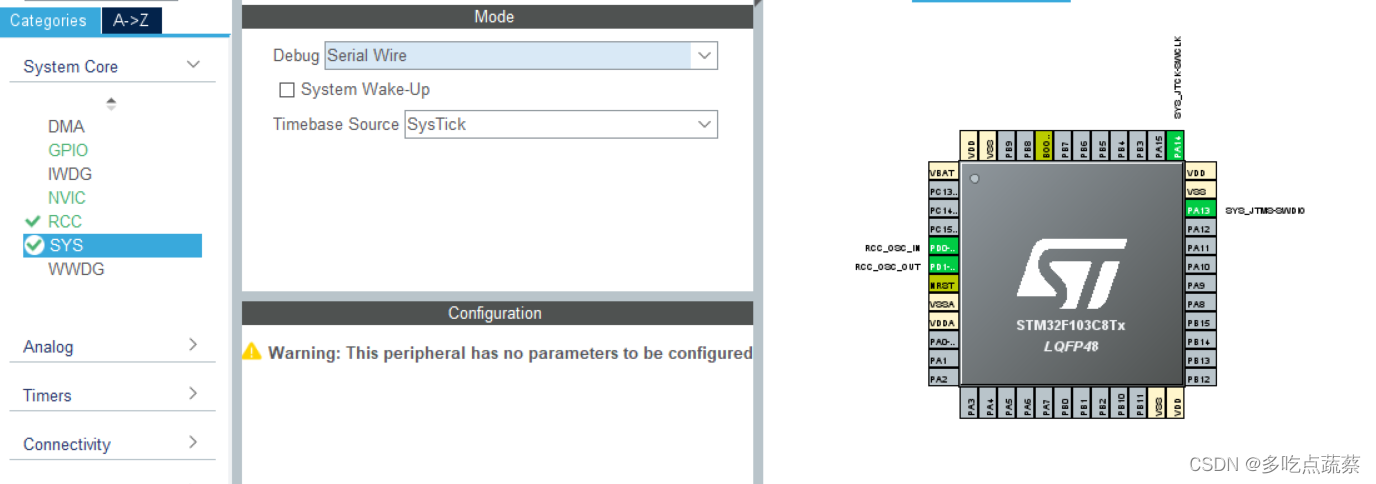
点击SYS,将Debug改成Serial Wire
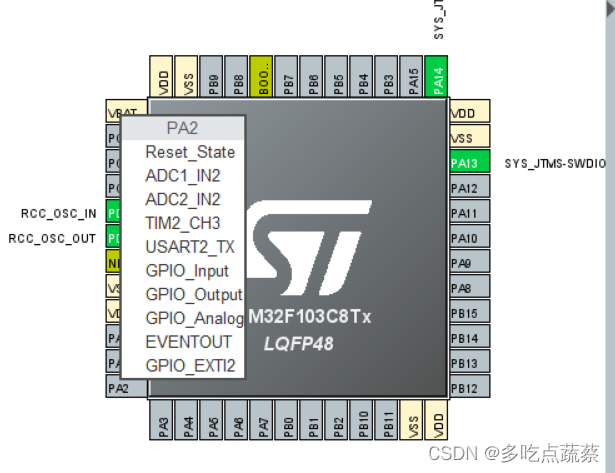
1.3 配置IO输出口
点击PA2,选择GPIO_Output
1.4 配置定时器
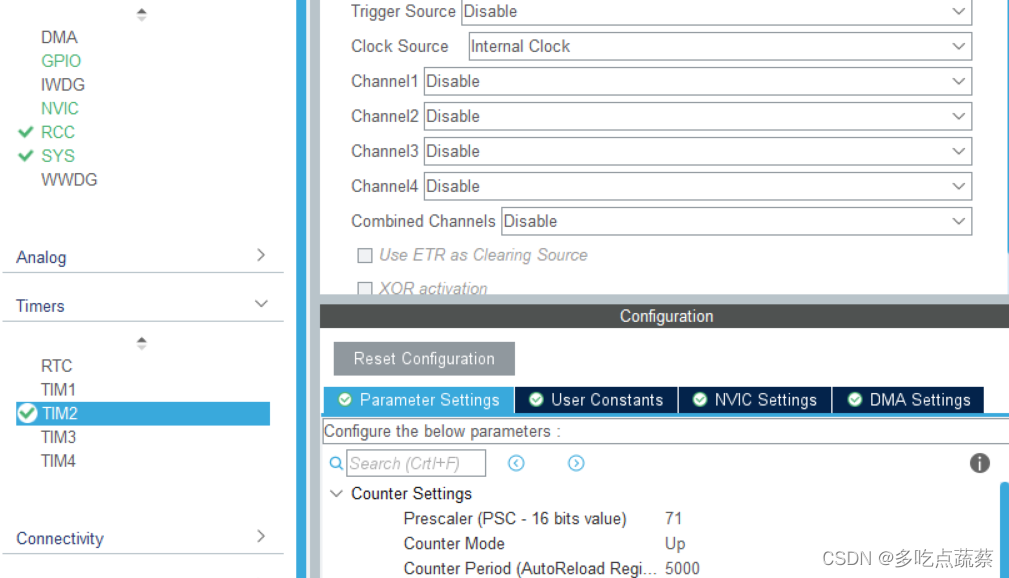
这里笔者选择定时器2和定时器3
在目录Timers下点击TIM2,将Clock Source时钟源选择为Internal Clock内部时钟,设置分频系数为71,向上计数模式,计数周期为5000。
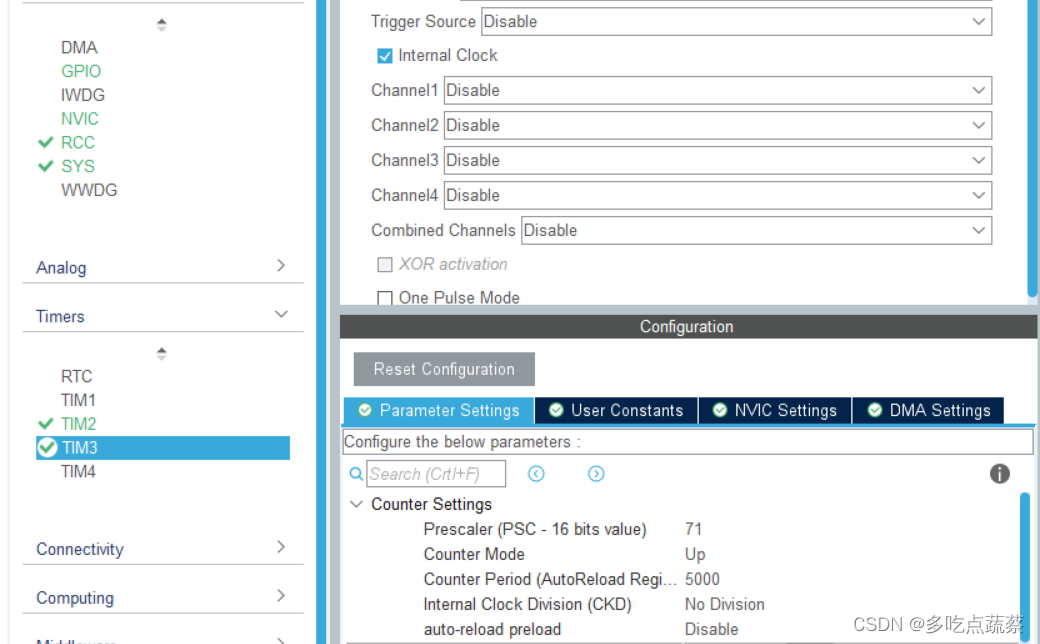
TIM3同上设置
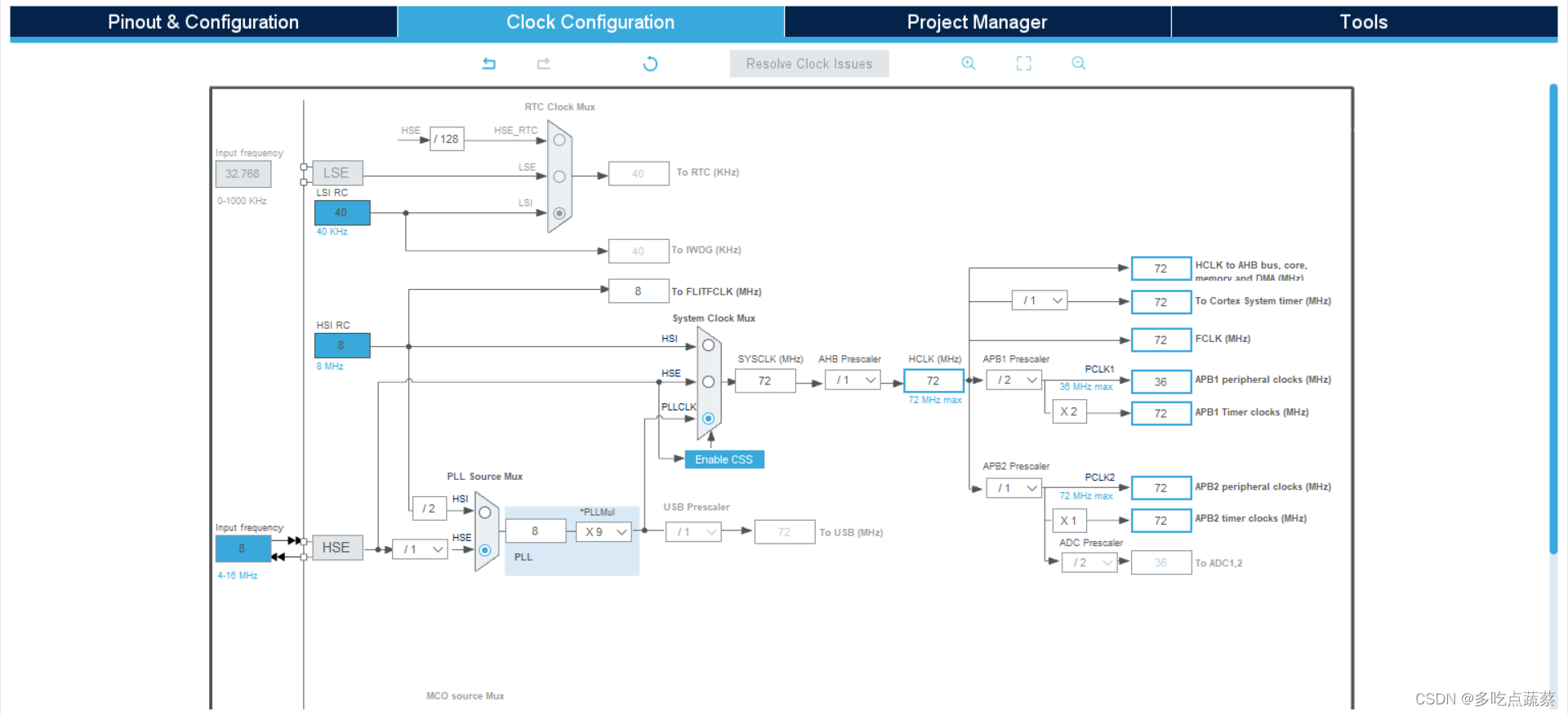
- 注意:分频系数虽然是71,但系统处理的时候会自动加上1,所以实际进行的是72分频。由于时钟一般会配置为72MHZ,所以72分频后得到1MHZ的时钟;1MHZ的时钟,计数5000次,得到时间5000/1000000=0.005秒;也就是每隔0.005秒定时器2会产生一次定时中断
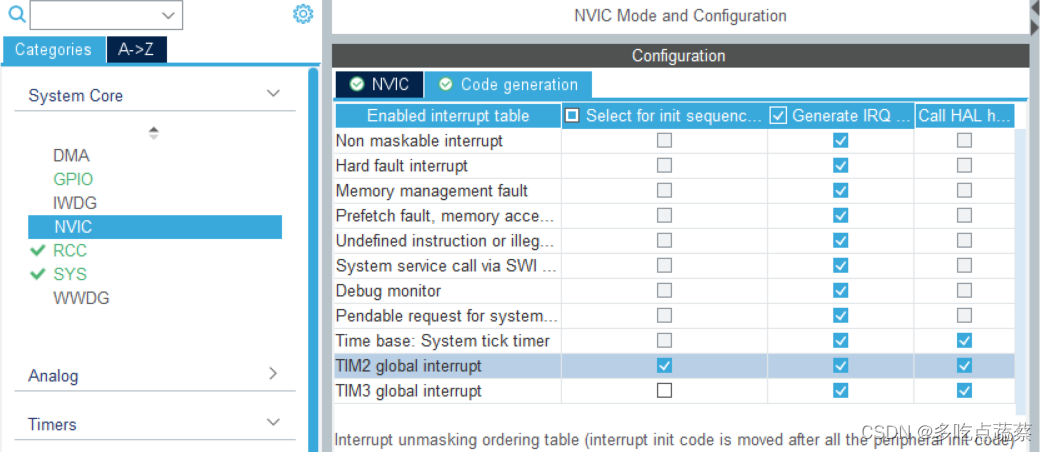
1.5 配置NVIC和USART1
点击NVIC,勾选TIM2和TIM3的中断
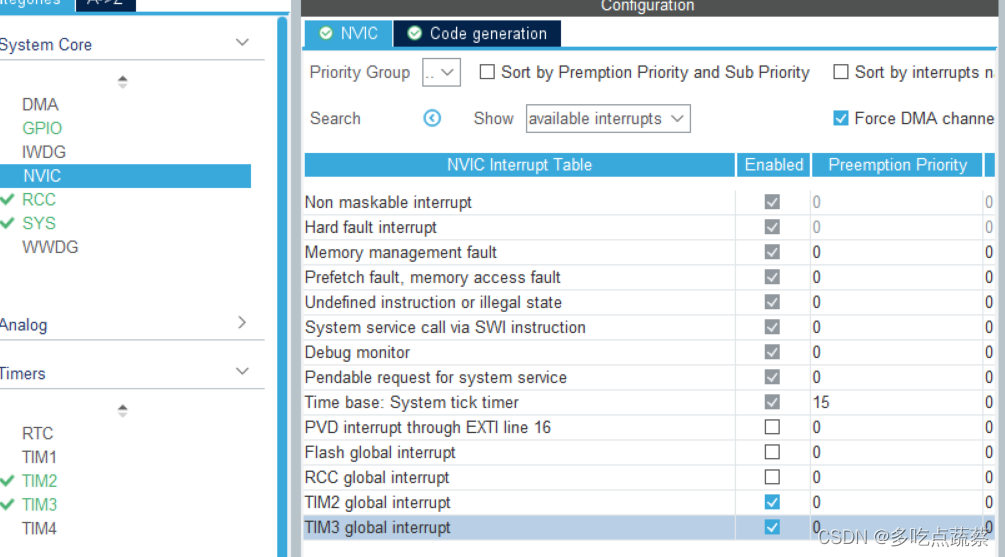
然后点击Code generation,勾选TIM2的中断优先级
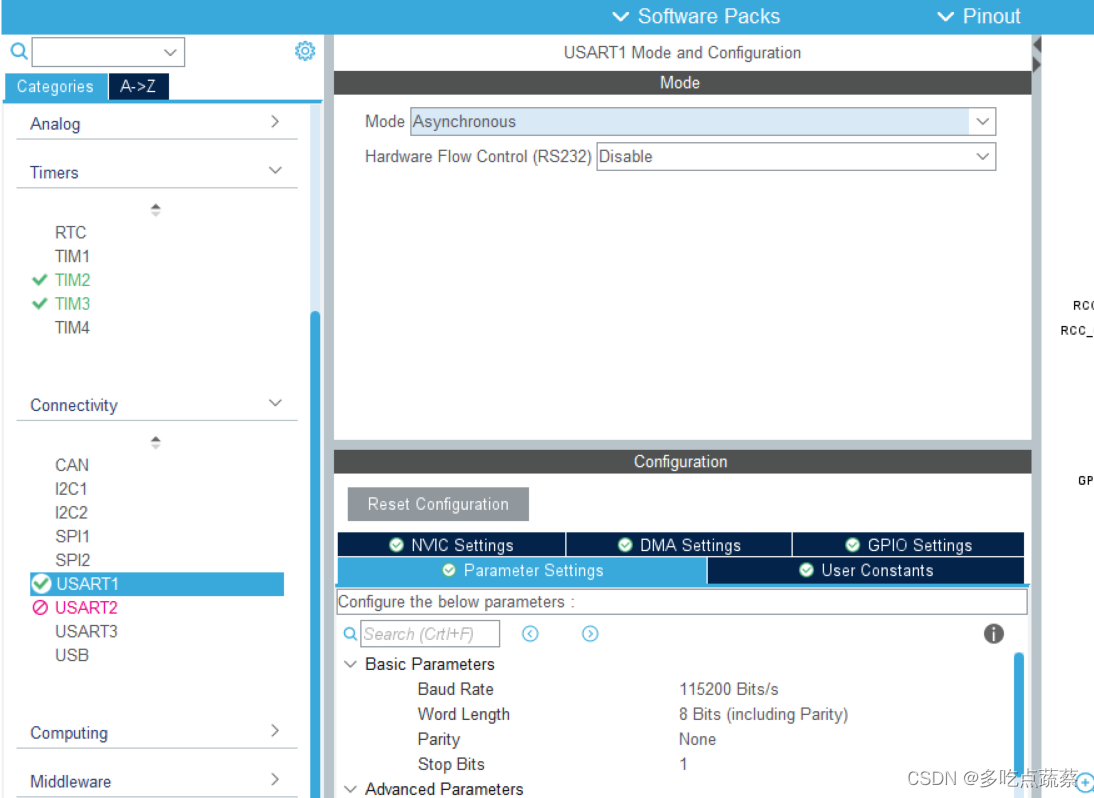
在目录Connectivity下点击USART1,将Mode改为异步通信Asynchronous
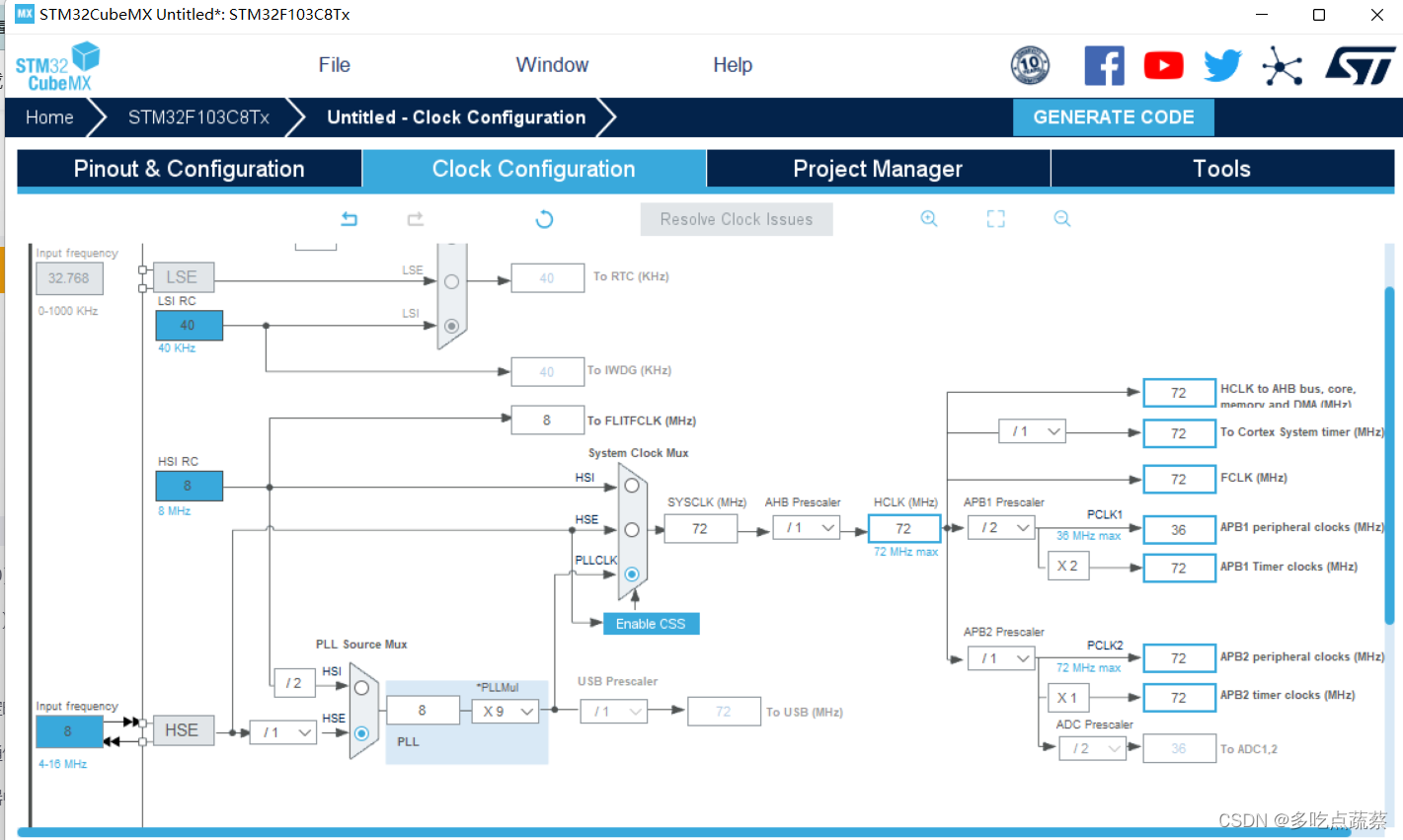
1.6 配置时钟
点击Clock,将HCLK改为72,点击回车
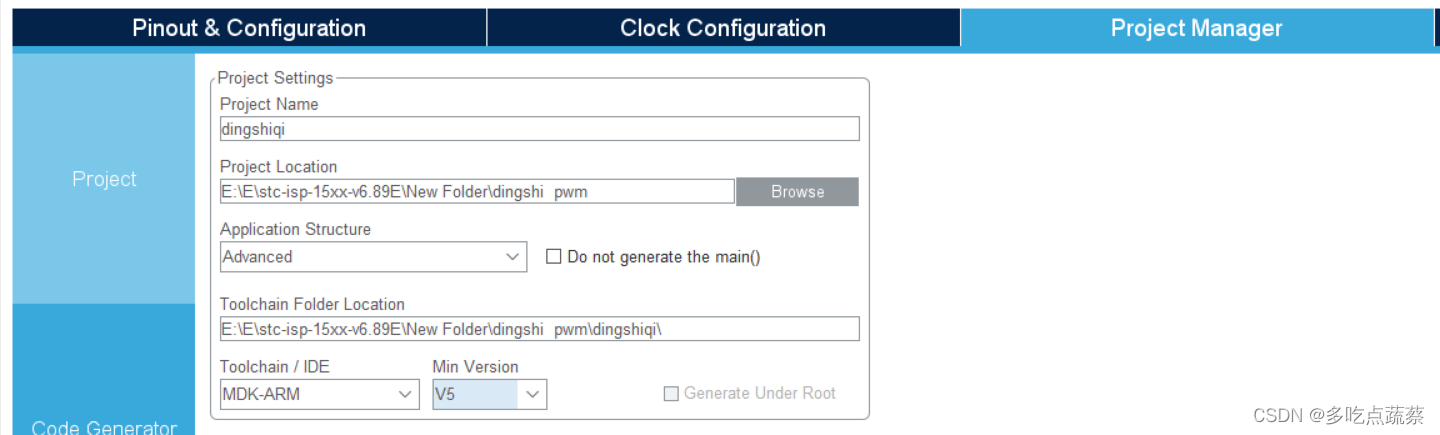
1.7 项目配置
点击Project Manager,填入项目名称,将IDE改为MDK-ARM,后面版本改为V5
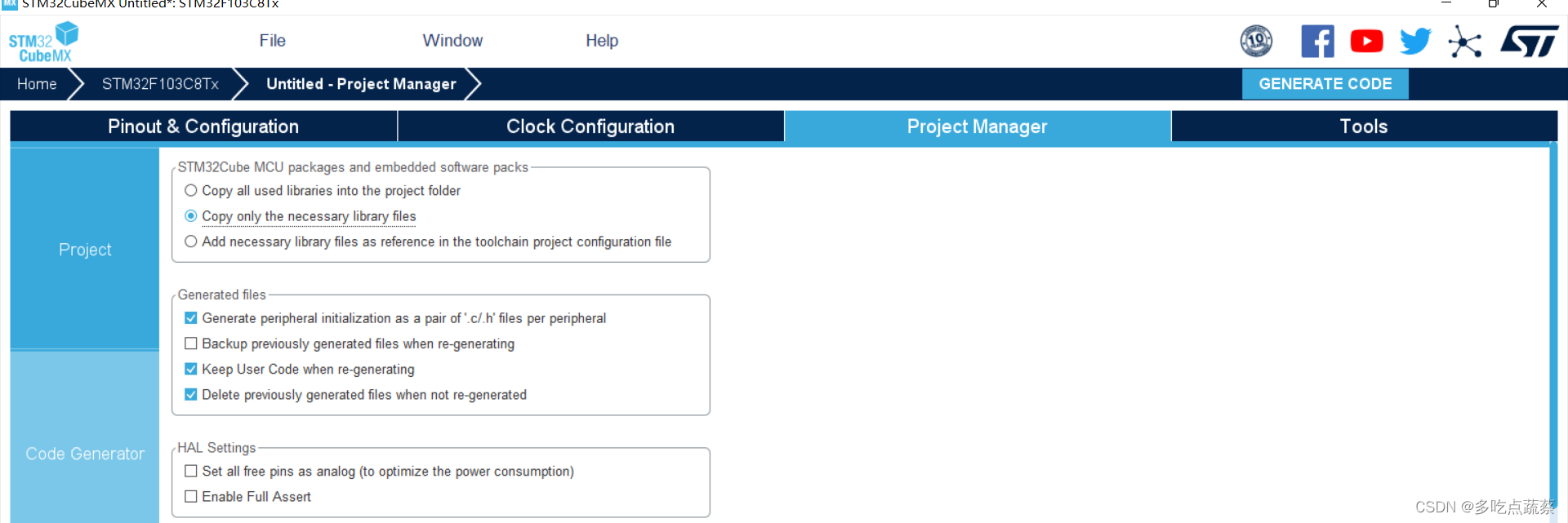
点击Code Generator,如下勾选。然后点击GENERATE CODE
2.用keil编写代码
2.1 定时器启动代码
代码如下
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
将代码放在主函数main.c下
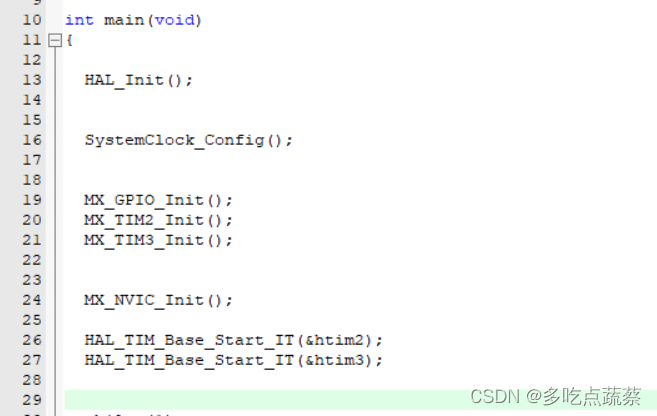
该函数表示启动相应的定时器,“h”表示HAL库,“tim2”表示定时器2。所以这行代码的意思就是启动定时器2。
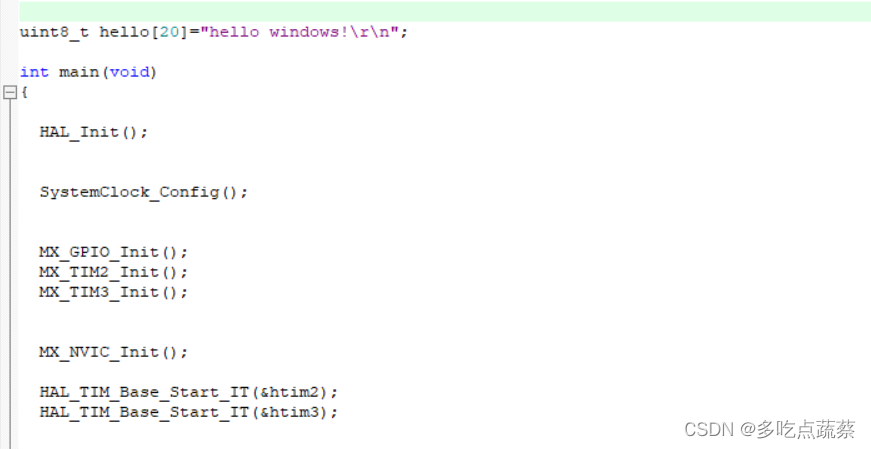
2.2 串口通信
代码如下
uint8_t hello[20]="hello windows!\r\n";
2.3 定时器中断回调函数
代码如下
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint32_t time_cnt =0;
static uint32_t time_cnt3 =0;
if(htim->Instance == TIM2)
{
if(++time_cnt >= 400)
{
time_cnt =0;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_2);
}
}
if(htim->Instance == TIM3)
{
if(++time_cnt3 >= 1000)
{
time_cnt3 =0;
HAL_UART_Transmit(&huart1,hello,20,100000);
}
}
}
三、实验结果
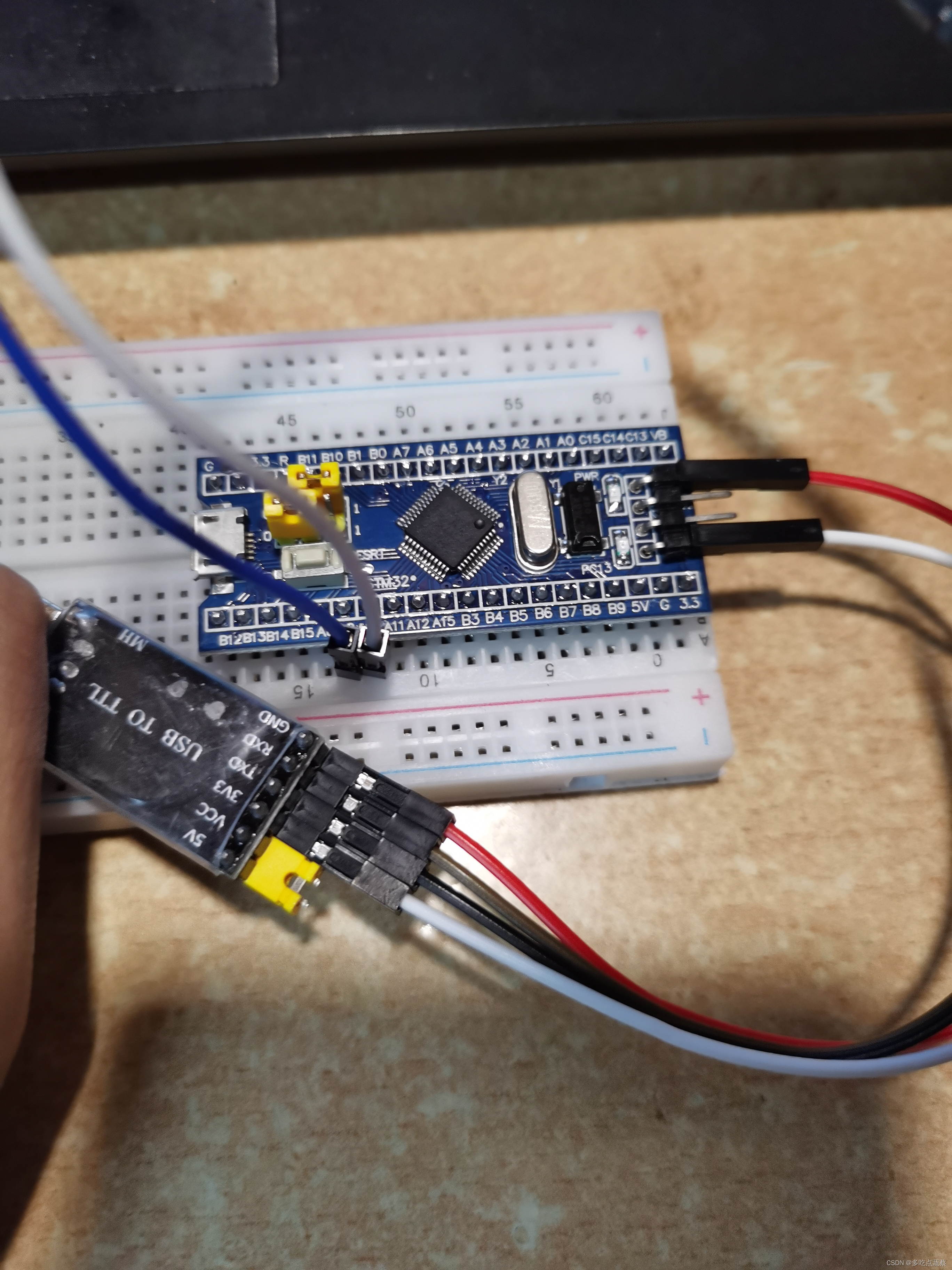
1.硬件连接
- USB转TTL和STM32最小核心板连接
3v3-3v3
GND-GND
RXD-A9
TXD-A10
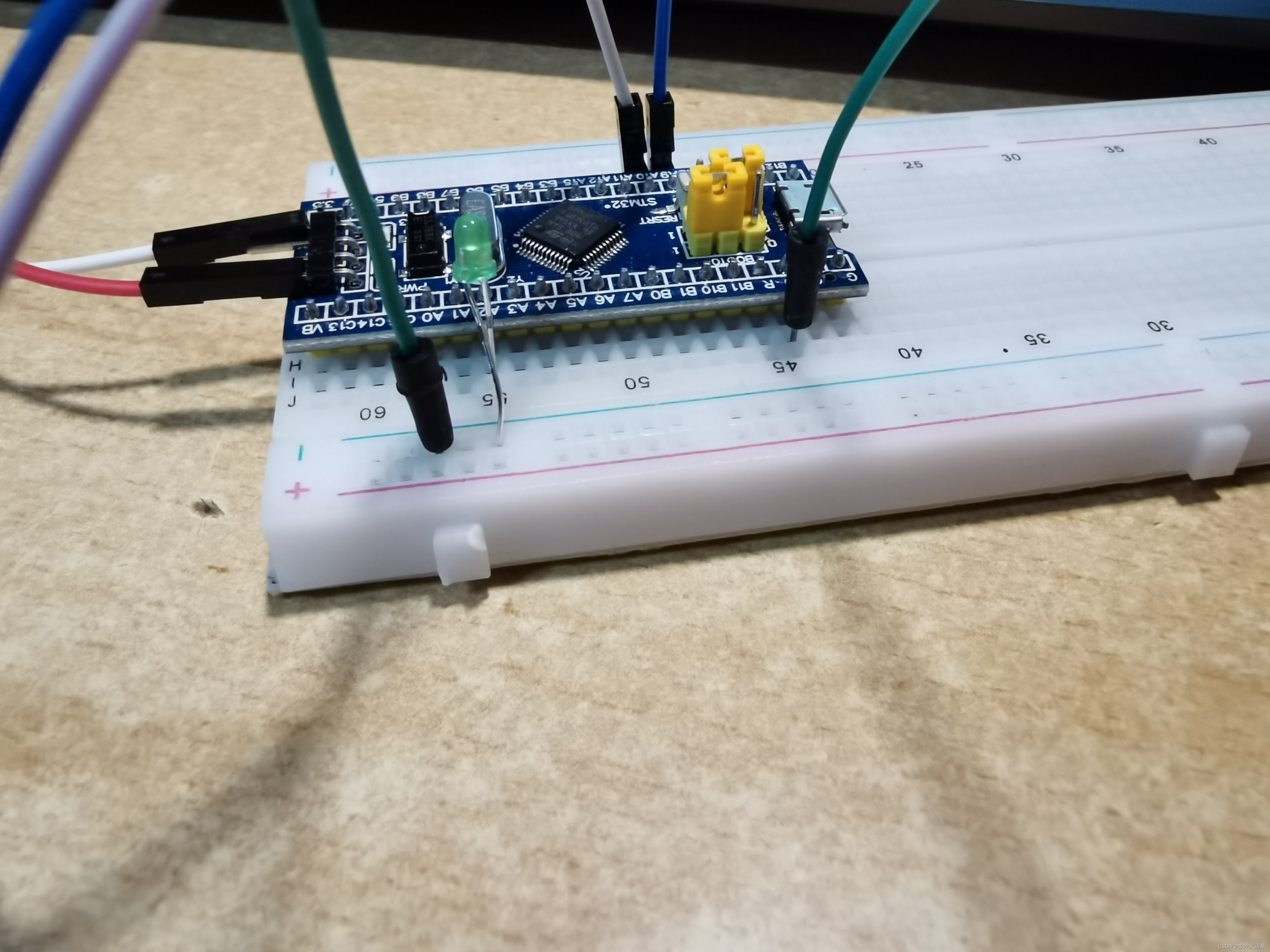
- 连接LED
LED短脚连接A2端口
LED长脚连接3v3
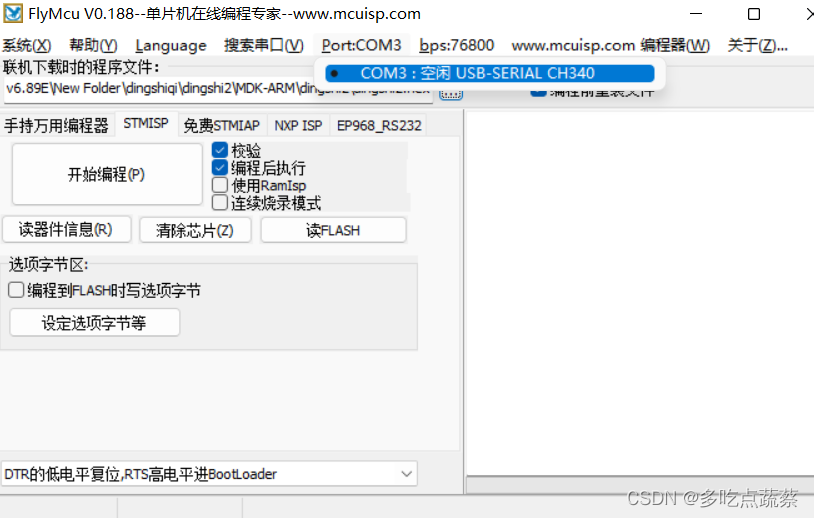
2.烧录实现
打开烧录软件flymcu
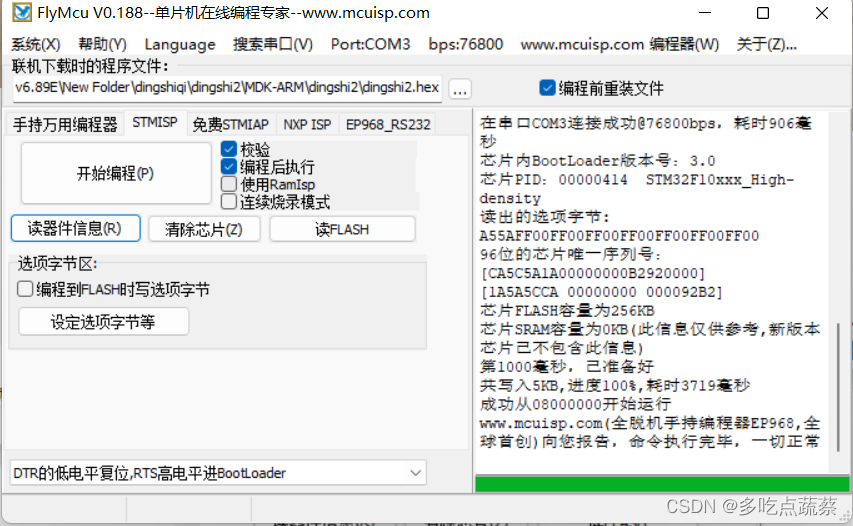
烧录成功后,可以观察到板子上的LED开始周期性闪烁
LED
打开串口调试助手,然后打开串口,观察串口输出
DINGSHIQI
总结
本篇博客主要是了解了一些定时器的理论知识,然后利用定时器Timer方式实现时间的精准控制,相当于给CPU上了一个闹钟,CPU平时处理其它任务,当定时时间到了以后,处理定时相关的任务。并实现,一个5秒的定时器,每隔5秒从串口发送“hello windows!”和一个2秒的定时器,让LED等周期性地闪烁。
在工程项目配置上,一定要配置好,笔者中途有个错误可能就是因为没配置好,导致代码定义出问题了
希望大家多多指正,交流问题!
参考:https://blog.csdn.net/qq_44016222/article/details/123507270
http://www.mcublog.cn/stm32/2021_01/stm32cubemx-dingshiqi-led/
https://blog.csdn.net/qq_53112972/article/details/127575333?spm=1001.2014.3001.5502

















 1423
1423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









