







提示:本篇博客是在阅读了YOLO源码中的mAP计算方法的代码后加上官方解释以及自己的debug调试理解每一步是怎么操作的。由于是大部分代码进行了逐行解释,所以篇幅过长。
文章目录
前言
首先,在理解YOLO源码中的mAP计算过程大部分参考了这篇文章:【目标检测】评价指标:mAP概念及其代码实现(yolo源码/pycocotools),这篇文章提到了mAP计算的一些基本知识,也提供了代码,这里也是参考的这篇文章里的yolo源码的mAP计算代码(这篇文章是根据YOLO源码中的整理过后的代码)。想要源码可以点链接进去或者本篇最后部分贴了源码。
一、输入格式处理
输入的格式要求如下图:

在进行mAP计算之前需要将YOLO模型预测文件的数据格式转换为绝对位置,并且需要进行相应位置的转换:
YOLO预测文件中:[class,
x
c
e
n
t
e
r
x_{center}
xcenter,
y
c
e
n
t
e
r
y_{center}
ycenter, width, height, conf]
→
\to
→ [
x
m
i
n
x_{min}
xmin,
y
m
i
n
y_{min}
ymin,
x
m
a
x
x_{max}
xmax,
y
m
a
x
y_{max}
ymax, conf, class]
其中的
x
c
e
n
t
e
r
x_{center}
xcenter,
y
c
e
n
t
e
r
y_{center}
ycenter, width, height为相对位置,都是归一化处理后的百分比位置,(
x
m
i
n
x_{min}
xmin,
y
m
i
n
y_{min}
ymin),(
x
m
a
x
x_{max}
xmax,
y
m
a
x
y_{max}
ymax)则是经过还原后在原图上标注框的左上角和右下角在原图中的坐标
真实结果同理进行转换:我们在标注label的时候保存格式也是经过归一化处理后的数据,在计算mAP的时候也需要还原到原图的坐标上去。
1.1 转换公式
此处的转换原理和公式参考这篇文章所提到的标签格式转换:利用mAP计算yolo精确度,同时这篇文章也有格式转换的代码,大家可以参考,此处就不再贴格式转换代码,只简述原理以及公式。
格式转换的原理如下图:
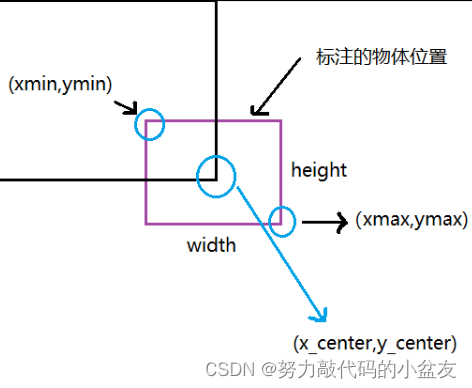
根据原理可以得到原始公式:
x
c
e
n
t
e
r
=
x
m
i
n
+
x
m
a
x
2
,
y
c
e
n
t
e
r
=
y
m
i
n
+
y
m
a
x
2
,
w
i
d
t
h
=
x
m
a
x
−
x
m
i
n
,
h
e
i
g
h
t
=
y
m
a
x
−
y
m
i
n
x_{center}= \frac{x_{min}+x_{max}}{2}, \ y_{center}= \frac{y_{min}+y_{max}}{2} ,\\ width = x_{max} - x_{min},\ height = y_{max} - y_{min}
xcenter=2xmin+xmax, ycenter=2ymin+ymax,width=xmax−xmin, height=ymax−ymin
联立上面四个公式可以得到:
x
m
i
n
=
x
c
e
n
t
e
r
−
w
i
d
t
h
2
,
x
m
a
x
=
x
c
e
n
t
e
r
+
w
i
d
t
h
2
y
m
i
n
=
y
c
e
n
t
e
r
−
h
e
i
g
h
t
2
,
y
m
a
x
=
y
c
e
n
t
e
r
+
h
e
i
g
h
t
2
x_{min}= x_{center} - \frac{width}{2}, \ x_{max}= x_{center} + \frac{width}{2} \\ y_{min}= y_{center}-\frac{height}{2}, \ y_{max}= y_{center} + \frac{height}{2}
xmin=xcenter−2width, xmax=xcenter+2widthymin=ycenter−2height, ymax=ycenter+2height
此时得到的(
x
m
i
n
x_{min}
xmin,
y
m
i
n
y_{min}
ymin),(
x
m
a
x
x_{max}
xmax,
y
m
a
x
y_{max}
ymax)是归一化后的坐标,还需要进行原图的还原:其中W、H为原图的宽度和高度。ps:此处的W、H和width、height不是同一个东西,width和height是经过归一化处理后的值,而W和H是原图的宽高
x
m
i
n
=
x
m
i
n
∗
W
,
x
m
a
x
=
x
m
a
x
∗
W
y
m
i
n
=
y
m
i
n
∗
H
,
y
m
a
x
=
y
m
a
x
∗
H
x_{min}= x_{min} \ast W , \ x_{max}= x_{max} \ast W \\ y_{min}= y_{min} \ast H,\ y_{max}= y_{max} \ast H
xmin=xmin∗W, xmax=xmax∗Wymin=ymin∗H, ymax=ymax∗H
二、init:初始化
2.1 iouv
iouv就是从0.5到0.95分为10个值的数组
2.2 stats
stats是一个列表,包含4个numpy数组
stats[0]
→
\to
→ shape:[
n
p
r
e
d
n_{pred}
npred,10]
→
\to
→ 所有预测框载10个IOU阈值上是TP还是FP,其中
n
p
r
e
d
n_{pred}
npred表述所有预测框的总数量
stats[1]
→
\to
→ shape:[
n
p
r
e
d
n_{pred}
npred]
→
\to
→ 所有预测框的置信度
stats[2]
→
\to
→ shape:[
n
p
r
e
d
n_{pred}
npred]
→
\to
→ 所有预测框的预测类别
stats[3]
→
\to
→ shape:[
n
l
a
b
e
l
n_{label}
nlabel]
→
\to
→ 所有真实框(即label标签的)的预测类别,其中
n
l
a
b
e
l
n_{label}
nlabel表述所有真实框的总数
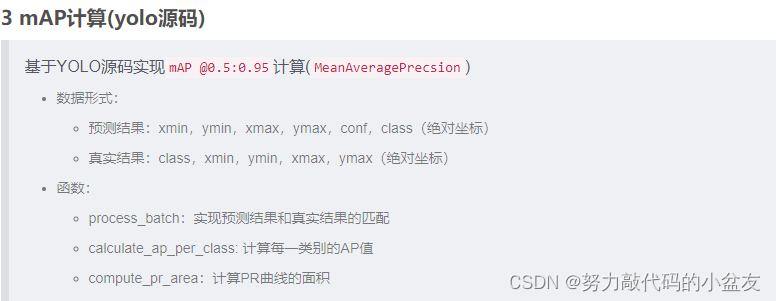
三、process_batch:实现预测结果和真实结果的匹配(TP/FP统计)
3.1 输入参数的格式
在一部分已经阐述了格式的转换,此处就不再进行赘述。
其中,N是预测框的总数,M是真实框的总数

3.2 代码注释(逐行)
# 每一个预测结果在不同IoU下的预测结果匹配
correct = np.zeros((detections.shape[0], self.niou)).astype(bool)
初始化correct(bool形式)
→
\to
→ shape:[N, 10]
→
\to
→ 在10个IOU阈值上每个预测框的TP、FP情况,True表示TP,False表示FP。
zeros即初始化全为0
→
\to
→ False
此处穿插python知识:使用shape可以快速读取矩阵的形状
# 二维矩阵
shape[0] # 读取矩阵第一维度的长度 即数组的行数
shape[1] # 读取矩阵第二维度的长度 即数组的列数
# 图像
image.shape[0] # 图片的高
image.shape[1] # 图片的宽
image.shape[2] # 图片的通道数
# 一般来说,在二维张量里,shape[-1]表示列数,
#注意,即使是一维行向量,shape[-1]表示行向量的元素总数,换言之也是列数:
shape[-1] # 表示最后一个维度
if detections is None:
self.stats.append((correct, *torch.zeros((2, 0), device=self.device), labels[:, 0]))
注意一下:本地调试的时候,这里直接写None会报错
后面本人使用以下解决:当没有产生预测文件的时候:使用tensor生成0行6列的向量。
else: # 没有预测框生成
detections = torch.zeros((0, 6))
然后将上面从头开始的两句(correct的初始化以及判空的语句)修改为下面这个即可。
nl, npr = labels.shape[0], detections.shape[0]
correct = torch.zeros(npr, self.niou, dtype=torch.bool, device="cpu")
if npr == 0:
if nl:
self.stats.append((correct, *torch.zeros((2, 0), device=self.device), labels[:, 0]))
else:
# 计算标签与所有预测结果之间的IoU
iou = box_iou(labels[:, 1:], detections[:, :4])
iou → \to → shape:[M,N],以labels真实框为行,detections预测框为列 → \to → 计算每个真实框与每个预测框之间的交并比IOU
# 计算每一个预测结果可能对应的实际标签
correct_class = labels[:, 0:1] == detections[:, 5]
correct_class
→
\to
→ shape:[M,N],以labels真实框为行,detections预测框为列
→
\to
→ 保存每个真实框与每个预测框之间的类别是否相等,True即为类别一致,False即为类别不一致。
其中,labels[:, 0:1] == detections[:, 5]返回值为bool类型,True or False
例子:比如预测框预测的三个框的类别依次为2,0,1(括号里面表示类别,括号前面表示下标),真实框只有两个框,并且类别依次为0,1。得到的correct_class矩阵如下所示
| label\detection | 0(2) | 1(0) | 2(1) |
|---|---|---|---|
| 0(1) | F | F | T |
| 1(2) | T | F | F |
for i in range(self.niou): # 在不同IoU置信度下的预测结果匹配结果
# 根据IoU置信度和类别对应得到预测结果与实际标签的对应关系
x = torch.where((iou >= self.iouv[i]) & correct_class)
外层的循环是指不同的IOU阈值下的计算
使用torch.where(此处采用的是后面所提的用法2:取Tensor中符合条件的坐标)获得真实框和预测框之间的iou大于此时的IOU阈值并且类别一致的结果
→
\to
→ shape:[2,
N
s
a
m
e
N_{same}
Nsame]
→
\to
→
N
s
a
m
e
N_{same}
Nsame指的是一致的组总数量,第一行表示行坐标,第二行表示列坐标。
例子:假设前面获得的iou和correct_class如下,此时的iou阈值为0.5,(0,2)(1,0)这两组符合条件,成为返回的结果。故torch.where返回值为[ [0,1] [2,0] ]。(第一行表示真实框索引,第二行表示预测框索引)
iou:
| label\detection | 0(2) | 1(0) | 2(1) |
|---|---|---|---|
| 0(1) | 0.6 | 0.7 | 0.8 |
| 1(2) | 0.9 | 0.2 | 0.1 |
correct_class:
| label\detection | 0(2) | 1(0) | 2(1) |
|---|---|---|---|
| 0(1) | F | F | T |
| 1(2) | T | F | F |
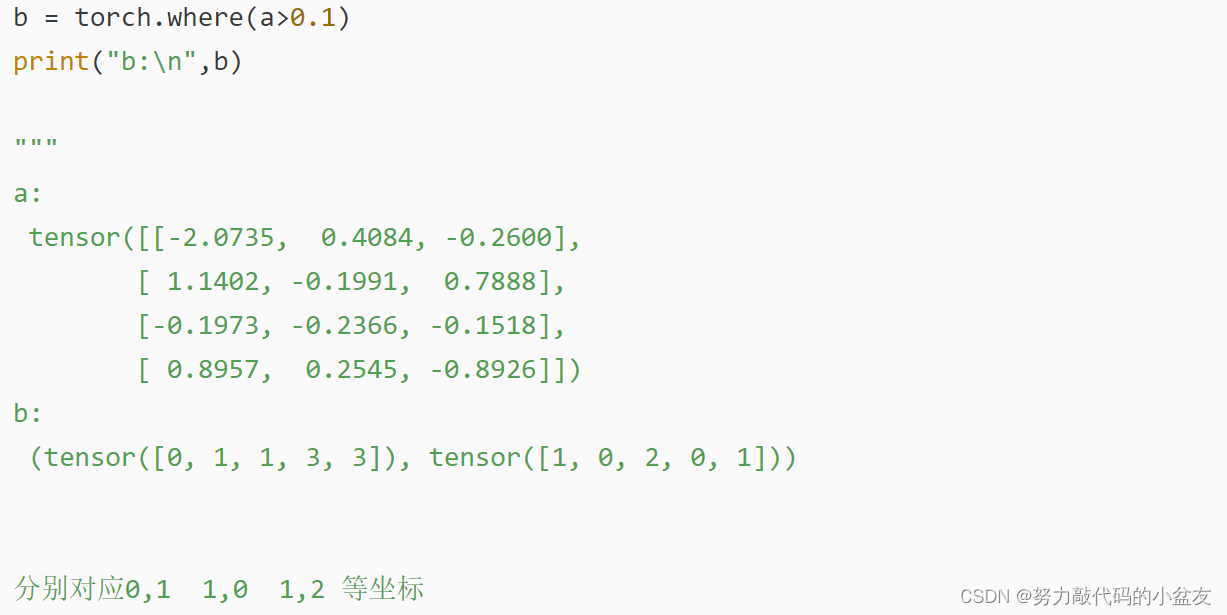
此处穿插python知识:torch.where用法
参考这篇文章:torch.where()的两种用法
用法1:按照指定条件合并两个同维度Tensor:
函数原型:torch.where(condition, x, y)
→
\to
→ Tensor

用法2:取Tensor中符合条件的坐标:
函数原型:torch.where(condition)
→
\to
→ Tensor
# 若存在和实际标签相匹配的预测结果
# x[0]:存在为True的索引(实际结果索引), x[1]当前所有True的索引(预测结果索引)
if x[0].shape[0]:
# [label, detect, iou]
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
通俗讲,x[0]指的是x的第一行,即对应真实框的索引号。x[1]指的是x的第二行,即对应的预测框的索引号。如果x[0]存在,就进行一个[label, detect, iou]的拼接。
torch.stack(x, 1)
→
\to
→ x在列上进行拼接,从[ [0,1] [2,0] ]
→
\to
→ [ [0,2] [1,0] ]。相当于就是变回一组坐标的形式。
iou[x[0], x[1]][:, None]
→
\to
→ 将iou矩阵中的对应于x中的索引的iou取出来,以[[0.8],[0.9]]的形式。
torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1)
→
\to
→ 将前面所得到的两个东西在列上进行拼接
→
\to
→ 得到[ [0,2,0.8], [1,0,0.9] ] (形成[label, detect, iou])
此处穿插python知识:torch.stack用法
沿一个新维度对输入一系列张量进行连接,序列中所有张量应为相同形状,stack 函数返回的结果会新增一个维度。
# dim = 0 : 在第0维进行连接,相当于在行上进行组合(输入张量为一维,输出张量为两维)
a = torch.tensor([1, 2, 3])
b = torch.tensor([11, 22, 33])
c = torch.stack([a, b],dim=0)
#c => tensor([[ 1, 2, 3], [11, 22, 33]])
# dim=1:在第1维进行连接,相当于在对应行上面对列元素进行组合(输入张量为一维,输出张量为两维)
a = torch.tensor([1, 2, 3])
b = torch.tensor([11, 22, 33])
c = torch.stack([a, b],dim=1)
#c => tensor([[ 1, 11], [ 2, 22], [ 3, 33]])
此处穿插python知识:torch.cat用法
用于在指定的维度上拼接张量。这个函数接收一个张量列表,并在指定的维度上将它们连接起来。它通常用于连接两个或多个张量,以创建一个更大的张量。
tensor1 = torch.tensor([[1, 2], [3, 4]])
tensor2 = torch.tensor([[5, 6], [7, 8]])
# 在第0维(行)上连接这两个张量
result = torch.cat((tensor1, tensor2), dim=0)
# result => tensor([[1, 2], [3, 4], [5, 6], [7, 8]])
# 新的张量,行数=tensor1和tensor2 的行数之和,列数与 tensor1 和 tensor2 的列数相同。
if x[0].shape[0] > 1: # 存在多个与目标对应的预测结果
# 根据IoU从高到低排序 [实际结果索引,预测结果索引,结果IoU]
matches = matches[matches[:, 2].argsort()[::-1]]
matches[:, 2].argsort()[::-1] → \to → -1指的是逆序排序,即从IOU高到低排序,2是指matches[2]即iou值,整体返回的是逆序排位后的索引,如[1,0] (因为0.9>0.8,所以第二行应该和第一行交换位置,所以得到的排序后的索引为[1,0])
再使用matches = matches[排序后的索引] 进行替换重置。
# 每一个预测结果保留一个和实际结果的对应
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
# 每一个实际结果和一个预测结果对应
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
np.unique(matches[:, 0], return_index=True)[0] => 去除重复后的值 [1] => 去除重复后的每个值对应的索引 [2] => dtype
然后matches再根据获得去除重复后的索引进行排列。
ps:因为前面已经按照IOU从高到低进行排序了,故当去除的时候自动保留最高的IOU的那一组
此处穿插python知识:numpy.unique用法
此处参考这篇文章:【Python】np.unique() 介绍与使用
去除其中重复的元素 ,并按元素由小到大返回一个新的无元素重复的元组或者列表。
# 格式:numpy.unique(arr, return_index, return_inverse, return_counts)
# arr:输入数组,如果不是一维数组则会展开
# return_index:如果为 true,返回新列表元素在旧列表中的位置(下标),并以列表形式存储。
# return_inverse:如果为true,返回旧列表元素在新列表中的位置(下标),并以列表形式存储。
# return_counts:如果为 true,返回去重数组中的元素在原数组中的出现次数。
A = [1, 2, 2, 5, 3, 4, 3]
a = np.unique(A) # [1 2 3 4 5]
a, indices = np.unique(A, return_index=True)# 返回新列表元素在旧列表中的位置(下标)
# a => [1 2 3 4 5] indices => [0 1 4 5 3]
a, indices = np.unique(A, return_inverse=True)# 旧列表的元素在新列表的位置
# a => [1 2 3 4 5] indices => [0 1 1 4 2 3 2]
a, indices = np.unique(A, return_counts=True)# 每个元素在旧列表里各自出现了几次
# a => [1 2 3 4 5] indices => [1 2 2 1 1]
# 表明当前预测结果在当前IoU下实现了目标的预测
correct[matches[:, 1].astype(int), i] = True
matches[:, 1].astype(int)
→
\to
→ 将matches的1列(第二列,即预测框的索引)作为int类型
matches表明经过筛选后留下的预测框的索引,然后在correct矩阵中将其置为True,即表明在该阈值(i)下,此预测框为正确的预测(TP)。
# 预测结果在不同IoU是否预测正确, 预测置信度, 预测类别, 实际类别
self.stats.append((correct, detections[:, 4], detections[:, 5], labels[:, 0]))
当所有iou阈值循环完成后,stats添加筛选过后的四个Numpy数组:correct、conf、class、label_class。
一个小总结:
| 数组名 | shape | 意义 |
|---|---|---|
| correct | [ N p r e d N_{pred} Npred, 10] | N p r e d N_{pred} Npred表示所有预测框的数量,表示所有预测框在该IOU阈值下为TP还是FP |
| correct_class | [ N l a b e l N_{label} Nlabel, N p r e d N_{pred} Npred] | 表明每组真实框与预测框之间的类别是否一致 |
| x | [2,X] | 经过类别和阈值筛选后剩下的X组数据的索引号,第一行表示行坐标,第二行表示列坐标 |
| matches | [Y,3] | 去除重复后剩下的Y组数据,[label, detection, iou]形式,表明预测框和真实框匹配的框的数据 |
| stats | 每一维都有四个数组 | 分别为correct、conf、class、label_class |
四、calculate_ap_per_class: 计算每一类别的AP值
4.1 代码注释(逐行)
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*self.stats)] # to numpy
# tp:所有预测结果在不同IoU下的预测结果 [n, 10]
# conf: 所有预测结果的置信度
# pred_cls: 所有预测结果得到的类别
# target_cls: 所有图片上的实际类别
tp, conf, pred_cls, target_cls = stats[0], stats[1], stats[2], stats[3]
# 根据类别置信度从大到小排序
i = np.argsort(-conf) # 根据置信度从大到小排序
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
第一行代码是将所有图片的四个数组进行汇总,在YOLO源码中,未拼接前 → \to → stats[0] 指第一张图的四个数组,拼接后 → \to → stats[0]指所有图片的所有预测框的TP/FP情况。
然后再根据置信度逆序排序,即按照置信度从高到低进行排序。
# 得到所有类别及其对应数量(目标类别数)
unique_classes, nt = np.unique(target_cls, return_counts=True)
nc = unique_classes.shape[0] # number of classes
# ap: 每一个类别在不同IoU置信度下的AP,shape[nc类别数, 10],
# p:每一个类别的P曲线(不同类别置信度), r:每一个类别的R(不同类别置信度)
ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
np.unique用法见前面,此处不再赘述。
for ci, c in enumerate(unique_classes): # 对每一个类别进行P,R计算,ci为c的index,c为值
i = pred_cls == c
n_l = nt[ci] # number of labels 该类别的实际数量(正样本数量)
n_p = i.sum() # number of predictions 预测结果数量
if n_p == 0 or n_l == 0:
continue
i = pred_cls == c返回的是bool类型的一维数组。
nt指的是每个类别真实框的总数量,一维数组。
# cumsum:轴向的累加和, 计算当前类别在不同的类别置信度下的P,R
fpc = (1 - tp[i]).cumsum(0) # FP累加和(预测为负样本且实际为负样本)
tpc = tp[i].cumsum(0) # TP累加和(预测为正样本且实际为正样本)
# 召回率计算(不同的类别置信度下)
recall = tpc / (n_l + eps)
# 精确率计算(不同的类别置信度下)
precision = tpc / (tpc + fpc)
TP和FP的计算方式开头所提到的参考文章有非常清楚的解释,此处不再赘述。
此处说一下tp[i]的用法见下图,前面获得了i这个数组,记录了在tp数组中哪些预测框是当前类别的预测框。
tp[i]会保留对应i为True的数据。

cumsum()的用法见图
import numpy as np
a = np.asarray([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]
])
b = a.cumsum(axis=0) # 按行累加
# b=>[[1 2 3] [5 7 9] [12 15 18]]
c = a.cumsum(axis=1) # 按列累加
# c=>[[1 3 6] [4 9 15] [7 15 24]]
# 计算不同类别置信度下的AP(根据P-R曲线计算)
for j in range(tp.shape[1]):
ap[ci, j], mpre, mrec = self.compute_ap(recall[:, j], precision[:, j])
# 所有类别的ap值 @0.5:0.95
return ap
最后得到recall和precision值后就是计算ap值。
五、compute_ap:计算PR曲线的面积
此处就是计算每一组PR值形成的曲线的面积,代码本来的注解就很清晰明了,此处就不逐行解释了。
此处贴一个插值积分求面积的博客,里面比较详细介绍了插值积分:numpy.interp()用法
六、源码
class MeanAveragePrecison:
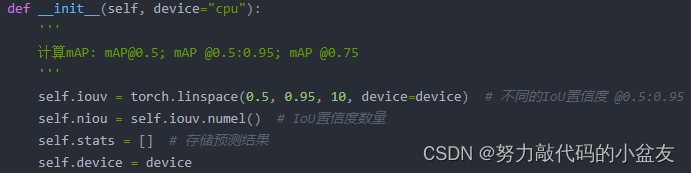
def __init__(self, device="cpu"):
'''
计算mAP: mAP@0.5; mAP @0.5:0.95; mAP @0.75
'''
self.iouv = torch.linspace(0.5, 0.95, 10, device=device) # 不同的IoU置信度 @0.5:0.95
self.niou = self.iouv.numel() # IoU置信度数量
self.stats = [] # 存储预测结果
self.device = device
def process_batch(self, detections, labels):
'''
预测结果匹配(TP/FP统计)
:param detections:(array[N,6]) x1,y1,x1,y1,conf,class (原图绝对坐标)
:param labels:(array[M,5]) class,x1,y1,x2,y2 (原图绝对坐标)
'''
# 每一个预测结果在不同IoU下的预测结果匹配
correct = np.zeros((detections.shape[0], self.niou)).astype(bool)
if detections is None:
self.stats.append((correct, *torch.zeros((2, 0), device=self.device), labels[:, 0]))
else:
# 计算标签与所有预测结果之间的IoU
iou = box_iou(labels[:, 1:], detections[:, :4])
# 计算每一个预测结果可能对应的实际标签
correct_class = labels[:, 0:1] == detections[:, 5]
for i in range(self.niou): # 在不同IoU置信度下的预测结果匹配结果
# 根据IoU置信度和类别对应得到预测结果与实际标签的对应关系
x = torch.where((iou >= self.iouv[i]) & correct_class)
# 若存在和实际标签相匹配的预测结果
if x[0].shape[0]: # x[0]:存在为True的索引(实际结果索引), x[1]当前所有True的索引(预测结果索引)
# [label, detect, iou]
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
if x[0].shape[0] > 1: # 存在多个与目标对应的预测结果
matches = matches[matches[:, 2].argsort()[::-1]] # 根据IoU从高到低排序 [实际结果索引,预测结果索引,结果IoU]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]] # 每一个预测结果保留一个和实际结果的对应
matches = matches[np.unique(matches[:, 0], return_index=True)[1]] # 每一个实际结果和一个预测结果对应
correct[matches[:, 1].astype(int), i] = True # 表面当前预测结果在当前IoU下实现了目标的预测
# 预测结果在不同IoU是否预测正确, 预测置信度, 预测类别, 实际类别
self.stats.append((correct, detections[:, 4], detections[:, 5], labels[:, 0]))
def calculate_ap_per_class(self, save_dir='.', names=(), eps=1e-16):
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*self.stats)] # to numpy
# tp:所有预测结果在不同IoU下的预测结果 [n, 10]
# conf: 所有预测结果的置信度
# pred_cls: 所有预测结果得到的类别
# target_cls: 所有图片上的实际类别
tp, conf, pred_cls, target_cls = stats[0], stats[1], stats[2], stats[3]
# 根据类别置信度从大到小排序
i = np.argsort(-conf) # 根据置信度从大到小排序
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# 得到所有类别及其对应数量(目标类别数)
unique_classes, nt = np.unique(target_cls, return_counts=True)
nc = unique_classes.shape[0] # number of classes
# ap: 每一个类别在不同IoU置信度下的AP, p:每一个类别的P曲线(不同类别置信度), r:每一个类别的R(不同类别置信度)
ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
for ci, c in enumerate(unique_classes): # 对每一个类别进行P,R计算
i = pred_cls == c
n_l = nt[ci] # number of labels 该类别的实际数量(正样本数量)
n_p = i.sum() # number of predictions 预测结果数量
if n_p == 0 or n_l == 0:
continue
# cumsum:轴向的累加和, 计算当前类别在不同的类别置信度下的P,R
fpc = (1 - tp[i]).cumsum(0) # FP累加和(预测为负样本且实际为负样本)
tpc = tp[i].cumsum(0) # TP累加和(预测为正样本且实际为正样本)
# 召回率计算(不同的类别置信度下)
recall = tpc / (n_l + eps)
# 精确率计算(不同的类别置信度下)
precision = tpc / (tpc + fpc)
# 计算不同类别置信度下的AP(根据P-R曲线计算)
for j in range(tp.shape[1]):
ap[ci, j], mpre, mrec = self.compute_ap(recall[:, j], precision[:, j])
# 所有类别的ap值 @0.5:0.95
return ap
def compute_ap(self, recall, precision):
# 增加初始值(P=1.0 R=0.0) 和 末尾值(P=0.0, R=1.0)
mrec = np.concatenate(([0.0], recall, [1.0]))
mpre = np.concatenate(([1.0], precision, [0.0]))
# Compute the precision envelope np.maximun.accumulate
# (返回一个数组,该数组中每个元素都是该位置及之前的元素的最大值)
mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
# 计算P-R曲线面积
method = 'interp' # methods: 'continuous', 'interp'
if method == 'interp': # 插值积分求面积
x = np.linspace(0, 1, 101) # 101-point interp (COCO))
# 积分(求曲线面积)
ap = np.trapz(np.interp(x, mrec, mpre), x)
elif method == 'continuous': # 不插值直接求矩阵面积
i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
return ap, mpre, mrec
结束语
浅浅记录这几天阅读YOLO源码中的mAP计算过程,自身python基础不太ok,也算一边查阅python语法知识一边debug看懂每一步中数值的变化。可能以上自身的理解存在一点偏差,如果存在问题欢迎大家在评论区指出~














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









