







-
本篇博客为博主在学习PLC电气控制编程时的复习整理
-
PLC(Programmable Logic Controller)
1. PLC硬件有哪几部分组成?
CPU,存储器,电源,开关量(数字量)输入,开关量(数字量)输出,模拟量输入,模拟量输出,其他特殊模块(串口模块,网口模块,定位模块等)。
2. PLC 的应用范围有哪些?
开关量的逻辑控制、模拟量控制、运动控制、过程控制、数据处理、通信及联网。
3. PLC 控制系统与继电接触器控制系统有哪些不同点和相同点?
PLC梯形图与传统的电气原理图非常相似,信号的输入/输出形式及控制功能基本上也是相同的。
不同点:
1)*控制方式*:继电器控制系统的控制是采用硬件接线实现的,是利用继电器机械触点的串联或并联极延时继电器的滞后动作等组合形成控制逻辑,只能完成既定的逻辑控制。PLC控制系统采用存储逻辑,其控制逻辑是以程序方式存储在内存中,要改变控制逻辑,只需改变程序即可,称软接线。
2)*工作方式*:继电器控制系统采用并行的工作方式,PLC控制系统采用串行工作方式。
3)*控制速度*:继电器控制系统控制逻辑是依靠触点的机械动作实现控制,工作频率低,毫秒级,机械触点有抖动现象。PLC控制系统是由程序指令控制半导体电路来实现控制,速度快,微秒级,严格同步,无抖动。
4)*定时与计数控制*:继电器控制系统是靠时间继电器的滞后动作实现延时控制,而时间继电器定时精度不高,受环境影响大,调整时间困难。继电器控制系统不具备计数功能。PLC控制系统用半导体集成电路作定时器,时钟脉冲由晶体振荡器产生,精度高,调整时间方便,不受环境影响。另外PLC系统具备计数功能。
5)*可靠性和维护性*:继电器控制系统可靠性较差,线路复杂,维护工作量大,PLC控制系统可靠性较高,外部线路简单,维护工作量小。
4. PLC 的输出一般有哪些方式,驱动的负载类型是哪些?
1、*继电器输出*,负载为直流或交流负载,这类输出为数字量,可通过中间继电器转换带动较大一些的负载,如接触器等,但在要求快速响应的场合不适合使用此种类型的输出。
2、*晶闸管或晶体管输出*,PLC双向晶闸管输出电路只能驱动交流负载,响应速度也比继电器输出电路形式要快,寿命要长。双向晶闸管输出的驱动能力要比继电器输出的要小,允许负载电压一般为AC85~242V;单点输出电流为0.2A~0.5A,当多点共用公共端时,每点输出电流应减小(如单点驱动能力为0.3A的双向晶闸管输出,在4点共用公共端时,最大允许输出为0.8A/4点)。负载为单向直流负载。
3、*脉冲输出*,也叫PTO输出,提供一个指定脉冲数量的方波输出(50%占空比)。PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲包络)。 PWM可输出周期固定但占空比可变的脉冲。以指定频率(周期)启动后,PWM持续输出。脉冲宽度根据所需的控制控制要求进行变化。占空比可以表示为周期的一个百分比或者对应于脉冲宽度的一个时间值。脉冲宽度可以从0%(无脉冲,一直为低电平)变化到100%(无脉冲,一直为高电平)。由于PWM输出可以从0%变化到100%,在很多情况下,它可以提供类似于模拟量输出的数字量输出。单段PTO(脉冲串输出)
4、*模拟量输出*,该类输出一般可输出4-20mA或者0-10V,用于驱动模拟量设备,比如变频器的频率给定,执行器的速度或角度设定。
5. PLC 面板上的 DC/DC/DC 和 AC/DC/RELAY 表示什么含义?
1、【DC/DC/DC】:
第一个DC:指“CPU模块”供电是*直流*24V;
第二个DC:指“CPU模块”的数字量输入是*直流*24V;
第三个DC:指“CPU模块”的数字量输出是*直流*24V(晶体管)的。
2、【AC/DC/Relay】:
第一个AC:指“CPU模块”供电是*交流*220V;
第二个DC:指“CPU模块”的数字量输入是*直流*24V;
第三个Relay:指CPU模块”的数字量输出是*(继电器)输出*的。
6. PLC是循环顺序扫描的工作方式,其一个周期一般有哪些阶段?
对用户程序的循环扫描执行过程,可分为*输入采样*、*程序执行*、*输出刷新*三个阶段
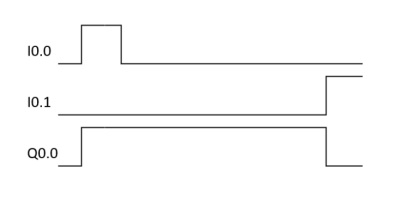
7. 调试程序,具体分析下图起保停PLC程序的功能;基于自己绘制的I0.0、I0.1的波形,画出Q0.0的波形图
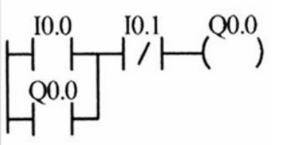
分析:这是一个标标准准的启动—保持—停止PLC程序,I0.0为启动开关,Q0.0为执行线圈,只要得电便会使常开触点Q0.0闭合,形成自锁,也就是保持状态。而程序的停止则由I0.1开关(常闭触点)控制,只要I0.1开关断开,那么Q0.0线圈失电,从而使常开触点Q0.0回到原初始状态,起到停止作用。
波形图如下:
8. 调试下图中的程序,根据结果说明此程序的问题
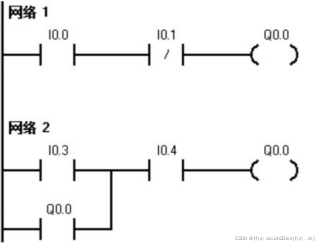
分析:存在的问题:多线圈,PLC会乱套,编写程序时一定要避免多线圈的使用。
9. 通过调试,请分析下图PLC程序存在的问题
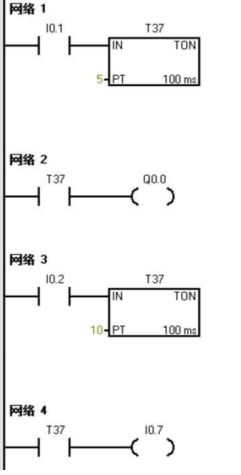
分析:重复使用定时器T37,网络3的定时器应该换成T38;还有网络4的线圈不应该用I0.7开关量。
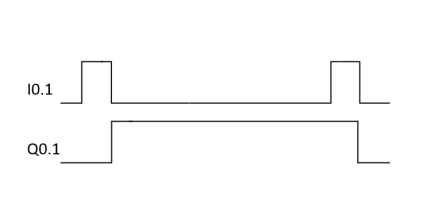
10. I0.1连接机床上工作灯的开关控制按钮,Q0.1连接机床上的工作灯,I0.1与Q0.1之间的逻辑控制关系如PLC程序所示。调试程序,具体分析PLC程序的功能;基于自己绘制的I0.1的波形,画出Q0.1的波形图
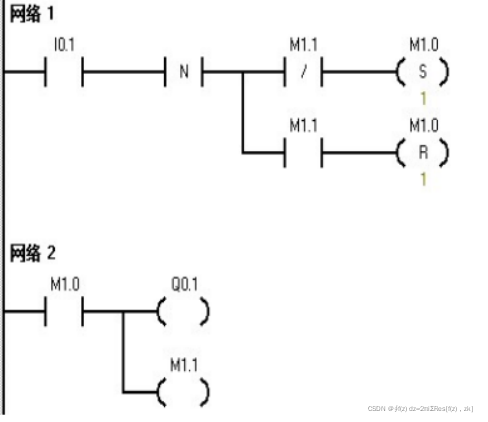
分析:该程序由开关I0.1控制灯亮/灯灭,当I0.1拨通并再断开后,网络1中检测到一个下降沿,使程序导通,M1.0线圈先置位从而使网络2中的常开触点M1.0接通,这时线圈Q0.1和线圈M1.1均得电,网络1中的常开触点M1.1接通(常闭触点M1.1断开),但I0.1是断开的从而不能使M1.0线圈复位,即线圈Q0.1一直保持得电状态。
当I0.1再次拨通并再断开后,网络1中检测到一个下降沿,使程序导通,从而使M1.0线圈复位,网络2中的常开触点M1.0恢复初始状态,即线圈Q0.1和线圈M1.1均失电,网络1中的常开触点M1.1恢复初始状态(常闭触点M1.1也恢复初始状态),且I0.1断开,于是线圈Q0.1一直保持断电状态。
波形图如下:
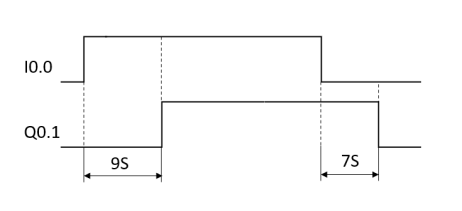
11. I0.0连接某电机的启停控制开关,Q0.1连接控制电机运行的接触器线圈,I0.0与Q0.1之间的逻辑控制关系如PLC程序所示。调试程序,具体分析PLC程序的功能;基于自己绘制的I0.0的波形,画出Q0.1的波形图
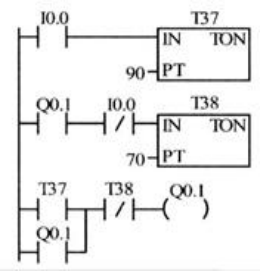
分析:电机的启动与停止由开关I0.0控制,当常开触点I0.0接通(常闭触点I0.0断开),定时器T37开始计时,计时到9秒后常开触点T37接通,于是线圈Q0.1得电,并形成自锁,电机一直处于运行状态。
当常开触点I0.0恢复初始状态(常闭触点I0.0恢复初始状态),定时器T38开始计时,计时到7秒后常闭触点T38接通(断开状态),从而使线圈Q0.1失电,电机停转。
波形图如下:
12. 请说明 MD20、MW20、MB20、M20.0~M20.7 的关系
M是标志存储器,M存储器最多32个(256个位,32个字节,16个字),MB0~MB31
M0是位地址(比如M0.0,M0.1),MB0是字节地址(包括8个位地址,从M0.0~M0.7),MW0是字地址(包括MB0和MB1,即M0.0~M1.7共16个位地址,常用于寄存16位数据),MD0是双字地址(包括MW0和MW1,即M0.0~M3.7共32个位地址,常用于寄存32位数据)。
MD20是由MW20和MW22两个字构成。
MD20=MW20+MW22=M20.0~7+M21.0~7+M22.0~7+M23.0~7。
MW20是16位整型数据,是由MB20和MB21两个字节组合而成的,MW20分解成位就包括M20.0, M20.1, M20.2, M20.3, M20.4, M20.5, M20.6, M20.7, M21.0一直到M21.7合计16个位。
13. 请说明 VD16、VW16、VB16、V16.0~V16.7 的关系
V是变量存储器,V存储器最多可达到几千~几万个。
VD16是由VW16和VW18两个字构成。VW16是由VB16和VB17两个字构成。
VB16分解为位:V16.0~ V16.7
14. 请说明PLC电气控制系统的设计步骤
(1)首先分析被控对象的工艺条件和控制要求
(2)确定I/O口设备
(3)选择合适的PLC类型
(4)分配I/O点
(5)编写梯形图程序
(6)进行软件测试
(7)应用系统整体调试
(8)编制技术文件
15. 编写 PLC 程序时可用哪些S7-200的内部软元件?
输入寄存器I、输出寄存器Q、模拟量输入(只读) AIW、模拟量输出(只写) AQW、变量存储器(V)VB、局部存储器(L)1LB0、位存储器(M)M、特殊存储器(SM)、定时器T、计数器C、高速计数器HC、顺序控制继电器S、累加器寄存器AC。
16. CPU224 有多少输入点、输出点?
CPU224有14个输入点,10个输出点。
17. PC 通过什么和 PLC 连接,PLC 端的连接口是什么接口?
在断电状态下,连接好PC/PPI电缆,便可实现连接。串口连接(485接口)
COM公共端是一组I/O点的公共接线端子。若N个I/O点各提供2个端子就需2N个端子,模块尺寸大且增加成本;优化设计把一组I/O点内部一端相通连接为公共端子,一组N个I/O点只需(N+1)个端子。
18. 某跑马灯 PLC 控制系统,有启动、停止开关、6 个灯,请在绘制实训电路图的基础上绘制跑马灯的 PLC 控制电路
跑马灯的实现,即灯的亮、灭沿某一方向依次移动。按下SB0启动按钮,三个灯依次点亮,当下一个灯点亮时上一个灯同时熄灭,并循环。按下停止按钮SB1灯熄灭,不再循环。
控制电路图如下:
19. S7-200 有哪几种定时器,有哪几种计数器?
西门子200系列的PLC定时器有三种:TON(延时接通定时器),TONR(掉电保护延时接通定时器),TOF(断开延时定时器)。
定时器是对时间间隔计数。定时器的分辨率(时基)决定了每个时间间隔的长短。
TON、TONR和TOF定时器提供三种分辨率:1ms、10ms和100ms。(当前值的每个单位均为时基的倍数。例如,使用10 ms定时器时,计数50表示经过的时间为500ms)。
计数器有加计数,减计数,加减计数。复位后当前值为0或者设定值,位状态为0。
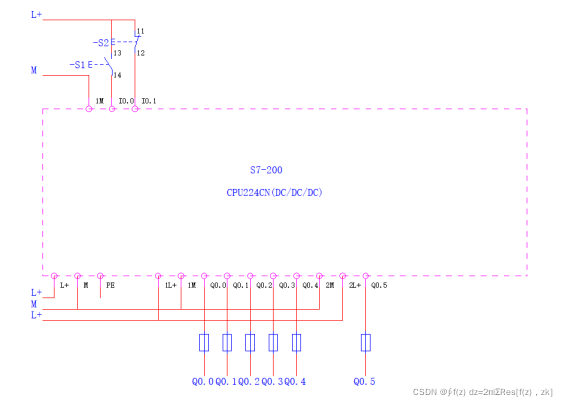
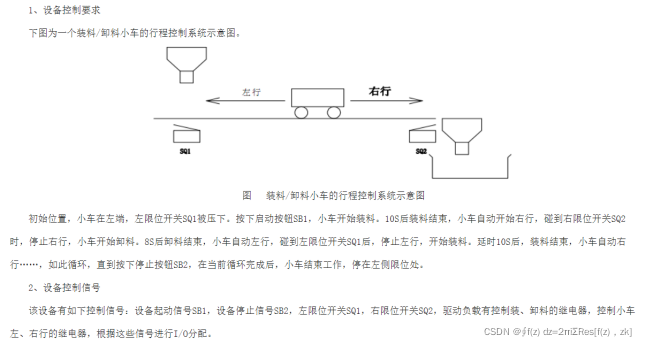
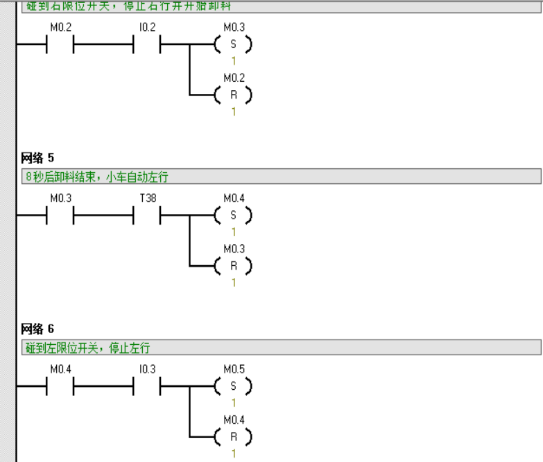
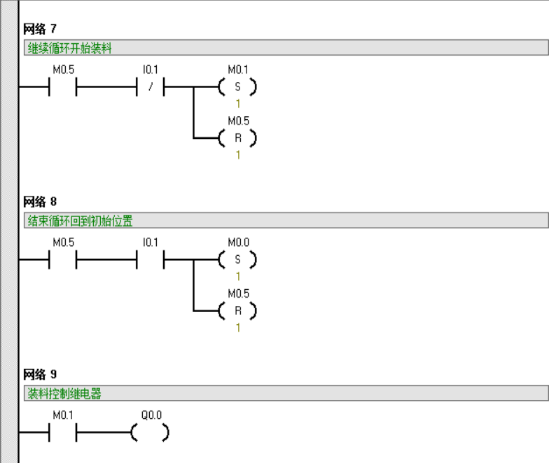
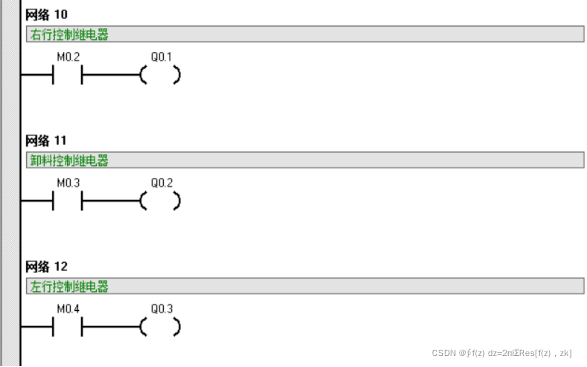
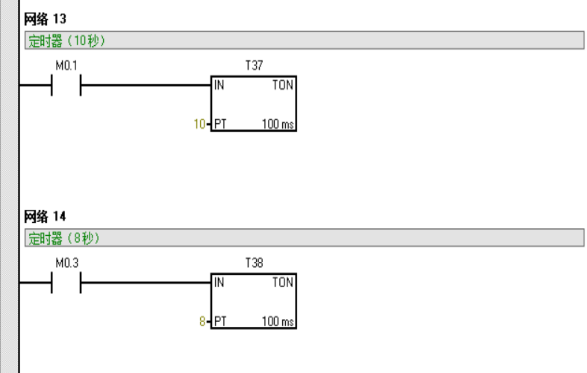
20. 请用顺控设计方法实现某例子:装料/卸料小车任务
例子:装料/卸料小车
I/O地址分配表
| 编程元件 | I/O端子 | 电路器件 | 作用 |
|---|---|---|---|
| I0.0 | SB1 | 输入继电器 | 启动键 |
| I0.1 | SB2 | 输入继电器 | 停止键 |
| I0.2 | SQ2 | 输入继电器 | 右限位开关 |
| I0.3 | SQ1 | 输入继电器 | 左限位开关 |
| Q0.0 | KA0 | 输出继电器 | 装料控制继电器 |
| Q0.1 | KA1 | 输出继电器 | 右行控制继电器 |
| Q0.2 | KA2 | 输出继电器 | 卸料控制继电器 |
| Q0.3 | KA3 | 输出继电器 | 左行控制继电器 |
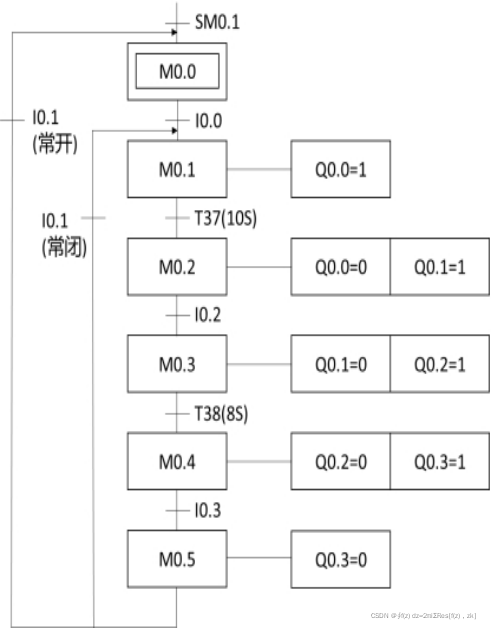
首先绘制顺控流程图:
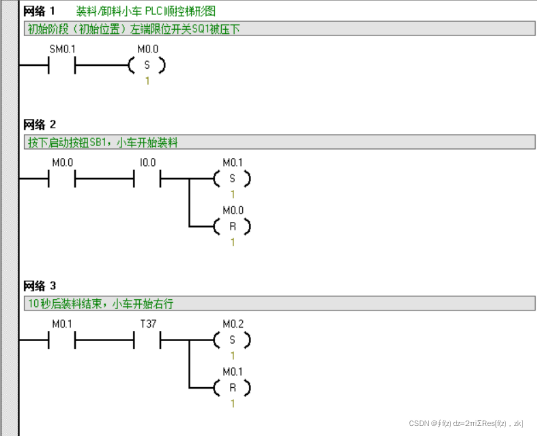
编写梯形图:



















 440
440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











