






一、通讯基础
1处理器与外部设备通讯的两种方式:
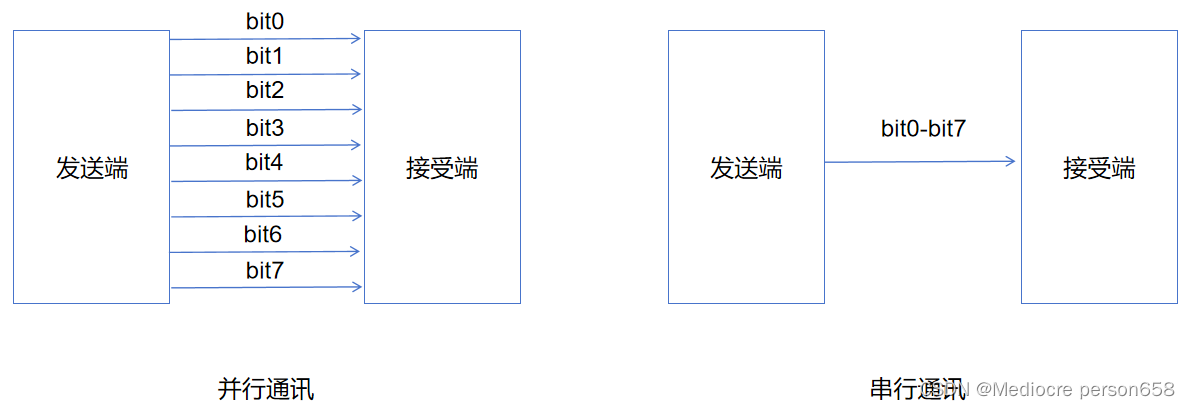
并行通讯:
传输原理:数据各个位同时传输
优点:速度快
缺点:占用引脚资源多
串行通讯:
传输原理:数据按位传输
优点:占用引脚资源少
缺点:速度相对较慢
2.常见的串行通讯接口

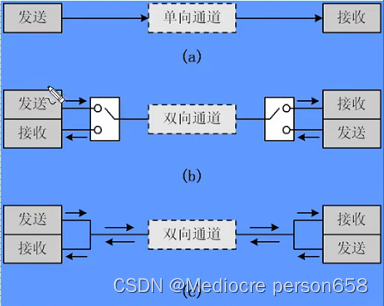
3.串行通讯的分类
- 单工:数据传输只支持数据在一个方向上传输;
- 半双工:允许数据在两个方向上传输。 但是,在某一时刻,只允许数据在一个方向上传输 ,它实际上是一种切换方向的单工通信; 它不需要独立的接收端和发送端,两者可以合并一起使用一个端口 。
- 全双工:允许数据同时在两个方向上传输 。 因此,全双工通信是两个单工通信方式的结合, 需要独立的接收端和发送端 。
二、串口常用寄存器
状态寄存器:USART_SR
其作用就是用于描述USART的工作状态,为编程者提供一个串口的实时状态,发送时需要判断上一帧有没有发送完毕;接收时需要判断一帧数据有没有接收完毕。
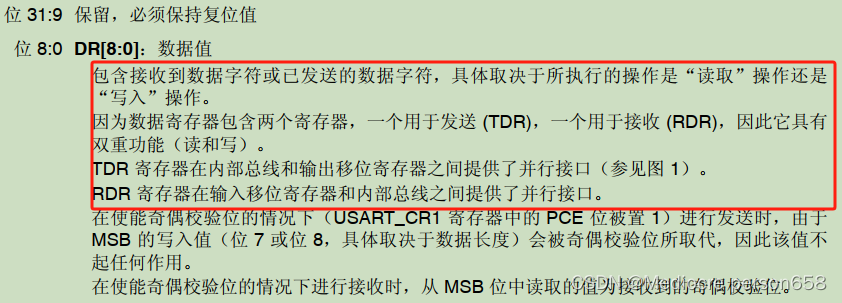
数据寄存器:USART_DR
发送和接收是两个数据寄存器,但实际在单片机内部是一个,这两个寄存器的唯一区别方法就是,执行写操作就是发送数据寄存器(TDR),执行读操作的时候就是接受数据寄存器(RDR)。
波特率寄存器:USART_BRR
该寄存器的4-15位就是写入DIV的整数部分,0-3位就是写入DIV的小数部分。

控制寄存器:USART_CR
控制寄存器1(USART_CR1),控制寄存器2(USART_CR2)
三、配置步骤
1.串口时钟和GPIO时钟使能
串口是挂载在APB2下的外设,所以使能函数为
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能 USART1 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能 GPIOA 时钟2.设置引脚复用映射(GPIO_PinAFConfig() )
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //PA9 复用为 USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);//PA10 复用为 USART13.GPIO端口模式设置(GPIO_Init(); )
注意:PA9和PA10要设置为复用功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9 与 GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度 50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化 PA9, PA104.串口参数初始化(USART_Init(); )
USART_InitStructure.USART_BaudRate = bound;//一般设置为 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口5.使能串口(USART_Cmd(); )
USART_Cmd(USART1, ENABLE); //使能串口6.数据的接受和发送
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);//发送
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);//接受7.串口状态获取
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);8.开启中断并初始化NVIC,使能相应中断(NVIC_Init(); )
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化 VIC 寄存器9.获取相应中断状态
判断该中断是哪个中断
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT)判断串口是否完成中断
USART_GetITStatus(USART1, USART_IT_TC)10.编写中断服务函数
void USART1_IRQHandler(void) ;四、串口实验
补充:
USART_RX_STA是16位的数据,原子定义了最高位15是接收完成标志位USART_RX_STA[15]=1时表示接收完成。所以0x8000好理解吧,就是最高位为1其他都为0,跟USART_RX_STA相与,低15位都被置0了只留下最高位即接收完成标志位,所以就可以通过USART_RX_STA&0x8000这样的方式来判断是否接收完成。USART_RX_STA与0X3FFF进行与运算是用来确定接收到的数据长度的
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接受中断(接受到的数据必须是以0x0D 0X0A结尾)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接受到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //未接收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}本文为个人笔记,仅代表个人见解和学习程度,不喜勿喷。















 4947
4947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









