






目录
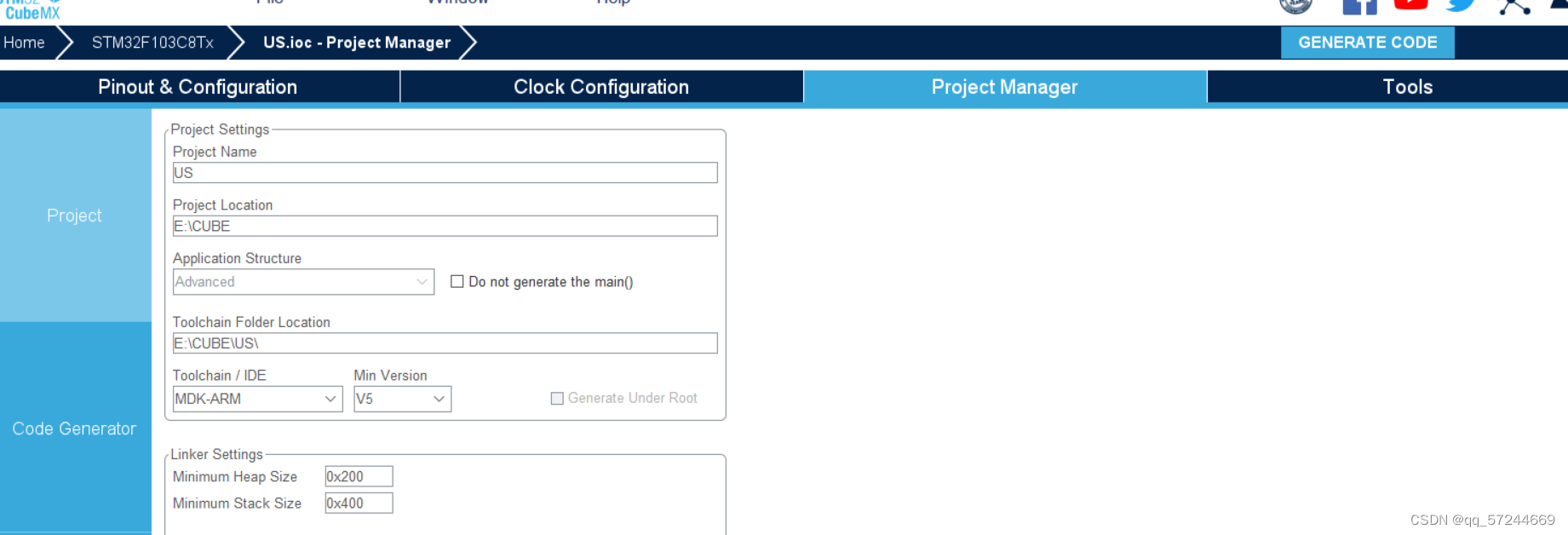
(一)Cubmx配置
串口配置
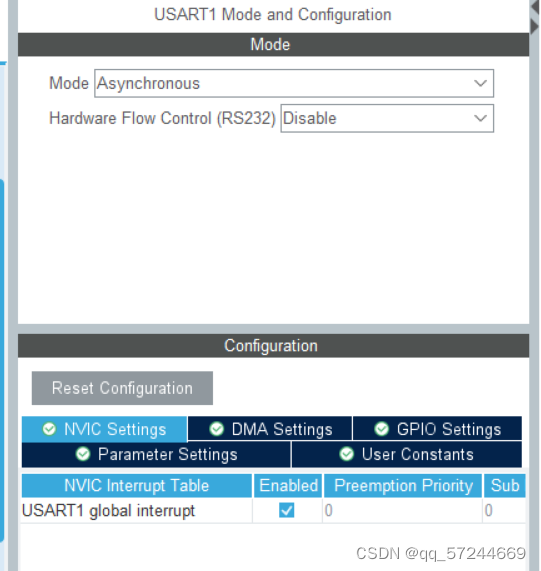
选择中断

时钟选择:
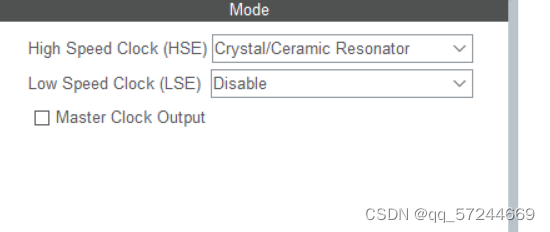
根据板子不同设置不同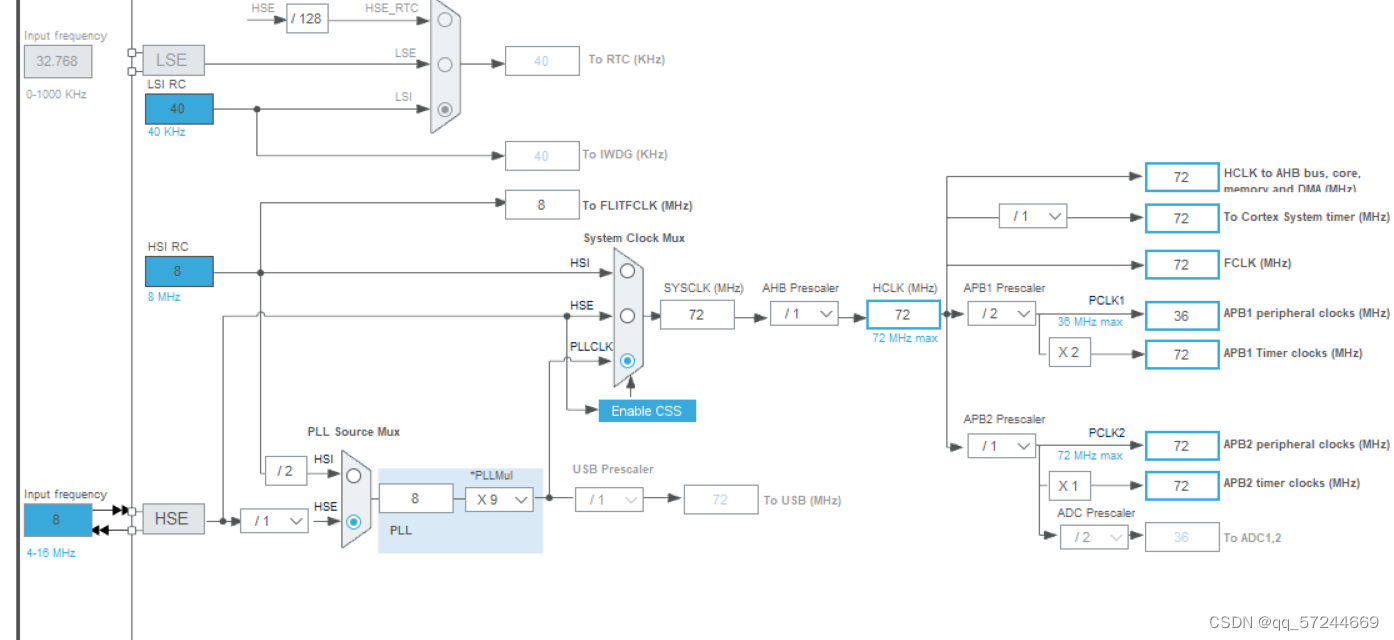
配置完之后便可以直接生成代码了
功能:
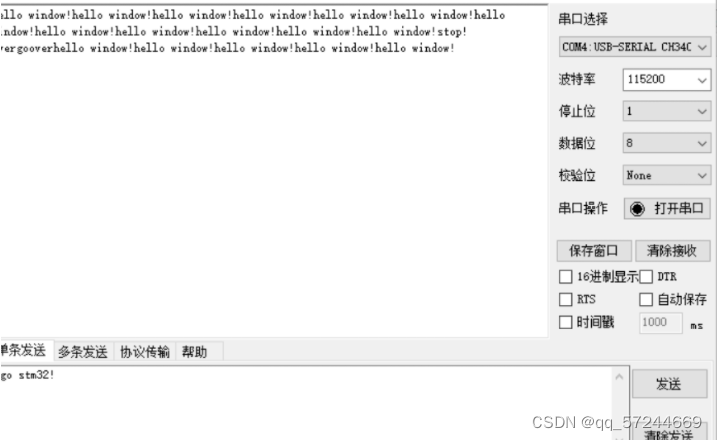
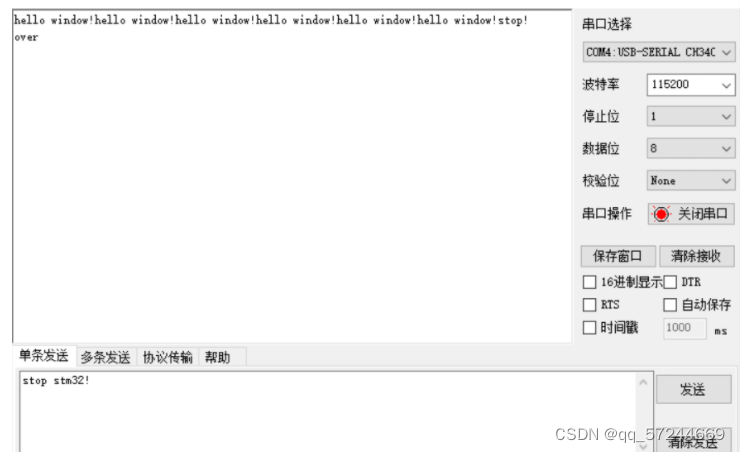
stm32接收到字符“s”时,停止持续发送“hello windows!”; 当接收到字符“t”时,持续发送“hello windows!”(提示:采用一个全局标量做信号灯);2)当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(提示:要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
(二)main函数设置:
代码:
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <string.h>
void SystemClock_Config(void);
char c;//指令 0:停止 1:开始
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
char tips3[20]="go stm32!";//提示2
char tips4[20]="stop stm32!";//提示3
int flag=1;//标志 0:停止发送 1.开始发送
char *s;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置接受中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
//当flag为1时,每秒发送一次信息
//当flag为0时,停止
while (1)
{
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
}
}
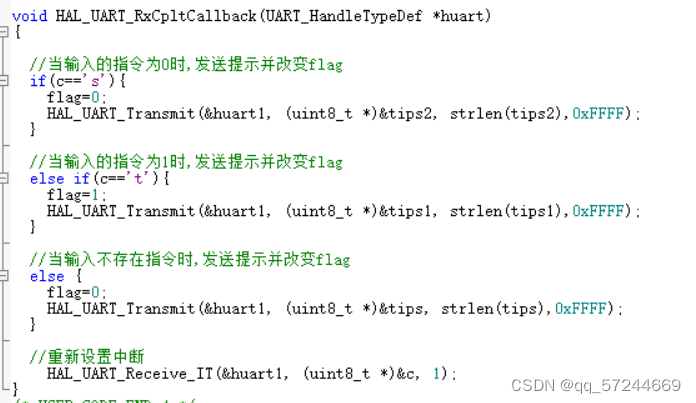
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='s'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='t'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
/* USER CODE END 4 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
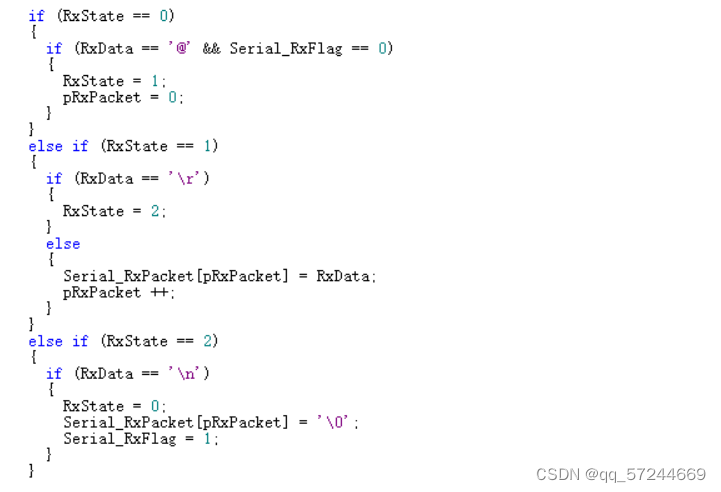
这里每接收一个字符便会进入中断一次。然后可以对接收到进行判断。
对于字符串的接收需要将每一次接收的字符分别放入字符串数组。
字符串控制:
每进入一次中断便加入一次:
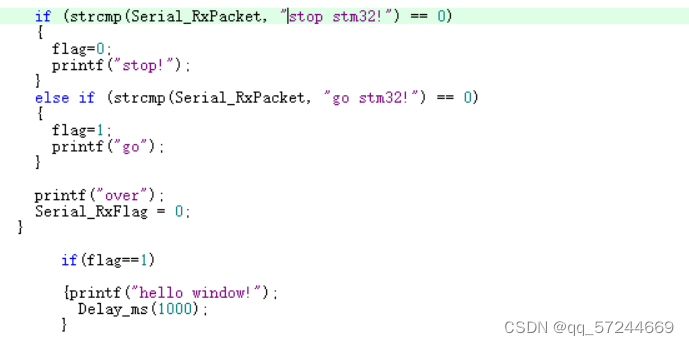
结果:















 5385
5385











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









