







⛳️ 粉丝福利活动
-
✅参与方式:通过连接报名观看课程,即可免费获取精美周边
-
⛳️活动链接:《自动驾驶新人之旅》
-
📆 活动时间长期有效 | 课程姓名填写
鸽芷咕学号1111
完成后加博主微信填写问卷领取礼品,也可根据《活动步骤》 完成领取
🔥 注:可以拉取进度条观看,超过%50即可领取百度周边

⛳️ 文章末尾扫码加入粉丝群,不定期发放粉丝福利,各种专业书籍免费赠送!
引言
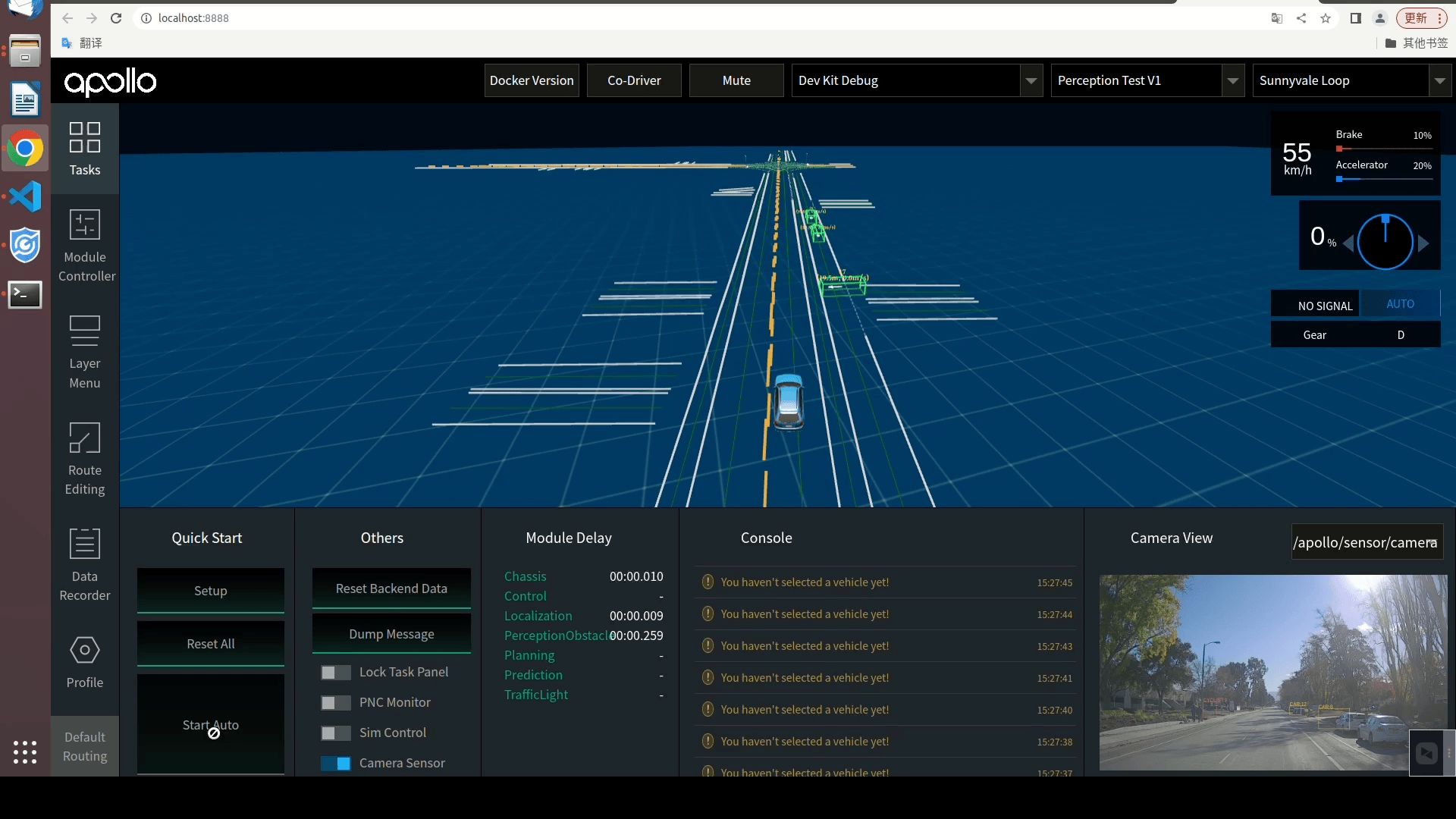
在自动驾驶技术中,感知模块是自动驾驶系统中的核心组成部分之一。Apollo平台的感知模块扮演着关键角色,负责从多种传感器中采集数据,对车辆周围环境进行感知和理解。
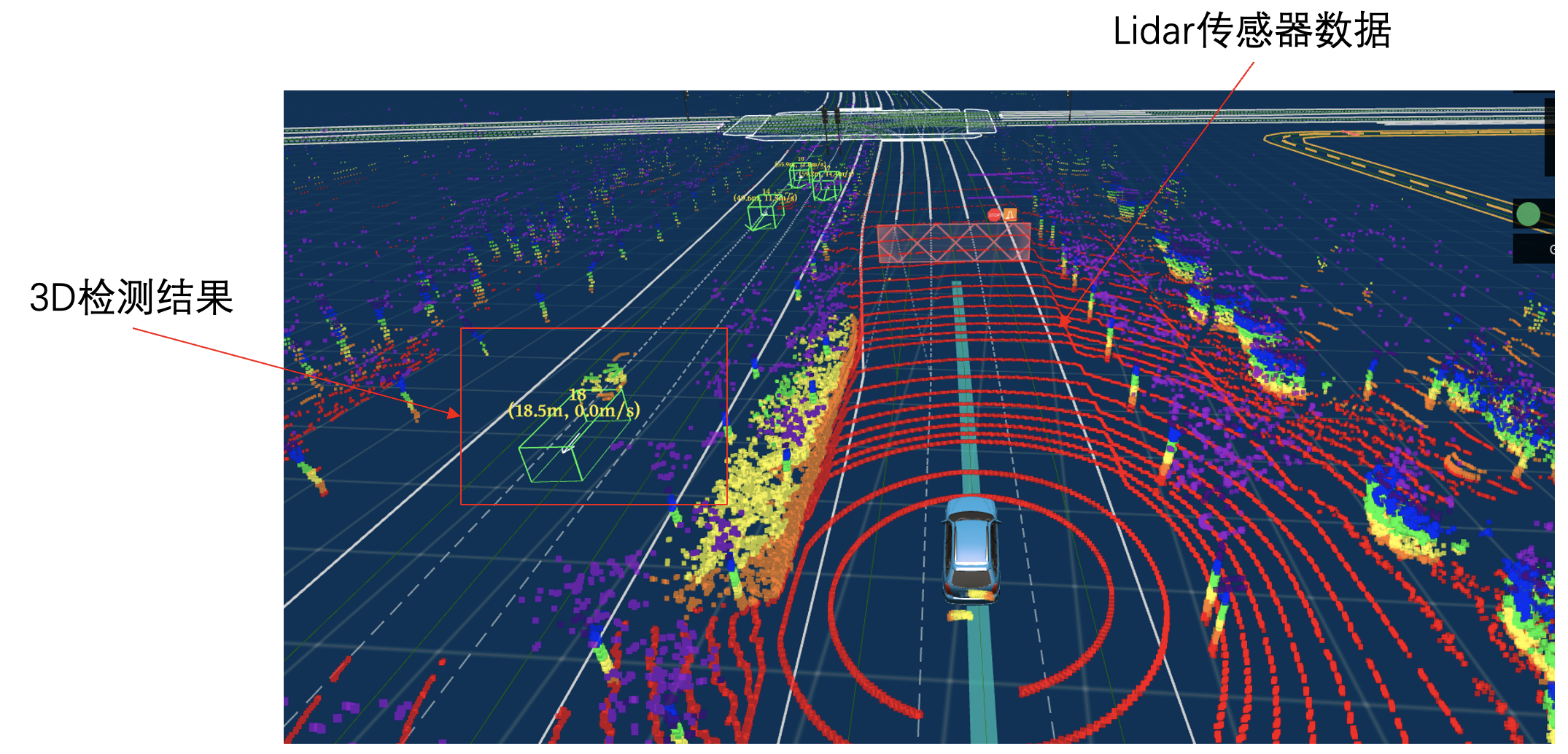
一、传感器融合
Apollo平台集成了多种传感器,包括激光雷达、摄像头、雷达等。这些传感器各自提供不同类型的数据,如激光雷达提供距离信息,摄像头提供图像信息等。感知模块通过传感器融合技术,将这些不同传感器的数据融合在一起,以获取更全面、准确的环境信息。
1.1 传感器融合具体介绍
1. 多传感器数据源:
Apollo系统使用多种类型的传感器,每种传感器都有其独特的特性和适用场景。激光雷达通常用于高精度的障碍物检测,摄像头用于视觉感知,而毫米波雷达则对不同天气条件有较好适应性。
2. 传感器数据融合:
传感器融合的核心在于将来自不同传感器的信息融合在一起,以提高环境感知的准确性和鲁棒性。这通常涉及到使用传感器融合算法,如卡尔曼滤波、扩展卡尔曼滤波(EKF)等,来整合各种传感器的测量值。
3. 激光雷达:
用于高精度的地图构建和障碍物检测。激光雷达能够提供准确的距离和角度信息,适用于近距离高精度感知。
4. 摄像头:
提供视觉信息,用于目标检测、车道线检测等。视觉感知在复杂的交通环境中发挥重要作用,但受到光照、阴影等因素的影响。
5. 毫米波雷达:
适应不同天气条件,如雨雪天气。毫米波雷达可以在恶劣天气下提供可靠的障碍物检测。
6. GNSS和惯性导航系统(INS):
用于车辆的定位。全球导航卫星系统(GNSS)提供全球位置信息,而惯性导航系统使用加速度计和陀螺仪等传感器来估计车辆的加速度和角速度。
7. 传感器校准:
为确保融合的准确性,Apollo进行传感器的定期校准。这包括内部校准,如相机和激光雷达的内部参数校准,以及外部校准,例如将激光雷达与车辆坐标系对齐。
二、 目标检测
在传感器融合的基础上,感知模块使用先进的目标检测算法来识别和定位车辆周围的目标物体。目标可以包括其他车辆、行人、交通标识等。目标检测是感知模块的关键步骤,为后续决策和规划提供了重要的信息。
目标检测代码示例:
// 示例代码
#include <apollo/sensors/lidar.h>
#include <apollo/perception/object_detection.h>
int main() {
// 初始化激光雷达
Lidar lidar;
lidar.Init();
// 获取激光雷达数据
LidarData lidar_data = lidar.GetLidarData();
// 目标检测
ObjectDetection object_detection;
std::vector<Object> detected_objects = object_detection.DetectObjects(lidar_data);
// 处理检测结果
for (const auto& obj : detected_objects) {
std::cout << "Detected Object: " << obj.type << " at (" << obj.x << ", " << obj.y << ")\n";
}
return 0;
}
三、障碍物识别
通过目标检测,感知模块能够判断识别出的目标物体对车辆行驶的影响,并将其分类为障碍物。障碍物识别的结果对自动驾驶系统的决策和规划阶段具有重要意义,帮助系统避免碰撞和安全行驶。
四、模型管理
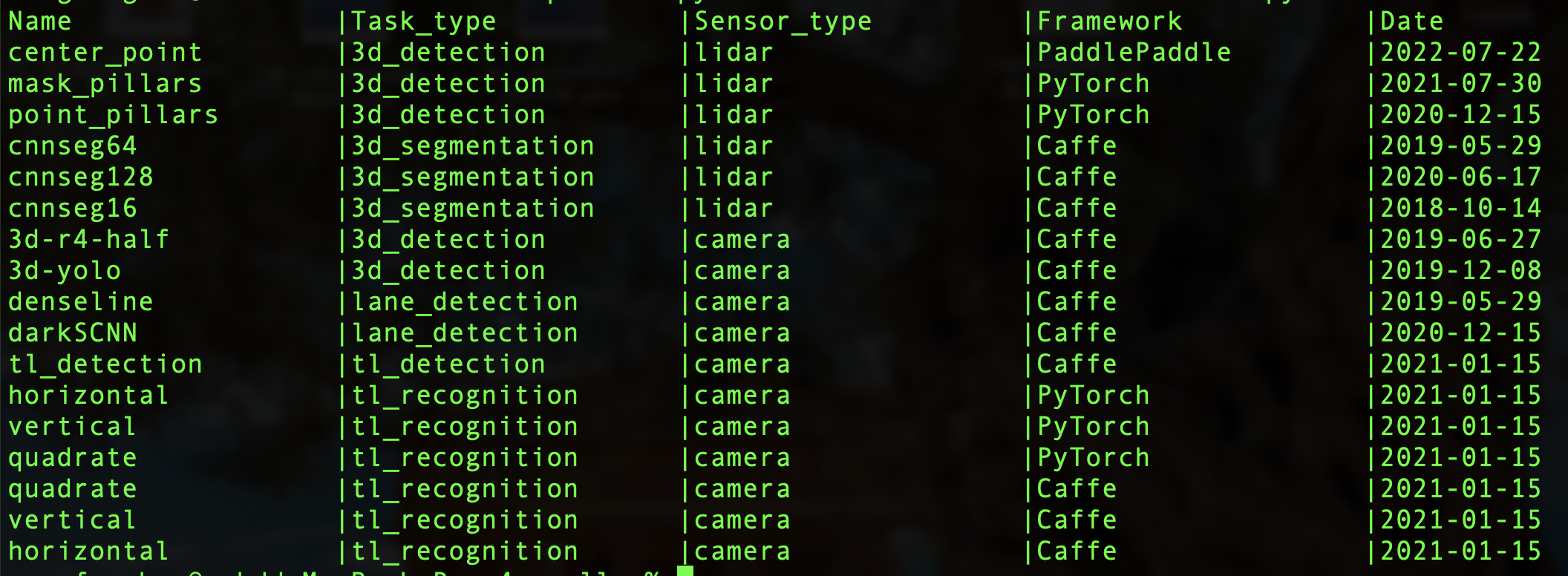
Apollo 8.0中还引入了模型Meta和模型管理。其中,模型Meta中包含了模型的基本信息,如名称、任务类型、传感器类型、框架和训练所需的数据集,同时还包含了模型的标准输入、输入、前后处理、模型文件存放的路径等。通过这些信息对模型进行标准化,开发者只需要保证模型的输入和输出一致,就可以直接替换模型从而提升模型开发效率。
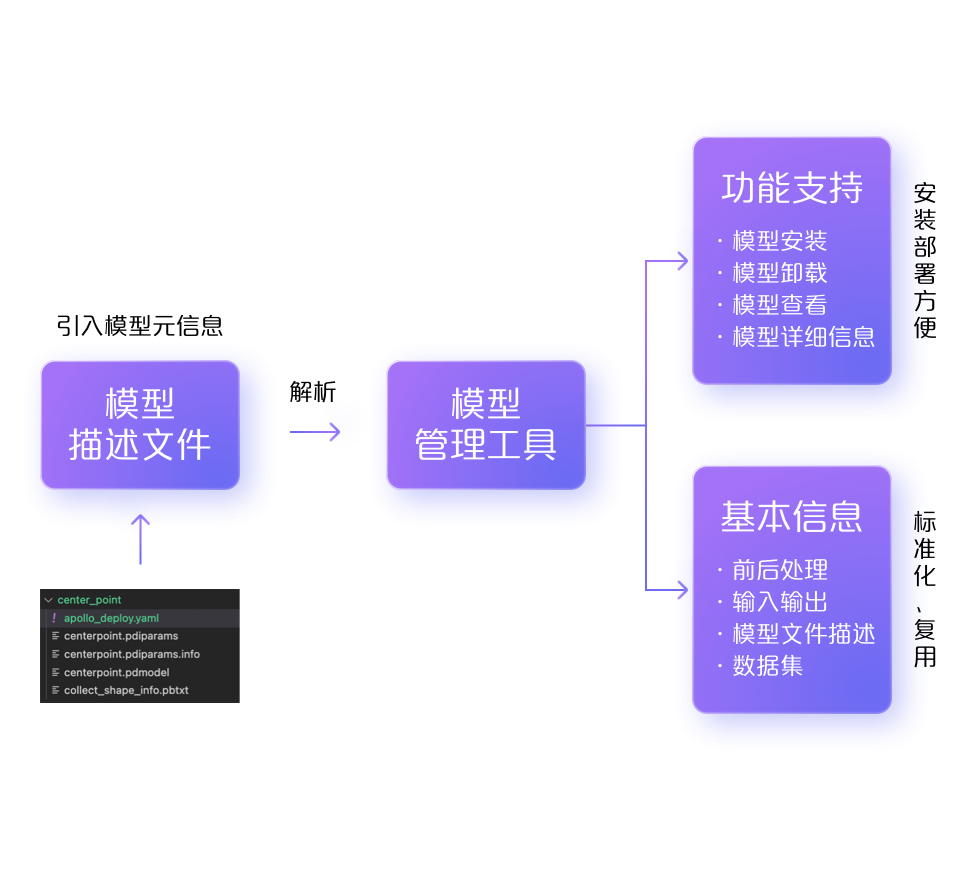
并且还提供了模型管理工具,开发者可以通过该工具下载安装模型仓库中的模型,展示系统中已经安装的模型和模型的详细信息。并且管理这些模型,实现模型部署效率提升。
具体使用方法大家可以去官方问文档查看哦
结语
感知模块的高效工作是实现安全自动驾驶的重要保障,为后续的决策和控制模块提供了必要的信息基础。希望本文能够帮助开发者更好地理解和应用Apollo平台的感知功能,推动自动驾驶技术的不断发展。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











