







Paper Title: RadarCam-Depth: Radar-Camera Fusion for Depth Estimation with Learned Metric Scale
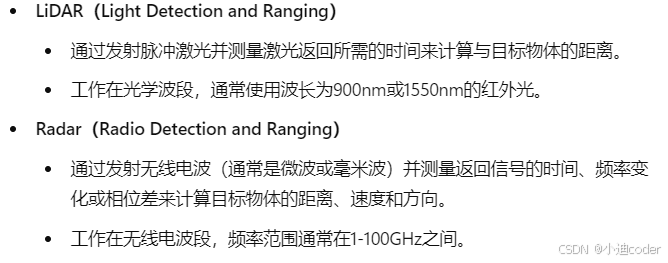
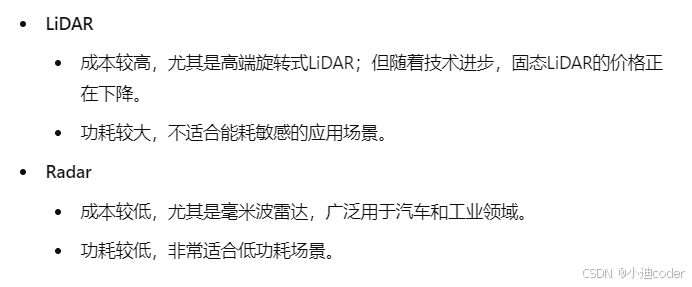
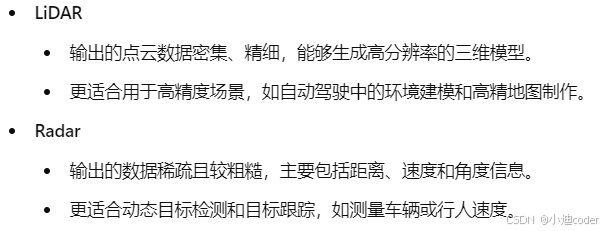
Lidar与Radar的区别:

本文提出的方法与以往方法之间的比较:

以下图展示了RadarCam-Depth方法的深度估计效果及其与传统单目深度估计的对比:
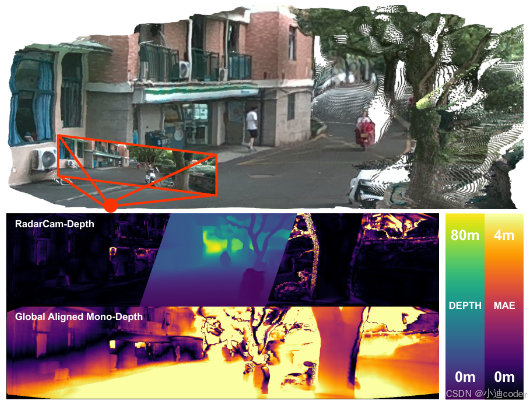
顶部:三维可视化的RadarCam-Depth方法的度量深度估计结果
中部:RadarCam-Depth估计结果叠加误差图
底部:经过雷达点对齐的单目深度估计误差图
单目深度估计领域存在的问题: 尺度模糊性问题。
尺度模糊性问题(Scale Ambiguity Problem)是单目深度估计领域的一个核心挑战,指的是从单张图像中很难直接获取绝对的物理尺度信息。其根本原因在于,单目相机在捕获三维场景时会将三维信息投影到二维平面上,导致深度信息的丢失,而这一信息丢失无法通过单张图像直接恢复。
单目图像只能提供相对深度。——可以结合相机的内外参数标定进行绝对深度的恢复。
通过惯性数据来提供尺度信息方法:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









