






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
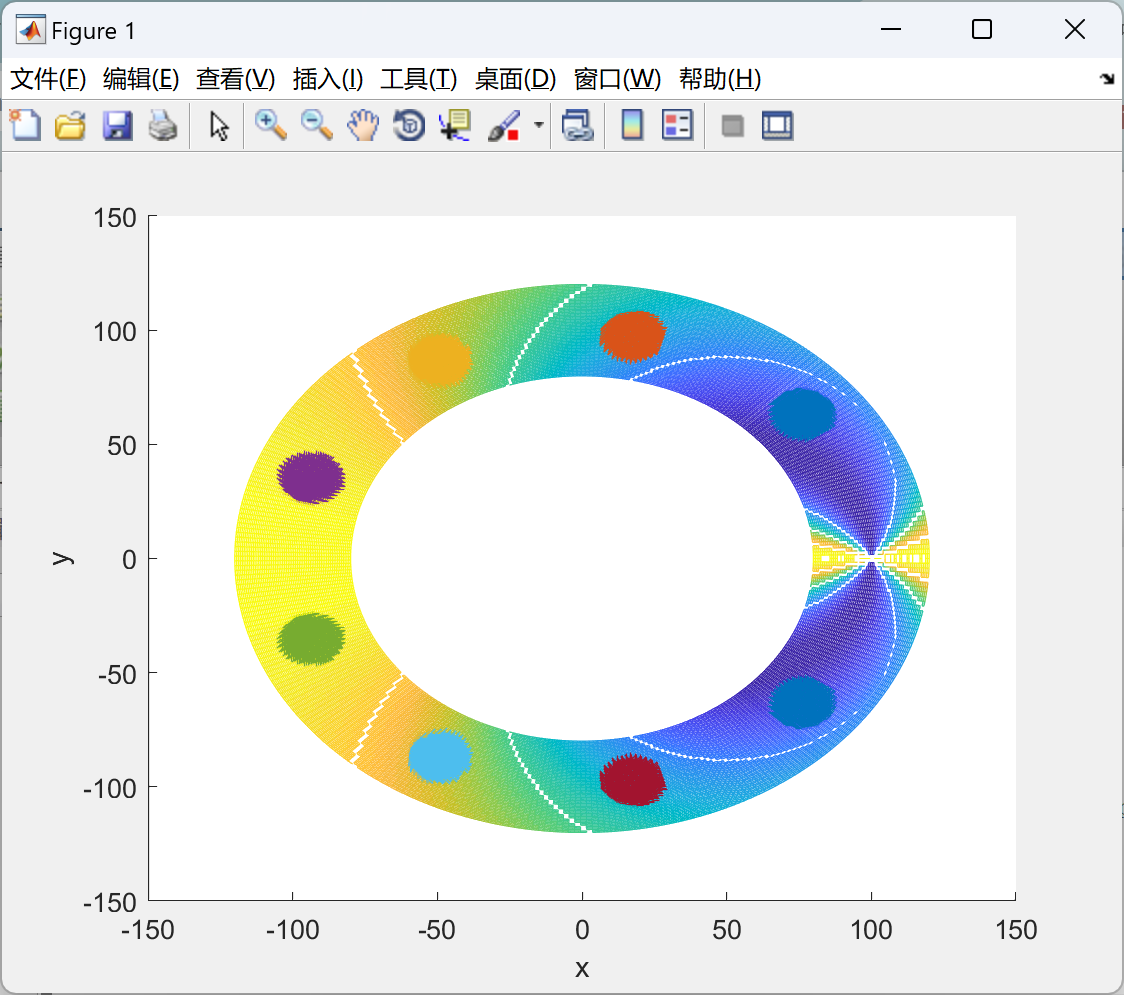
在纯定向被动定位视角下的无人机群定位调度方法旨在通过利用传感器等设备被动地获取目标位置信息,从而实现无人机群的准确定位和有效调度。首先,在待监测区域内布置一定数量的传感器,这些传感器可以是雷达、红外线传感器、摄像头等,用于被动地探测目标的位置信息。传感器将获取到的目标位置数据传输至中心控制系统。中心控制系统接收传感器传来的目标位置数据,并利用这些数据对目标进行定位和跟踪。通过对多个传感器数据的融合和处理,确定目标的精确位置,并持续跟踪目标的运动轨迹。基于目标位置信息,中心控制系统利用调度算法对无人机群进行有效的调度和分配任务。根据目标的位置、速度、运动轨迹等信息,动态调整无人机的飞行路径和速度,以最优的方式实现对目标的监测和跟踪。无人机群内部的协同作战和合作控制是实现有效调度的关键。通过通信网络实现无人机之间的信息交换和协同控制,使得无人机群能够共同完成复杂的监测、跟踪和任务执行。纯定向被动定位视角下的无人机群定位调度方法通过充分利用传感器获取的目标位置信息,结合有效的调度算法和协同控制策略,实现了对目标的准确监测、跟踪和任务执行,具有重要的应用价值和实用性。
📚2 运行结果

主函数部分代码:
clear;
close all;
PT = [];
count = 0;
for i = 1:5
for j = 1:i
count = count+1;
if ~ismember(count,[1,11,15])
PT=[PT;[-25*(i-1)+50*(j-1),25*sqrt(3)*(i-1)]];
end
end
end
FY = [...
-51.5217 16.7795;
27.8559 46.1572;
-94.8564 41.7461;
25.6875 112.2901;
60.1980 96.8005;
-39.2831 165.6207;
23.8277 178.7315;
67.9484 172.8523;
65.9515 120.8553;
-99.9659 123.2392;
4.0878 177.2929;
20.7731 143.9781];
near = zeros([12,12]);
chozen_index = ones([12,1]);
chozen = zeros([12,1]);
for i = 1:12
near(i,:) = find_nearest(FY(i,:),PT);
chozen(i,1) = near(i,1);
end
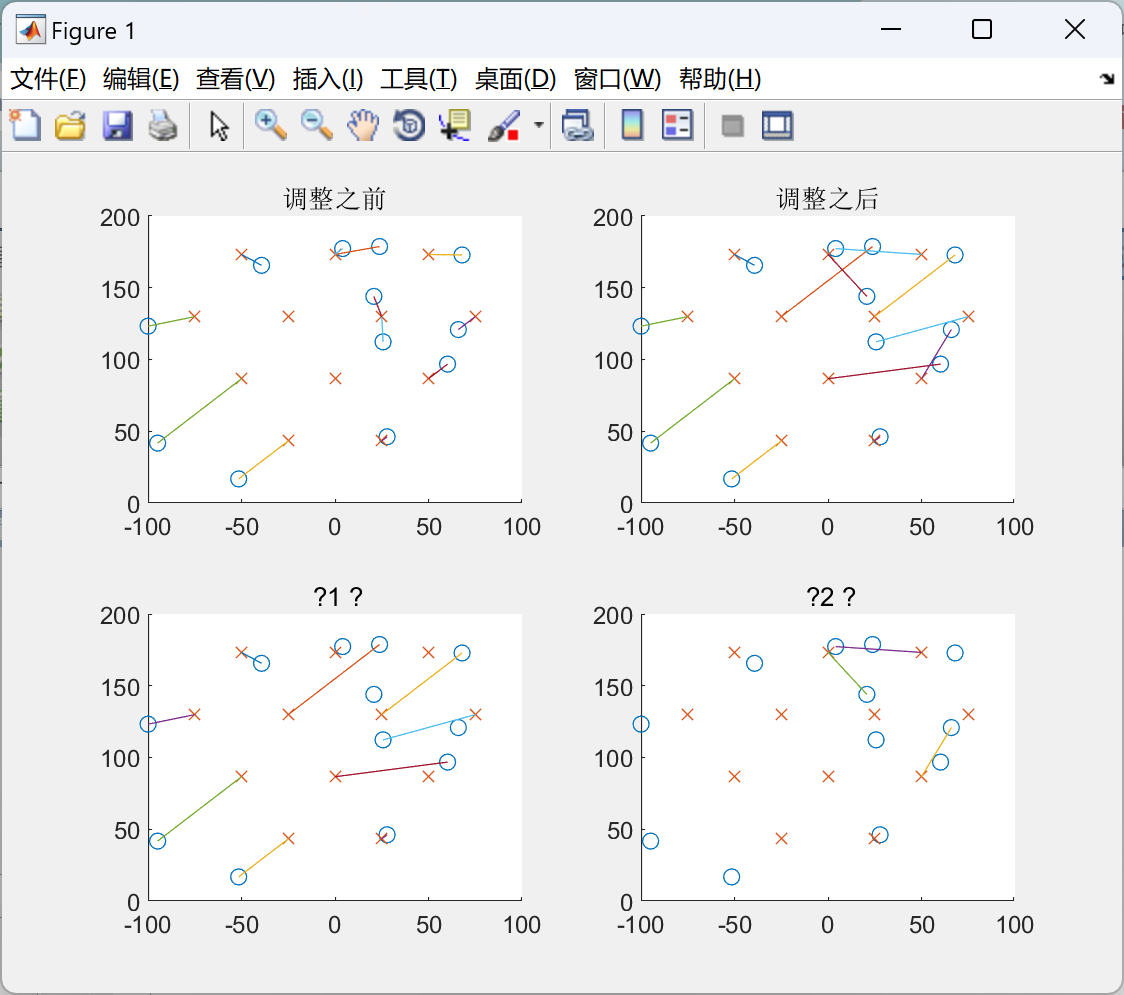
subplot(2,2,1);
hold on;
scatter(FY(:,1),FY(:,2));
scatter(PT(:,1),PT(:,2),'x');
for i = 1:12
plot([FY(i,1),PT(near(i,1),1)],[FY(i,2),PT(near(i,1),2)]);
end
hold off;
title('调整之前');
b_ok = false;
disp(chozen');
while ~b_ok
b_ok = true;
for i = 1:12
if count_times(chozen(i),chozen)>1
b_ok = false;
chozen_index(i)=chozen_index(i)+1;
chozen(i)=near(i,chozen_index(i));
end
end
disp(chozen');
end
subplot(2,2,2);
hold on;
scatter(FY(:,1),FY(:,2));
scatter(PT(:,1),PT(:,2),'x');
for i = 1:12
plot([FY(i,1),PT(chozen(i),1)],[FY(i,2),PT(chozen(i),2)]);
end
hold off;
title('调整之后');
fly = [];
no = 0;
while size(fly,2)<12
no = no+1;
cross_count = zeros([12,1]);
set_parent = 1:12;
for i = 1:12
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]安述祥,宋公飞,尹资荣,等.基于事件触发机制的随机时延无人机编队控制[J/OL].电光与控制:1-8[2024-05-18].http://kns.cnki.net/kcms/detail/41.1227.TN.20240517.1201.004.html.
[2]许海涛,陈龙胜,王宇翔.改进势场法在无人机编队三维路径规划上的应用研究[J/OL].航空工程进展:1-10[2024-05-18].http://kns.cnki.net/kcms/detail/61.1479.V.20240515.1516.004.html.















 318
318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









