






何德何能让我来研究博士论文
基于高精度地图的城市自动驾驶路径规划方法研究
创新点
1、基于高精度地图的安全驾驶区域生成方法
2、一种基于安全驾驶区域的自适应三层路径规划模型
3、一种基于安全驾驶区域的局部路径规划算法 HDM-RRT
1 绪论
常规跳过
第2章 城市自动驾驶路径规划问题综述
2.1 面向自动驾驶的三类城市道路场景
自动驾驶传感器受影响的干扰:
1、道路场景不规范
2、交通参与者过多
3、影响定位的因素:植被遮挡、施工阻断
4、冗余数据
2.1.1 结构化道路场景定义
标准道路
2.1.2 半结构化道路场景定义
约束较少,比如校园、城市支路、小区
半结构化道路在我国乡村等地十频繁存在的,具有几个特征:
2.1.3 非结构化道路场景定义
2.2 自动驾驶路径规划系统组成架构
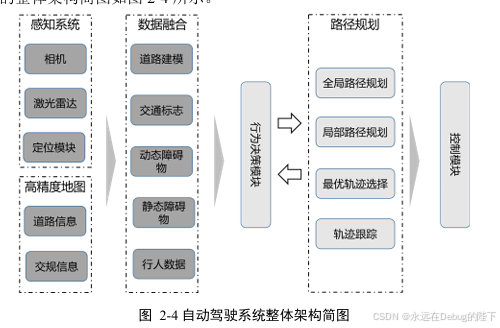
路径规划模块是连接行为决策模块和控制模块的。路径规划模块包括全局路径规划和局部路径规划两个主要步骤。。全局路径规划主 要通过使用高精度地图提供的先验信息进行车辆的总体路线规划,在给定的起点 和终点之间寻找一条最优路线。局部路径规划是基于传感器提供的实时环境信息 与全局路径规划提供的先验引导信息,生成一条或多条安全平滑的可通行轨迹。
其实就是路径规划+轨迹优化
2.3 自动驾驶路径规划问题定义
2.3.1 车辆运动学模型
车辆在道路上运动的时候不能视为一个质点,而应该看作为一个刚体。
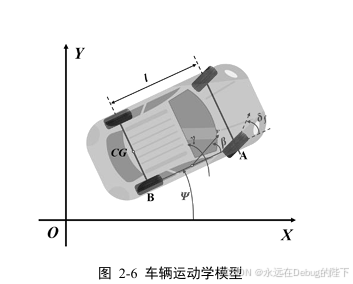
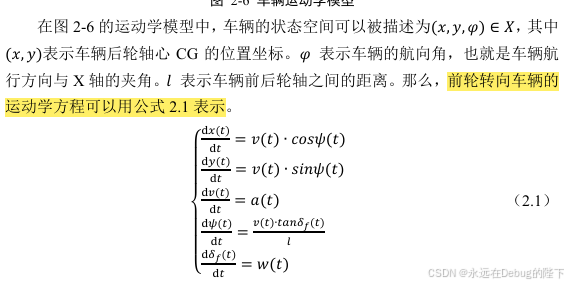
针对fstut进行化简

2.3.2 路径规划问题的定义与术语
2.3.3 路径规划的拓展策略
第3章 基于高精度地图的安全驾驶区域生成方法
-
采样效率提升:通过基于碰撞风险地图的高斯采样方法(CR-GaussianSampling),显著提高了采样点在感兴趣区域(ROI)内的集中度,从而提升了算法的采样效率。
-
节点优化策略:HDM-RRT算法采用基于Clothoid距离的两层节点优化方法,减少了随机拓展树的冗余度,提高了算法的收敛速度和计算效率。
-
代价方程设计:引入碰撞风险系数,通过线性方程加权的方式融合碰撞风险代价和轨迹长度代价,作为决定最优母节点的代价方程。
-
轨迹优化:综合考虑轨迹长度、曲率、危险系数、拟合度等多重因素的代价函数,计算出适合自动驾驶的高质量轨迹。
-
算法约束条件:考虑车辆运动学、交通法规等约束条件,如曲率约束、迂回约束和转弯半径约束,以确保生成的轨迹既安全又可行。
-
实验验证:通过在不同典型道路场景下的实验,验证了HDM-RRT算法相比于RRT算法和DT-RRT算法在采样效率、收敛速度和计算效率方面的优越性。


















 1292
1292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











