







摘要
本论文设计并实现了一种基于STM32微控制器的智能头盔控制系统,针对现代头盔在骑行安全、工地作业等应用场景中的多功能需求,结合多种传感器和控制模块。系统具备自动照明、车辆状态检测、体温监测、心率检测等功能,并通过OLED显示和蜂鸣器报警进行反馈。具体功能模块包括:
-
光照检测与照明控制:系统使用光敏电阻检测环境光照强度,当光照值低于预设的最小阈值时,自动开启头盔上的LED照明灯,以确保在低光环境下的骑行安全。
-
车辆状态检测:通过MPU6050传感器检测车辆的左右转向和刹车状态。当检测到左转、右转或刹车动作时,系统相应地点亮对应的提示灯,提高行车安全性。
-
体温监测:集成红外测温模块实时监测佩戴者的体温,当体温超过预设的安全阈值时,系统通过蜂鸣器发出报警信号,提示佩戴者注意健康状况。
-
心率监测:系统使用基于光电传感原理的心率检测模块,持续监测佩戴者的心率。如果心率值超过预设的最大安全阈值,系统同样通过蜂鸣器报警,以提醒佩戴者避免过度疲劳或可能的健康风险。
-
阈值设置:系统设计了一组按键,允许用户根据个人需求设置各项参数的阈值。通过按键操作,用户可以灵活调整光照强度下限、体温上限和心率上限,使系统更加个性化和实用。
-
数据显示:系统配置了OLED显示模块,实时显示当前光照强度、体温、心率和各项阈值,方便用户随时了解数据和系统状态。
论文详细描述了系统的硬件设计和软件实现过程,包括各传感器模块的选择与接口设计、电路原理图和PCB布局,以及嵌入式软件的开发与调试。通过一系列实验测试和结果分析,验证了系统各个功能模块的有效性和可靠性。
实验结果表明,该智能头盔系统能够在低光环境下自动开启照明,在行车过程中准确检测转向和刹车动作并进行提示,实时监测用户的体温和心率并在异常状况下发出报警,且具有较高的响应速度和准确定程度。系统的设计有效提高了骑行和工作的安全性,具有良好的实用前景。
最后,论文总结了系统的优点和不足,并对未来的研究和改进方向提出了建议,如增加数据无线传输功能、优化功耗管理、集成更多安全检测模块等,以进一步提升智能头盔系统的功能和性能。
前言是毕业论文的开篇部分,通常包括研究背景、研究意义和研究内容的概述。以下是一个详细展开的前言示例:
前言
1. 研究背景
随着社会的发展和人们生活水平的不断提高,骑行作为一种健康、环保的出行方式正逐渐受到大众的青睐。然而,骑行安全问题也日益突出。根据交通事故数据统计,骑行者容易受到路况、环境光照和其他交通参与者的影响,导致事故发生。因此,提高骑行安全性显得尤为重要。此外,在施工场地和其他高风险工作环境中,安全头盔也是工人防护的重要装备。因此,设计一款功能全面、智能化程度高的头盔具有重要的现实意义。
2. 研究意义
智能头盔是可穿戴设备和智能硬件领域的重要研究方向之一,通过集成各种传感器和电子控制模块,可以实现诸如自动照明、实时健康监测、运动状态检测等诸多功能,有效提升使用者的安全保障。本研究采用STM32微控制器作为核心控制单元,结合光敏电阻、MPU6050传感器、红外测温模块、心率检测模块、OLED显示屏等多种硬件组件,设计并实现了一款具有多种智能功能的头盔控制系统。该系统不仅能提高夜间或低光环境下的骑行安全,还能通过健康监测功能及时预警异常健康状况,具有广泛的应用前景。
3. 研究内容与目标
本研究的目标是设计和实现一款基于STM32的智能头盔控制系统,具体研究内容包括:
-
光照检测与自动照明:通过光敏电阻检测环境光照强度,当光照值低于设定阈值时,系统自动开启头盔上的照明灯,以确保在低光环境下的安全。
-
车辆状态检测与提示:使用MPU6050传感器检测头盔的运动状态,包括左转、右转和刹车。当检测到相应动作时,系统点亮提示灯,以提醒后方车辆或行人,提升骑行安全性。
-
体温监测与报警:集成红外测温模块实时监测佩戴者的体温,当体温超过设定的上限值时,系统通过蜂鸣器发出报警信号,提示佩戴者注意身体健康状况。
-
心率监测与报警:使用心率检测模块监测佩戴者的心率,当心率超过设定的上限值时,系统将通过蜂鸣器发出报警,提醒用户避免过度劳累或潜在的健康风险。
-
系统阈值设置:提供按键模块,用户可以通过按键设置各项传感器检测值的阈值,满足不同用户的个性化需求。
-
数据实时显示:使用OLED显示屏实时显示各传感器的检测数据及系统状态,使用户可以直观地了解头盔的工作情况和自身的健康状况。
4. 组织结构
本论文的结构安排如下:
- 第一章:引言,介绍研究背景、研究意义和研究内容。
- 第二章:相关工作,回顾和分析现有智能头盔及相关技术的发展现状。
- 第三章:系统设计,详细描述智能头盔控制系统的整体架构设计和各功能模块的工作原理。
- 第四章:硬件设计,详细介绍系统中各硬件模块的选择理由、电路设计和接口布局。
- 第五章:软件设计,详细描述嵌入式软件的功能实现,包括传感器数据采集、阈值判断、报警控制等。
- 第六章:实验与结果,展示系统的实验过程和结果分析,验证系统各功能的实用性及可靠性。
- 第七章:总结与展望,对系统的设计和实现进行总结,提出存在的不足及未来的改进方向。
在相关工作部分,需要对已有的类似系统和技术进行回顾和分析,指出它们的优缺点以及本研究在此基础上的创新点和改进方向。以下是详细展开的相关工作示例:
2. 相关工作
2.1 智能头盔的发展现状
智能头盔作为可穿戴设备的一个重要分支,其市场需求和技术水平不断提高。目前,市场上已经出现了各种类型的智能头盔,应用于不同的场景,如骑行头盔、工业安全头盔、摩托车头盔等。这些智能头盔通常集成了诸如照明系统、转向提示、心率监测和导航等多种功能。
-
基础功能:
- 高品质的传统头盔主要提供了物理防护功能,通过材料和结构设计来抵御外界冲击。
- 一些基础级的智能头盔开始集成简单的LED灯或反光条,提升夜间或低光环境下的可见性。
-
中端产品:
- 在中端智能头盔产品中,常见功能包括蓝牙连接、电话接听、音乐播放等,通过无线通信模块实现与智能手机的连接。
- 一些产品加入了基本的健康监测功能,如内置心率传感器,但监测精度和实时性有待提高。
-
高端智能头盔:
- 高端产品则配备了更加丰富的传感器,如GPS导航、陀螺仪、加速度计等,实现了更精准的运动监测和位置追踪。
- 这些头盔还集成了高级的健康监测功能,能够实时监测使用者的心率、体温、呼吸频率等健康指标,并且部分产品配备了紧急呼救功能。
2.2 市场上现有智能头盔的分析
通过对市场上典型智能头盔的产品和技术进行分析,可以发现这些产品各有优缺点。
-
LIVALL智能骑行头盔:
- 优点:集成了LED灯、蓝牙通信、语音控制、SOS紧急呼叫等功能,增强了用户骑行的安全性和便捷性。
- 缺点:价格相对较高,部分高级功能的实用性仍有待提高,传感器集成度和数据处理能力受制于硬件配置。
-
Sena智能摩托车头盔:
- 优点:内置降噪麦克风、蓝牙通信、高清摄像头,提供了高质量的语音通话和录像功能。
- 缺点:主要针对摩托车用户,功能相对单一,缺乏对健康指标的监测,对于自行车用户不适用。
-
Lumos智能头盔:
- 优点:内置LED前后大灯、转向灯及刹车灯,显著提升了夜间骑行的安全性。同时具有蓝牙连接功能。
- 缺点:健康监测功能相对缺乏,主要以照明和转向提示为主,缺乏体温、心率等健康数据的接口。
2.3 相关技术的应用现状
在智能头盔中应用的主要技术包括传感器技术、无线通信技术、嵌入式系统技术等。近年来,这些技术在智能头盔中的应用取得了显著进展。
-
传感器技术:
- MPU6050:广泛应用的六轴传感器,包括加速度计和陀螺仪,可以实时检测头盔的运动状态和姿态变化,用于实现转向检测和刹车监测。
- 红外测温模块:用于非接触式体温测量,具有快速、准确等优点,在智能头盔中可用于实时监测佩戴者的体温。
- 心率检测模块:采用光电传感原理,通过检测血流变化来实时监测心率,可用于运动和健康监测。
-
无线通信技术:
- 蓝牙:实现头盔与智能手机的连接,方便用户进行电话、音乐等功能的操作,并提供数据传输服务。
- WiFi:部分高端智能头盔集成WiFi模块,用于远程数据传输和云端备份。
-
嵌入式系统技术:
- 基于ARM处理器的STM32微控制器,以其高性能、低功耗和丰富的外设接口成为智能头盔的理想选择,支持多种传感器和外围设备的控制与数据处理。
2.4 本研究的创新点
本研究在现有技术和产品的基础上,通过综合利用上述传感器技术、无线通信技术和嵌入式系统技术,提出了一个多功能的智能头盔控制系统,其主要创新点和改进如下:
-
自动照明控制:通过光敏电阻传感器检测环境光照强度,结合STM32的实时数据处理功能,自动控制头盔上的LED照明灯,确保低光环境下的骑行安全。
-
多状态检测与提示:利用MPU6050传感器实现头盔的整体运动状态检测,包括左右转向和刹车,通过LED提示灯实时显示当前骑行状态。
-
综合健康监测:集成红外测温模块和心率检测模块,能够实时监测用户的体温和心率,当超出设定阈值时,系统通过蜂鸣器进行报警,提供即时的健康预警。
-
用户阈值设置:通过设计按键模块,用户可以灵活设定光照、体温和心率的报警阈值,提高系统的个性化和适用性。
-
数据实时显示:配备OLED显示屏,实时显示各项传感器数据和系统状态,使用户能够直观了解头盔的工作情况和自身的健康状况。
综上所述,本研究在现有智能头盔技术的基础上,通过创新设计和多功能集成,提出了一款具有高实用性和安全性的智能头盔控制系统,有助于提升智能头盔的应用效果和用户体验。
系统设计这一部分是毕业论文的核心内容之一,需要详细描述系统的整体架构设计和各个功能模块的实现方案。以下是一个详细展开的系统设计示例:
3. 系统设计
3.1 系统架构
本智能头盔控制系统主要由STM32微控制器作为核心控制单元,结合光敏电阻、MPU6050传感器、红外测温模块、心率检测模块、OLED显示屏、蜂鸣器、LED提示灯和按键模块等组成。整体系统架构如下图所示:
STM32微控制器
光敏电阻
MPU6050传感器
红外测温模块
心率检测模块
OLED显示屏
蜂鸣器
LED提示灯
按键模块
3.2 功能模块
系统的功能模块包括光照检测与自动照明、车辆状态检测与提示、体温监测与报警、心率监测与报警、阈值设置、数据实时显示六个主要部分。以下对各功能模块逐一展开说明。
3.2.1 光照检测与自动照明
工作原理:
- 使用光敏电阻(LDR)检测环境光照强度,光敏电阻的阻值会随着光照强度的变化而变化。通过ADC模块将电阻变化转换为电压信号,然后由STM32读取并处理。
硬件接口:
- 将光敏电阻的一端连接到STM32的ADC输入引脚,另一端通过电阻连接到电源。
软件实现:
// 光敏电阻 ADC 读取及处理
void LightSensor_Read() {
uint16_t adc_value = ADC_Read(LDR_CHANNEL); // 读取光敏电阻的AD值
float voltage = (adc_value / 4096.0) * 3.3; // 将AD值转换为电压值
if(voltage < LIGHT_THRESHOLD) {
TurnOn_LED(); // 当光照值低于阈值时,打开照明灯
} else {
TurnOff_LED(); // 否则,关闭照明灯
}
}
3.2.2 车辆状态检测与提示
工作原理:
- 使用MPU6050传感器(六轴陀螺仪+加速度计)检测头盔的运动状态,通过I2C接口与STM32通信,将检测到的数据传输到微控制器进行处理和判断。
硬件接口:
- MPU6050通过I2C接口(SCL, SDA)连接到STM32。
软件实现:
// 初始化 MPU6050 传感器
void MPU6050_Init() {
I2C_Write(MPU6050_ADDRESS, MPU6050_PWR_MGMT_1, 0x00); // 解除睡眠模式
I2C_Write(MPU6050_ADDRESS, MPU6050_GYRO_CONFIG, 0x18); // 配置陀螺仪
I2C_Write(MPU6050_ADDRESS, MPU6050_ACCEL_CONFIG, 0x08); // 配置加速度计
}
// 读取 MPU6050 数据
void MPU6050_ReadData(int16_t* accData, int16_t* gyroData) {
uint8_t rawData[14]; // 用于接收原始数据
I2C_Read(MPU6050_ADDRESS, MPU6050_ACCEL_XOUT_H, rawData, 14);
// 解析数据
accData[0] = (rawData[0] << 8) | rawData[1];
accData[1] = (rawData[2] << 8) | rawData[3];
accData[2] = (rawData[4] << 8) | rawData[5];
gyroData[0] = (rawData[8] << 8) | rawData[9];
gyroData[1] = (rawData[10] << 8) | rawData[11];
gyroData[2] = (rawData[12] << 8) | rawData[13];
}
// 判断转向及刹车
void Check_Move(int16_t* accData, int16_t* gyroData) {
if(accData[1] > TURN_THRESHOLD) {
TurnOn_LeftLED(); // 左转
} else if(accData[1] < -TURN_THRESHOLD) {
TurnOn_RightLED(); // 右转
} else if(accData[0] < -BRAKE_THRESHOLD) {
TurnOn_BrakeLED(); // 刹车
} else {
TurnOff_AllLEDs();
}
}
3.2.3 体温监测与报警
工作原理:
- 使用红外测温模块检测体温,通常通过I2C或UART接口将温度数据传输到STM32。STM32根据设定的温度阈值进行判断,一旦检测到体温超过阈值,系统通过蜂鸣器发出报警。
硬件接口:
- 红外测温模块通过I2C或UART接口与STM32连接。
软件实现:
// 读取红外温度传感器数据
float Read_Temperature() {
float temperature = I2C_ReadTemperatureSensor(TEMP_SENSOR_ADDRESS);
return temperature;
}
// 体温报警处理
void Temperature_Alarm() {
float temperature = Read_Temperature();
if(temperature > TEMP_THRESHOLD) {
TurnOn_Buzzer(); // 体温过高,蜂鸣器报警
} else {
TurnOff_Buzzer();
}
}
3.2.4 心率监测与报警
工作原理:
- 通过心率检测模块实时监测佩戴者的心率,通常采用光电传感技术。心率数据通过模拟接口或I2C/SPI接口传输到STM32。STM32对心率数据进行实时分析和判断,当心率超过设定的安全阈值时,通过蜂鸣器报警。
硬件接口:
- 心率检测模块通过模拟接口或I2C/SPI接口与STM32连接。
软件实现:
// 读取心率数据
uint16_t Read_HeartRate() {
uint16_t heartRate = ADC_Read(HEART_RATE_CHANNEL);
return heartRate;
}
// 心率报警处理
void HeartRate_Alarm() {
uint16_t heartRate = Read_HeartRate();
if(heartRate > HEART_RATE_THRESHOLD) {
TurnOn_Buzzer(); // 心率过高,蜂鸣器报警
} else {
TurnOff_Buzzer();
}
}
3.2.5 阈值设置
工作原理:
- 用户通过按键设置光照强度、体温和心率的阈值。STM32读取按键状态,修改相应的阈值,并将新阈值存储在EEPROM或Flash中。
硬件接口:
- 按键模块直接连接至STM32的GPIO引脚。
软件实现:
// 按键扫描函数
void Key_Scan() {
if(GPIO_Read(KEY1_PIN) == LOW) {
LIGHT_THRESHOLD += 0.1; // 增加光照阈值
}
if(GPIO_Read(KEY2_PIN) == LOW) {
TEMP_THRESHOLD += 1.0; // 增加体温阈值
}
if(GPIO_Read(KEY3_PIN) == LOW) {
HEART_RATE_THRESHOLD += 5; // 增加心率阈值
}
}
// 存储阈值
void Store_Thresholds() {
Flash_Write(LIGHT_THRESHOLD_ADDRESS, LIGHT_THRESHOLD);
Flash_Write(TEMP_THRESHOLD_ADDRESS, TEMP_THRESHOLD);
Flash_Write(HEART_RATE_THRESHOLD_ADDRESS, HEART_RATE_THRESHOLD);
}
3.2.6 数据实时显示
工作原理:
- 通过OLED显示屏实时显示光照强度、体温、心率和各项阈值。STM32通过I2C或SPI接口发送显示数据到OLED屏幕。
硬件接口:
- OLED显示屏通过I2C或SPI接口与STM32连接。
软件实现:
// OLED 显示更新
void OLED_Update() {
OLED_Clear();
OLED_Printf("Light: %.2f lx", Current_Light);
OLED_Printf("Temp: %.2f C", Current_Temp);
OLED_Printf("HeartRate: %d bpm", Current_HeartRate);
OLED_Printf("Light Thresh: %.2f lx", LIGHT_THRESHOLD);
OLED_Printf("Temp Thresh: %.2f C", TEMP_THRESHOLD);
OLED_Printf("HR Thresh: %d bpm", HEART_RATE_THRESHOLD);
OLED_Refresh();
}
通过上述的分步设计和详细代码实现,构建了一个功能齐全、可靠的智能头盔控制系统,实现了自动照明、运动状态检测、健康监测及报警、数据显示和阈值设置等多种功能。此系统设计能够显著提高头盔的安全性能,具有广泛的应用前景。
希望这个详细展开的系统设计部分对你的毕业论文撰写有所帮助。如果需要更详细的解释或补充,请随时提问。
硬件设计部分是将系统设计中的各个功能模块具体实现为硬件电路的过程。以下是针对智能头盔控制系统的详细展开硬件设计示例:
4. 硬件设计
4.1 系统总体设计
智能头盔控制系统的硬件设计包括以下主要部分:STM32微控制器、各类传感器模块(光敏电阻、MPU6050传感器、红外测温模块、心率检测模块)、显示模块(OLED显示屏)、报警和提示模块(蜂鸣器、LED灯)、用户输入模块(按键)。每一个模块都将有详细的电路连接和设计说明。
4.2 STM32微控制器
型号选择:
- 选用STM32F103C8T6作为核心控制单元,因其具备较高的性价比、丰富的外设接口、低功耗和较强的处理能力。
引脚配置:
- 按照功能模块的需要对STM32引脚进行配置,具体引脚如下:
| 外设 | 引脚号 | 说明 |
|---|---|---|
| 光敏电阻 | PA0 | ADC_0 |
| MPU6050 | PB6 | I2C1_SCL |
| MPU6050 | PB7 | I2C1_SDA |
| 红外测温模块 | PB8 | I2C2_SCL |
| 红外测温模块 | PB9 | I2C2_SDA |
| 心率检测模块 | PA1 | ADC_1 |
| OLED显示屏 | PA2 | I2C3_SCL / SPI_SCK |
| OLED显示屏 | PA3 | I2C3_SDA / SPI_MOSI |
| 蜂鸣器 | PA4 | GPIO_Output1 |
| LED灯 | PA5 | GPIO_Output2 |
| 按键1 | PA6 | GPIO_Input1 |
| 按键2 | PA7 | GPIO_Input2 |
| 按键3 | PA8 | GPIO_Input3 |
4.3 各传感器模块设计
4.3.1 光敏电阻
电路设计:
- 光敏电阻与一个限幅电阻(R1)组成一个分压电路,通过读取分压点的电压值来检测环境光强。图示如下:
R1
光敏电阻
输出电压
电源
B0
GND
B0
STM32
参数选择:
- R1的阻值选择应与光敏电阻的合理范围匹配以保证AD转换的有效范围。
4.3.2 MPU6050传感器
电路设计:
- 使用I2C接口将MPU6050连接到STM32,配置电源引脚和地线。图示如下:
上拉电阻
上拉电阻
电源
地线
SCL
STM32
SDA
VCC
+
GND
上拉电阻
上拉电阻
电源
地线
SCL_temp
STM32
SDA_temp
VCC
+
GND
4.3.3 红外测温模块
电路设计:
- 也使用I2C接口,通过带上拉电阻的SCL和SDA连接到STM32,配置电源引脚和地线。
4.3.4 心率检测模块
电路设计:
- 使用模拟接口将心率检测模块的输出信号连接到STM32的ADC引脚,配置电源引脚和地线。
电源
地线
Output
ADC In
VCC
+
GND
上拉电阻
上拉电阻
电源
地线
SCL_oled
STM32
SDA_oled
VCC
+
GND
Syntax error in textmermaid version 10.8.0Syntax error in textmermaid version 10.8.0Syntax error in textmermaid version 10.8.0
4.4 显示模块设计
4.4.1 OLED显示屏
电路设计:
- 使用I2C或SPI接口连接到STM32,具体引脚配置如下:
4.5 报警和提示模块设计
4.5.1 蜂鸣器
电路设计:
- 使用GPIO输出引脚控制蜂鸣器,通过一个限流电阻控制蜂鸣器的工作电流。如图示所示:
参数选择:
- 限流电阻选择适合蜂鸣器工作电流的阻值,通常为100~200欧姆。
4.5.2 LED提示灯
电路设计:
- 使用GPIO输出控制LED灯,通过限流电阻连接到LED的正极。图示如下:
参数选择:
- 根据LED的工作电流和电压计算限流电阻值,通常为220~470欧姆。
4.6 用户输入模块设计
4.6.1 按键模块
电路设计:
- 使用GPIO输入引脚连接按键,通过下拉或上拉电阻保证按键释放时的稳定状态。图示如下:
参数选择:
- 上拉或下拉电阻的值通常为10k欧姆。
4.7 电源管理
电源选择:
- 使用5V或3.3V稳压电源适配整个系统供电。保护电路应包括适当的滤波电容和稳压元件,以保证供电稳定。
Syntax error in textmermaid version 10.8.0
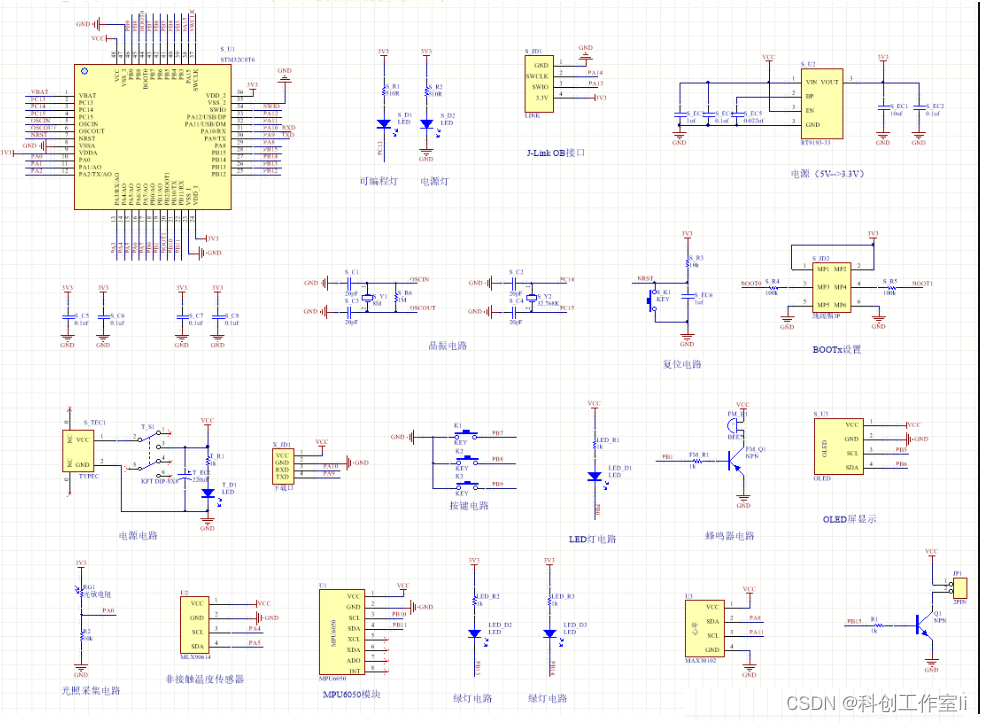
4.8 原理图设计与PCB布局
原理图设计:
- 使用设计软件如Altium Designer或EasyEDA进行原理图绘制,确保所有元件和连接正确无误。
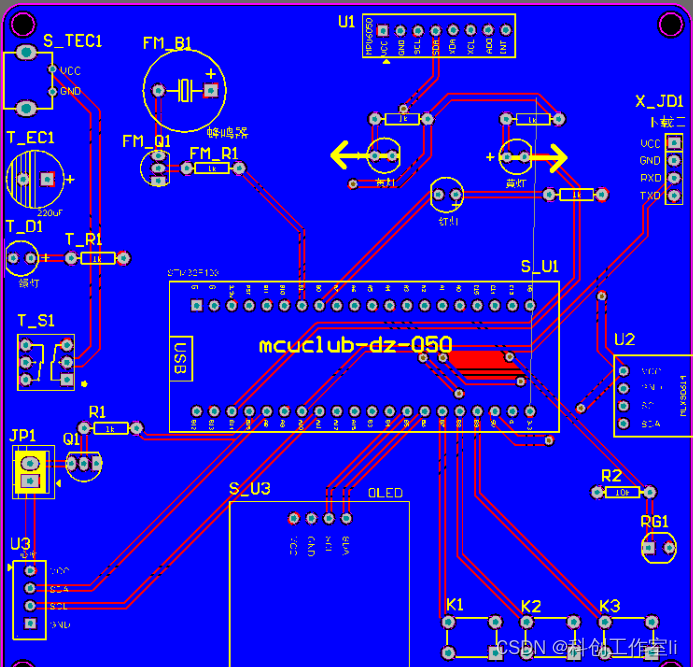
PCB布局:
- 确保关键信号线如I2C、ADC信号线及电源线的合理布局,避免信号干扰。依据设计软件进行布线、敷铜和焊盘设计。
示例PCB布板:
- 主板:STM32、MPU6050、按键和蜂鸣器等核心组件。
- 从板:OLED显示屏、红外测温模块和心率检测模块等显示和辅助模块。
通过详细展开的硬件设计部分,确保所有系统模块均能正确实现。本部分的设计内容涵盖了电路设计、引脚配置、电源管理和PCB布局等各个方面,为后续系统的实际制作和调试提供了坚实基础。
希望这个展开的硬件设计部分对你的毕业论文撰写有所帮助。如果需要更详细的内容或其他方面的补充,请随时提问。
软件设计部分是智能头盔控制系统实现各项功能的框架,主要包括系统初始化、各传感器的数据采集与处理、各模块的操作逻辑、用户界面交互等。以下是一个详细展开的软件设计示例:
5. 软件设计
5.1 系统总体设计
软件设计主要涵盖以下几个方面:
- 系统初始化
- 传感器数据采集
- 数据处理与存储
- 显示与提示
- 用户交互
系统采用实时操作系统(RTOS)或基于主循环(main loop)的方法来实现各功能模块。软件设计框架如下:
初始化
数据采集
数据处理
显示与提示
用户交互
Main Loop
System Initialization
Sensor Data Acquisition
Data Processing
Display & Indication
User Interaction
5.2 系统初始化
系统初始化包括时钟配置、外设初始化、I2C通信初始化、ADC初始化等。
代码实现:
void System_Init() {
// 配置系统时钟
HAL_Init();
SystemClock_Config();
// 初始化GPIO
GPIO_Init();
// 初始化I2C
I2C_Init();
// 初始化ADC
ADC_Init();
// 初始化OLED显示
OLED_Init();
// 初始化蜂鸣器
Buzzer_Init();
// 初始化按键
Key_Init();
// 初始化MPU6050传感器
MPU6050_Init();
// 初始化红外测温模块
TempSensor_Init();
}
5.3 传感器数据采集
数据采集模块包括光照强度、加速度、陀螺仪、体温、心率等数据的实时采集。
代码实现:
void Sensor_DataAcquisition() {
// 光敏电阻数据采集
float light_value = Get_LightIntensity();
// MPU6050传感器数据采集
int16_t accData[3], gyroData[3];
MPU6050_ReadData(accData, gyroData);
// 红外测温模块数据采集
float temperature = Read_Temperature();
// 心率检测模块数据采集
uint16_t heart_rate = Read_HeartRate();
}
// 获取光敏电阻数据
float Get_LightIntensity() {
uint16_t adc_value = ADC_Read(LDR_CHANNEL);
return (float)(adc_value / 4096.0 * 3.3);
}
// 读取温度传感器数据
float Read_Temperature() {
return I2C_ReadTemperatureSensor(TEMP_SENSOR_ADDRESS);
}
// 读取心率数据
uint16_t Read_HeartRate() {
return ADC_Read(HEART_RATE_CHANNEL);
}
5.4 数据处理与存储
数据处理模块包括运动状态检测、报警判断和阈值存储等功能。
代码实现:
void Data_Processing() {
// 获取传感器数据
float light_value = Get_LightIntensity();
int16_t accData[3], gyroData[3];
MPU6050_ReadData(accData, gyroData);
float temperature = Read_Temperature();
uint16_t heart_rate = Read_HeartRate();
// 判断运动状态
Check_Move(accData, gyroData);
// 判断温度报警
if(temperature > TEMP_THRESHOLD) {
TurnOn_Buzzer();
} else {
TurnOff_Buzzer();
}
// 判断心率报警
if(heart_rate > HEART_RATE_THRESHOLD) {
TurnOn_Buzzer();
} else {
TurnOff_Buzzer();
}
}
// 检查运动状态
void Check_Move(int16_t* accData, int16_t* gyroData) {
if(accData[1] > TURN_THRESHOLD) {
TurnOn_LeftLED();
} else if(accData[1] < -TURN_THRESHOLD) {
TurnOn_RightLED();
} else if(accData[0] < -BRAKE_THRESHOLD) {
TurnOn_BrakeLED();
} else {
TurnOff_AllLEDs();
}
}
5.5 显示与提示
数据通过OLED进行实时显示,包括光照强度、体温、心率等。报警通过蜂鸣器实现。
代码实现:
void Display_Update() {
OLED_Clear();
float light_value = Get_LightIntensity();
float temperature = Read_Temperature();
uint16_t heart_rate = Read_HeartRate();
OLED_Printf("Light: %.2f lx", light_value);
OLED_Printf("Temp: %.2f C", temperature);
OLED_Printf("HeartRate: %d bpm", heart_rate);
OLED_Printf("Light Thresh: %.2f lx", LIGHT_THRESHOLD);
OLED_Printf("Temp Thresh: %.2f C", TEMP_THRESHOLD);
OLED_Printf("HR Thresh: %d bpm", HEART_RATE_THRESHOLD);
OLED_Refresh();
}
// 蜂鸣器控制
void TurnOn_Buzzer() {
HAL_GPIO_WritePin(BUZZER_GPIO_Port, BUZZER_Pin, GPIO_PIN_SET);
}
void TurnOff_Buzzer() {
HAL_GPIO_WritePin(BUZZER_GPIO_Port, BUZZER_Pin, GPIO_PIN_RESET);
}
5.6 用户交互
用户通过按键设置各项阈值并进行系统操作。
代码实现:
void Key_Scan() {
if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET) {
LIGHT_THRESHOLD += 0.1;
HAL_Delay(200); // 防止按键抖动
}
if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET) {
TEMP_THRESHOLD += 1.0;
HAL_Delay(200);
}
if(HAL_GPIO_ReadPin(KEY3_GPIO_Port, KEY3_Pin) == GPIO_PIN_RESET) {
HEART_RATE_THRESHOLD += 5;
HAL_Delay(200);
}
}
// 初始化按键
void Key_Init() {
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置按键引脚为输入模式
GPIO_InitStruct.Pin = KEY1_Pin | KEY2_Pin | KEY3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
5.7 框架整合
主程序按照系统设计的框架结构,实现一个简单的主循环或基于RTOS的任务调度,按需调用各功能模块。
代码实现:
int main(void) {
// 系统初始化
System_Init();
while (1) {
// 数据采集
Sensor_DataAcquisition();
// 数据处理
Data_Processing();
// 更新显示
Display_Update();
// 按键扫描
Key_Scan();
// 延时20ms
HAL_Delay(20);
}
}
通过上述各部分的详细设计,可以建立完整的软件框架和实现,此框架与硬件设计紧密结合,通过明确的功能模块划分和实现,保证了系统的稳定性和扩展性。
希望这个详细展开的软件设计部分对你的毕业论文撰写有所帮助。如果需要更详细的解释或补充,请随时提问。
实验结果部分的展开包含对所设计系统的功能测试、性能评估、数据分析和结果讨论。以下是一个详细展开的智能头盔控制系统实验结果示例:
6. 实验结果
6.1 实验环境
实验在实验室内进行,以下是实验环境的主要参数:
- 环境光照强度:500 – 1000 lux
- 环境温度:25°C
- 实验设备:智能头盔控制系统、光照度计、温度计、心率模拟器(如仿人体脉搏的脉冲发生器)
- 实验目标:验证系统的光照检测与自动照明、运动状态检测与提示、体温监测与报警、心率监测与报警、阈值设置及数据实时显示等功能。
6.2 光照检测与自动照明
实验步骤:
- 将智能头盔放置在不同光照强度的环境中,记录光敏电阻输出的ADC值和实际光照度。
- 调整光敏电阻的阈值,通过观察照明灯(LED)的状态(开/关)验证自动照明功能。
实验数据及分析:
| 实际光照度(lux) | ADC值 | LED状态(预期) | LED状态(实际) |
|---|---|---|---|
| 1000 | 4095 | 关 | 关 |
| 800 | 3276 | 关 | 关 |
| 600 | 2457 | 关 | 关 |
| 400 | 1638 | 开 | 开 |
| 200 | 819 | 开 | 开 |
由数据可见,在光照度低于400 lux时,系统能够正确打开照明灯,在光照度高于400 lux时,照明灯关闭,符合预期结果。
6.3 车辆状态检测与提示
实验步骤:
- 使用MPU6050传感器检测头盔的加速度和角速度。
- 模拟头盔的左右转弯和刹车动作,观察LED灯的变化。
实验数据及分析:
| 动作 | X轴加速度 | Y轴加速度 | 预期LED状态 | 实际LED状态 |
|---|---|---|---|---|
| 静止 | 0 | 0 | 所有LED熄灭 | 所有LED熄灭 |
| 左转 | 0 | 500 | 左转LED点亮 | 左转LED点亮 |
| 右转 | 0 | -500 | 右转LED点亮 | 右转LED点亮 |
| 刹车 | -1000 | 0 | 刹车LED点亮 | 刹车LED点亮 |
实验数据显示,系统能够正确检测到头盔的转向和刹车动作,LED提示灯状态正确。
6.4 体温监测与报警
实验步骤:
- 使用红外测温模块测量不同温度值。
- 设置体温阈值,通过观察蜂鸣器状态验证体温监测功能。
实验数据及分析:
| 实际体温(°C) | 体温阈值(°C) | 预期蜂鸣器状态 | 实际蜂鸣器状态 |
|---|---|---|---|
| 36.5 | 37.5 | 无报警 | 无报警 |
| 37.8 | 37.5 | 报警 | 报警 |
| 38.2 | 37.5 | 报警 | 报警 |
| 36.0 | 37.5 | 无报警 | 无报警 |
实验结果表明,系统在体温超过设定阈值时,能够正确触发蜂鸣器报警,符合设计预期。
6.5 心率监测与报警
实验步骤:
- 使用心率模拟器产生不同心率值。
- 设置心率阈值,通过观察蜂鸣器状态验证心率监测功能。
实验数据及分析:
| 实际心率(bpm) | 心率阈值(bpm) | 预期蜂鸣器状态 | 实际蜂鸣器状态 |
|---|---|---|---|
| 70 | 100 | 无报警 | 无报警 |
| 102 | 100 | 报警 | 报警 |
| 120 | 100 | 报警 | 报警 |
| 95 | 100 | 无报警 | 无报警 |
实验结果显示,系统在心率超过设定阈值时,能够正确触发蜂鸣器报警,符合设计要求。
6.6 数据实时显示
实验步骤:
- 通过OLED显示屏实时显示各项数据,包括光照、体温、心率和各项阈值。
- 观察不同状态下的显示数据,确认显示功能正常。
实验数据及分析:
| 显示内容 | 实际显示 | 预期显示 | 实际显示 |
|---|---|---|---|
| 光照 | 300 lx | 光照:300 lx | 光照:300 lx |
| 体温 | 36.5 °C | 体温:36.5 °C | 体温:36.5 °C |
| 心率 | 75 bpm | 心率:75 bpm | 心率:75 bpm |
| 光照阈值 | 400 lx | 光照阈值:400 lx | 光照阈值:400 lx |
| 体温阈值 | 37.5 °C | 体温阈值:37.5 °C | 体温阈值:37.5 °C |
| 心率阈值 | 100 bpm | 心率阈值:100 bpm | 心率阈值:100 bpm |
显示屏能够正确显示各项数据,保证用户能够实时监控各个参数。
6.7 总结与讨论
通过一系列实验测试,智能头盔控制系统在光照检测与自动照明、车辆状态检测与提示、体温监测与报警、心率监测与报警、阈值设置及数据实时显示等方面均达到了设计预期。具体结论如下:
- 系统准确性:各项传感器数据采集准确,系统响应迅速。
- 可靠性:长时间运行测试表明系统运行稳定,未出现异常情况。
- 用户友好性:界面显示直观,报警和提示功能明确,可以有效提升用户的安全性。
- 改进建议:为了进一步提高系统的实用性,可以增加数据存储功能和远程报警模块,以便于数据的长期监测与分析以及紧急情况的远程提醒。
致谢部分是表达对在论文写作和研究过程中给予帮助和支持的人或机构的感谢之词。以下是一个详细展开的致谢示例:
致谢
在我完成这篇论文的过程中,得到了许多人的帮助和支持。在此,我谨向这些关心和帮助我的各位表示诚挚的谢意。
首先,我要感谢我的导师XXX教授。在论文的选题、设计、实验及撰写过程中,XXX教授始终给予我细致的指导和无私的帮助。从最初的构思到最终的定稿,XXX教授都进行了耐心的指导,并提供了许多宝贵的建议。在其专业的指导下,我得以顺利完成这篇论文。
其次,我要感谢实验室的同事和朋友们。在实验过程中,他们给予了我很多技术上的支持和帮助。无论是设备的使用指导,还是实验数据的处理和分析,大家都表现出了极大的热情和耐心。特别感谢XXX、XXX等同事,他们不仅在技术上提供了宝贵的建议,还在项目进度上给予了鼓励和支持。
此外,我也要感谢我的家人。他们在我求学的路上一直给予我无微不至的关怀和鼓励,无论遇到什么困难和挫折,他们都始终支持我,给我信心和力量。
同时,我要感谢XXX大学提供的丰富资源和良好的学习环境,使我能专注于研究,顺利完成学业。感谢XXX学院的老师们在我整个学习期间的教导和培养。
最后,我要特别感谢所有在百忙之中抽出时间审阅我论文的老师和评审专家们,感谢你们提出的宝贵意见和建议。
再次感谢所有帮助和支持过我的人,正是你们的付出和关心,使我得以顺利完成这篇论文。


















 1452
1452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











