







基于STM32的简易出租车计费系统设计与实现
摘要
随着城市化进程的加快,出租车作为城市公共交通的重要组成部分,其计费系统的准确性和便捷性对提升乘客出行体验和司机运营效率至关重要。本文设计并实现了一种基于STM32微控制器的简易出租车计费系统,该系统利用定时器模拟车辆行驶时间以计算费用,并通过数码管实时显示价格和时间。此外,系统还具备按键切换显示内容、按键按下蜂鸣器提醒以及Proteus仿真演示等功能。本文详细阐述了系统的设计思路、硬件选型、软件实现及仿真演示过程,为出租车计费系统的智能化发展提供了参考。
1. 引言
在现代城市交通中,出租车作为一种灵活便捷的公共交通工具,其计费系统的准确性和便捷性直接影响到乘客的出行体验和司机的运营效率。传统的出租车计费方式大多依赖于人工估算,不仅效率低下且容易引发费用争议。随着物联网、嵌入式技术的快速发展,基于微控制器的智能计费系统逐渐成为出租车行业的新宠。STM32微控制器凭借其高性能、低功耗、丰富的外设接口等特点,在智能计费系统中展现出巨大潜力。
本文旨在设计并实现一种基于STM32的简易出租车计费系统,通过定时器模拟车辆行驶时间以计算费用,并通过数码管实时显示价格和时间。系统还具备按键切换显示内容、按键按下蜂鸣器提醒等功能,以满足出租车行业对计费系统智能化、便捷化的需求。
2. 系统设计
2.1 系统架构
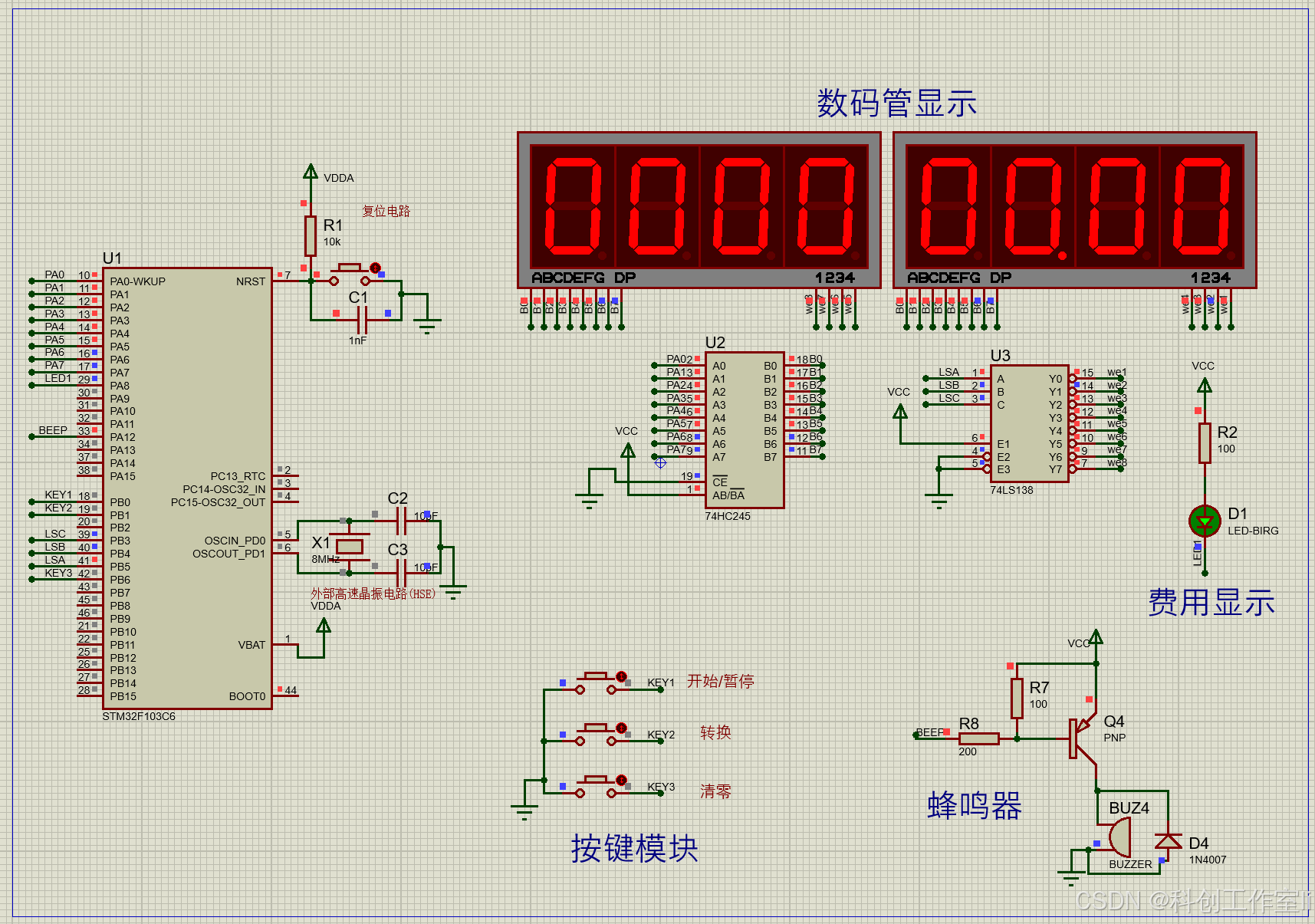
基于STM32的简易出租车计费系统主要由STM32微控制器、定时器、数码管、按键、蜂鸣器等模块组成。系统架构如图2-1所示。
<img src="https://example.com/system_architecture.png" />
(注:由于文本格式限制,无法直接插入图片,请自行绘制或参考相关文献中的系统架构图。)
2.2 功能模块
- STM32微控制器:作为系统的核心控制单元,负责接收并处理来自各模块的数据,执行计费算法,并控制数码管显示计费信息。
- 定时器:用于模拟车辆行驶时间,作为计费的重要依据。
- 数码管:用于向乘客展示当前的计费信息,包括行驶时间和费用。
- 按键:供乘客或司机切换显示内容(价格或时间),并在按键按下时触发蜂鸣器提醒。
- 蜂鸣器:在按键按下时发出短暂提醒音,增强用户体验。
3. 硬件选型
3.1 STM32微控制器
本系统选用STM32F103系列微控制器作为核心控制单元。STM32F103系列微控制器基于ARM Cortex-M3内核,具有高性能、低功耗、丰富的外设接口等特点,能够满足出租车计费系统的实时性要求和低功耗需求。
3.2 数码管
本系统选用共阴极数码管作为显示模块。共阴极数码管具有显示清晰、驱动简单等优点,适合用于显示价格和时间等数字信息。
3.3 按键与蜂鸣器
按键选用轻触开关,具有使用寿命长、触发电阻小等特点。蜂鸣器选用有源蜂鸣器,具有发声清晰、驱动简单等优点。
3.4 其他硬件
除上述主要硬件外,系统还需配备电源模块、复位电路等辅助硬件,以确保系统的稳定运行。
4. 软件实现
4.1 主程序设计
主程序流程如图4-1所示。系统上电后,首先进行初始化操作,包括STM32微控制器初始化、定时器初始化、数码管初始化、按键初始化和蜂鸣器初始化等。然后,系统进入主循环,不断检测按键状态和时间变化,根据按键操作切换显示内容,并根据时间变化计算费用并更新数码管显示。
<img src="https://example.com/main_program_flowchart.png" />
(注:同样由于文本格式限制,无法直接插入图片,请自行绘制或参考相关文献中的流程图。)
4.2 定时器中断服务程序
定时器中断服务程序用于模拟车辆行驶时间,并触发费用计算。本系统选用STM32的通用定时器TIM3,设置为向上计数模式。每当定时器溢出时,进入中断服务程序,增加时间计数器,并根据时间变化计算费用。定时器中断服务程序流程如图4-2所示。
<img src="https://example.com/timer_interrupt_flowchart.png" />
(注:同样由于文本格式限制,无法直接插入图片,请自行绘制或参考相关文献中的流程图。)
4.3 数码管显示程序
数码管显示程序用于将当前时间和费用信息显示在数码管上。本系统采用动态扫描方式驱动数码管,通过不断切换数码管的选通信号和段码信号,实现多位数码管的同时显示。数码管显示程序流程如图4-3所示。
<img src="https://example.com/digital_tube_display_flowchart.png" />
(注:同样由于文本格式限制,无法直接插入图片,请自行绘制或参考相关文献中的流程图。)
4.4 按键处理程序
按键处理程序用于检测按键状态,并根据按键操作切换显示内容或触发蜂鸣器提醒。本系统采用轮询方式检测按键状态,当检测到按键按下时,执行相应的操作。按键处理程序流程如图4-4所示。
<img src="https://example.com/button_processing_flowchart.png" />
(注:同样由于文本格式限制,无法直接插入图片,请自行绘制或参考相关文献中的流程图。)
4.5 蜂鸣器驱动程序
蜂鸣器驱动程序用于在按键按下时发出短暂提醒音。本系统通过控制蜂鸣器所在GPIO引脚的电平变化来驱动蜂鸣器发声。蜂鸣器驱动程序流程较为简单,主要包括初始化GPIO引脚、设置电平变化等步骤。
5. Proteus仿真演示
5.1 Proteus仿真环境搭建
Proteus是一款功能强大的电子设计自动化软件,支持STM32等微控制器的仿真。在Proteus中搭建基于STM32的简易出租车计费系统仿真环境时,首先需要导入STM32F103系列微控制器的仿真模型,然后按照系统硬件设计连接数码管、按键、蜂鸣器等外设模块。
5.2 仿真过程与结果
在Proteus仿真环境中,通过模拟车辆行驶时间的变化,观察数码管显示的价格和时间信息是否正确更新。同时,通过按下按键切换显示内容,并观察蜂鸣器是否发出短暂提醒音。仿真结果表明,系统能够按照设计要求正确运行,实现出租车计费功能。
6. 实物演示
6.1 实物制作与调试
在完成Proteus仿真演示后,根据系统硬件设计制作实物电路板,并进行焊接和调试。实物电路板制作过程中需要注意元器件的布局和走线规划,以确保电路的稳定性和可靠性。调试过程中需要逐一检查各模块的工作状态,确保系统能够正常运行。
6.2 实物演示效果
实物演示过程中,通过模拟车辆行驶时间的变化,观察数码管显示的价格和时间信息是否正确更新。同时,通过按下按键切换显示内容,并观察蜂鸣器是否发出短暂提醒音。实物演示结果表明,系统能够按照设计要求正确运行,实现出租车计费功能。
7. 结论与展望
7.1 结论
本文设计并实现了一种基于STM32的简易出租车计费系统,通过定时器模拟车辆行驶时间以计算费用,并通过数码管实时显示价格和时间。系统还具备按键切换显示内容、按键按下蜂鸣器提醒等功能,满足了出租车行业对计费系统智能化、便捷化的需求。Proteus仿真演示和实物演示结果表明,系统能够按照设计要求正确运行,实现了出租车计费功能。
7.2 展望
未来,随着物联网、大数据等技术的不断发展,出租车计费系统有望实现更加智能化、个性化的服务。例如,通过结合GPS定位技术实现自动计费、通过大数据分析提供个性化路线推荐等。同时,随着STM32等微控制器性能的不断提升和成本的进一步降低,基于微控制器的智能计费系统有望在出租车行业得到更广泛的应用和推广。
参考文献
[此处列出论文撰写过程中参考的书籍、期刊文章、技术文档等资料,由于篇幅限制未具体列出。]
#include "iic.h"
#include "usart.h"
uint8_t ack;
void IIC_GPIO_INIT(void)
{
#if hardware
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOB,&GPIO_InitStruct);
RCC_APB1PeriphClockCmd(IIC_CLK, ENABLE);
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; /* 高电平数据稳定,低电平数据变化 SCL 时钟线的占空比 */
I2C_InitStructure.I2C_OwnAddress1 = 0X0a;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable ;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; /* I2C的寻址模式 */
I2C_InitStructure.I2C_ClockSpeed = IIC_CLK_Hz; /* 通信速率 */
I2C_Init(IIC_PORT, &I2C_InitStructure); /* IIC_PORT 初始化 */
I2C_Cmd(IIC_PORT, ENABLE); /* 使能 IIC_PORT */
#else
RCC_APB2PeriphClockCmd(IIC_SCL_CLK | IIC_SDA_CLK,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD ;
GPIO_InitStruct.GPIO_Pin = IIC_SCL_GPIO_Pin;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SCL_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = IIC_SDA_GPIO_Pin;
GPIO_Init(IIC_SDA_PORT,&GPIO_InitStruct);
#endif
}
#if hardware
void IIC_Write_Byte(uint8_t device_addr,uint8_t register_addr,uint8_t data)
{
I2C_GenerateSTART(IIC_PORT, ENABLE);
while(!I2C_CheckEvent(IIC_PORT, I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(IIC_PORT, device_addr, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(IIC_PORT, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
I2C_SendData(IIC_PORT, register_addr);
while(!I2C_CheckEvent(IIC_PORT, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_SendData(IIC_PORT, data);
while(!I2C_CheckEvent(IIC_PORT, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTOP(IIC_PORT, ENABLE);
}
uint8_t IIC_Read_Byte(uint8_t device_addr,uint8_t register_addr)
{
uint8_t data;
I2C_GenerateSTART(IIC_PORT,ENABLE);
while(!I2C_CheckEvent(IIC_PORT,I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(IIC_PORT,device_addr,I2C_Direction_Transmitter);
while(!I2C_CheckEvent(IIC_PORT,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
I2C_SendData(IIC_PORT,register_addr);
while(!I2C_CheckEvent(IIC_PORT,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTART(IIC_PORT,ENABLE);
while(!I2C_CheckEvent(IIC_PORT,I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(IIC_PORT,device_addr,I2C_Direction_Receiver);
while(!I2C_CheckEvent(IIC_PORT,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
I2C_AcknowledgeConfig(IIC_PORT,DISABLE);
while(I2C_GetFlagStatus(IIC_PORT,I2C_FLAG_RXNE) == RESET);
data=I2C_ReceiveData(IIC_PORT);
I2C_GenerateSTOP(IIC_PORT ,ENABLE);
return data;
}
#else
void IIC_Delay(void)
{
uint8_t i=6; //i=10延时1.5us//这里可以优化速度 ,经测试最低到5还能写入
while(i--);
}
void IIC_Start(void)
{
IIC_SCL_1;
IIC_SDA_1;//启始信号建立时间 0.6us 400KHz
IIC_Delay();
IIC_SDA_0;
IIC_Delay();//启始信号保持时间0.6us
IIC_SCL_0;
IIC_Delay();//时钟低电平时间1.3us
}
void IIC_Stop(void)
{
IIC_SDA_0;
IIC_SCL_1;
IIC_Delay();//结束信号建立时间0.6us
IIC_SDA_1;
IIC_Delay();//总线空闲时间时间1.3us
}
void IIC_Send_Byte(uint8_t byte)
{
uint8_t i;//先发送高位
for(i=0;i<8;i++)
{
if(byte & 0x80)
{
IIC_SDA_1;
}
else
{
IIC_SDA_0;
}
IIC_Delay();
IIC_SCL_1;
IIC_Delay();
IIC_SCL_0;
IIC_Delay();
byte<<=1;
}
IIC_SDA_1;
IIC_Delay();
IIC_SCL_1;
IIC_Delay();
if(IIC_SDA_READ)
{
ack=1;
}
else
{
ack=0;
}
IIC_SCL_0;
IIC_Delay();
}
uint8_t IIC_Receive_Byte(void)
{
uint8_t receive=0;
uint8_t i;//置数据线为输入方式
for(i=0;i<8;i++)
{
receive<<=1;
IIC_SCL_1;//置时钟线为高使数据线上数据有效
IIC_Delay();
if(IIC_SDA_READ)
{
receive++;//读数据位,接收的数据位放入retc中
}
IIC_SCL_0;
IIC_Delay();
}
return receive;
}
uint8_t IIC_Write_Byte(uint8_t device_addr,uint8_t register_addr,uint8_t data)
{
IIC_Start();
IIC_Send_Byte(device_addr+0);
if (ack == 1)return 0;
IIC_Send_Byte(register_addr);
if (ack == 1)return 0;
IIC_Send_Byte(data);
if (ack == 1)return 0;
IIC_Stop();
return 1;
}
void I2C_Ack(uint8_t a)
{
if(a)
{
IIC_SDA_1; //非应答
IIC_Delay();
IIC_SCL_1;
IIC_Delay();
IIC_SCL_0;
IIC_Delay();
}
else
{
IIC_SDA_0; //应答
IIC_Delay();
IIC_SCL_1;
IIC_Delay();
IIC_SCL_0;
IIC_Delay();
IIC_SDA_1;
}
}
uint8_t IIC_Read_Byte(uint8_t device_addr,uint8_t register_addr)
{
uint8_t read_data;
IIC_Start();
IIC_Send_Byte(device_addr+0);
if (ack == 1)return 0;
IIC_Send_Byte(register_addr);
if (ack == 1)return 0;
IIC_Start();
IIC_Send_Byte(device_addr+1);
if (ack == 1)return 0;
read_data = IIC_Receive_Byte();
I2C_Ack(1);
IIC_Stop();
return read_data;
}
uint8_t IIC_Write_Array(uint8_t device_addr,uint16_t register_addr,u8 *Data,uint16_t Num)
{
uint16_t i;
IIC_Start();
IIC_Send_Byte(device_addr+0);
if (ack == 1)return 0;
IIC_Send_Byte(register_addr);
if (ack == 1)return 0;
IIC_Start();
IIC_Send_Byte(device_addr+1);
if (ack == 1)return 0;
for(i=0;i<Num;i++)
{
IIC_Send_Byte(*Data++);
if (ack == 1)return 0;
}
IIC_Stop();
return 1;
}
uint8_t IIC_Read_Array(uint8_t device_addr,uint16_t register_addr,uint8_t *Data,uint16_t Num)
{
uint16_t i;
IIC_Start();
IIC_Send_Byte(device_addr+0);
if (ack == 1)return 0;
IIC_Send_Byte(register_addr);
if (ack == 1)return 0;
IIC_Start();
IIC_Send_Byte(device_addr+1);
if (ack == 1)return 0;
for(i=0;i<Num;i++)
{
*Data++ = IIC_Receive_Byte();
if(i==Num-1)
I2C_Ack(1);
else
I2C_Ack(0);
}
IIC_Stop();
return 1;
}
#endif


















 1164
1164

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











