







学习:《机器人操作系统》作者:刘相权,张万杰 配合赵虚左的视频
学完赵虚左第 2 章 ROS通信机制,通信机制重中之重
第 2 章 ROS通信机制
在机器人上可能集成各种传感器(雷达、摄像头、GPS...)以及运动控制实现,为了解耦合,在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。ROS 中的基本通信机制主要有如下三种实现策略:
-
话题通信(发布订阅模式)
-
服务通信(请求响应模式)
-
参数服务器(参数共享模式)
2.1 话题通信
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。话题通信的应用场景也极其广泛,比如下面一个常见场景:
机器人在执行导航功能,使用的传感器是激光雷达,机器人会采集激光雷达感知到的信息并计算,然后生成运动控制信息驱动机器人底盘运动。
在上述场景中,就不止一次使用到了话题通信。
- 以激光雷达信息的采集处理为例,在 ROS 中有一个节点需要时时的发布当前雷达采集到的数据,导航模块中也有节点会订阅并解析雷达数据。
- 再以运动消息的发布为例,导航模块会根据传感器采集的数据时时的计算出运动控制信息并发布给底盘,底盘也可以有一个节点订阅运动信息并最终转换成控制电机的脉冲信号。
以此类推,像雷达、摄像头、GPS.... 等等一些传感器数据的采集,也都是使用了话题通信,换言之,话题通信适用于不断更新的数据传输相关的应用场景。
话题通信概念:以发布订阅的方式实现不同节点之间数据交互的通信模式。
作用:用于不断更新的、少逻辑处理的数据传输场景。
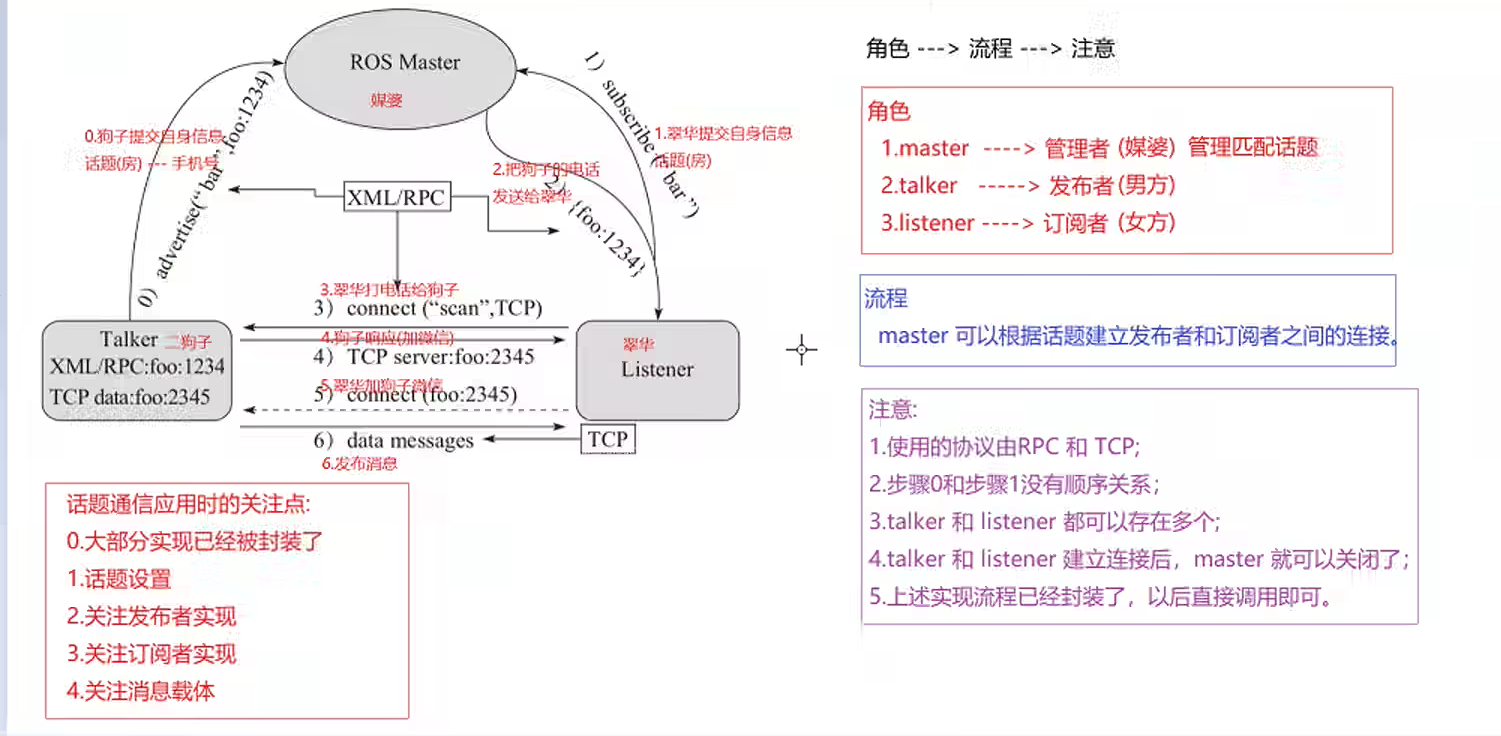
2.1.1 理论模型
2.1.2 话题通信基本操作
需求:
编写发布订阅实现,要求发布方以10HZ(每秒10次)的频率发布文本消息,订阅方订阅消息并将消息内容打印输出。
分析:
在模型实现中,ROS master 不需要实现(启动roscore即可实现),而连接的建立也已经被封装了,需要关注的关键点有三个:
- 发布方
- 接收方
- 数据(此处为普通文本)
流程:
- 编写发布方实现;
- 编写订阅方实现;
- 为python文件添加可执行权限;
- 编辑配置文件;
- 编译并执行。
1.发布方
#! /usr/bin/env python
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:HelloWorld 后缀数字编号
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 发布者 对象
4.组织被发布的数据,并编写逻辑发布数据
"""
#1.导包
import rospy
from std_msgs.msg import String
#ROS中用于导入字符串消息类型,为节点间通信提供标准化的文本数据传输接口。
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("talker_p")#发布节点的名称
#3.实例化 发布者 对象
pub = rospy.Publisher("chatter",String,queue_size=10)
#4.组织被发布的数据,并编写逻辑发布数据
msg = String() #创建 msg 对象
msg_front = "hello 你好"
count = 0 #计数器
# 设置循环频率
rate = rospy.Rate(1)
rospy.sleep(3)#发布在master那边注册需要时间
while not rospy.is_shutdown():
#拼接字符串
msg.data = msg_front + str(count)
pub.publish(msg)
rate.sleep()
rospy.loginfo("写出的数据:%s",msg.data)
count += 12.订阅方
#! /usr/bin/env python
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 订阅者 对象
4.处理订阅的消息(回调函数)
5.设置循环调用回调函数
"""
#1.导包
import rospy
from std_msgs.msg import String
def doMsg(msg):
rospy.loginfo("I heard:%s",msg.data)
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("listener_p")
#3.实例化 订阅者 对象
sub = rospy.Subscriber("chatter",String,doMsg,queue_size=10)
#4.处理订阅的消息(回调函数)
#5.设置循环调用回调函数
rospy.spin()3.添加可执行权限
终端下进入 scripts 执行:chmod +x *.py
4.配置 CMakeLists.txt
catkin_install_python(PROGRAMS
scripts/talker_p.py
scripts/listener_p.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)5.执行
1.启动 roscore;
2.启动发布节点;
3.启动订阅节点。
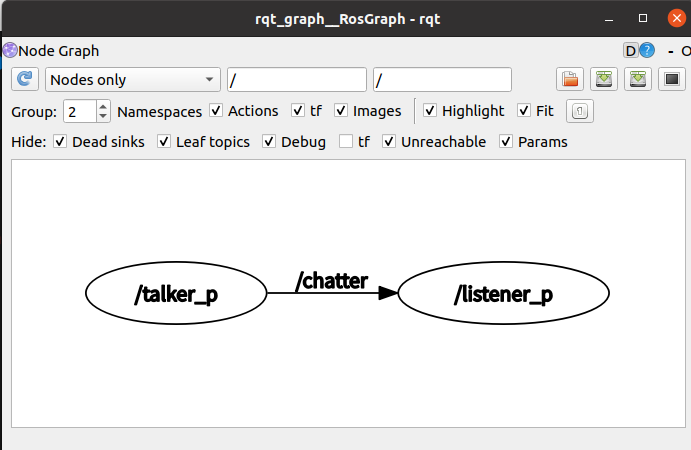
PS:可以使用 rqt_graph 查看节点关系。
2.1.3 话题通信自定义msg
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty.... 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息... std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
-
int8, int16, int32, int64 (或者无符号类型: uint*)
-
float32, float64
-
string
-
time, duration
-
other msg files
-
variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
需求:创建自定义消息,该消息包含人的信息:姓名、身高、年龄等。
流程:
- 按照固定格式创建 msg 文件
- 编辑配置文件
- 编译生成可以被 Python 或 C++ 调用的中间文件
1.定义msg文件
功能包下新建 msg 目录,添加文件 Person.msg
2.编辑配置文件
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!--
exce_depend 以前对应的是 run_depend 现在非法
-->CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs## 配置 msg 源文件
add_message_files(
FILES
Person.msg
)# 生成消息时依赖于 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)3.编译
编译后的中间文件查看:
Python 需要调用的中间文件(.../工作空间/devel/lib/python3/dist-packages/包名/msg)
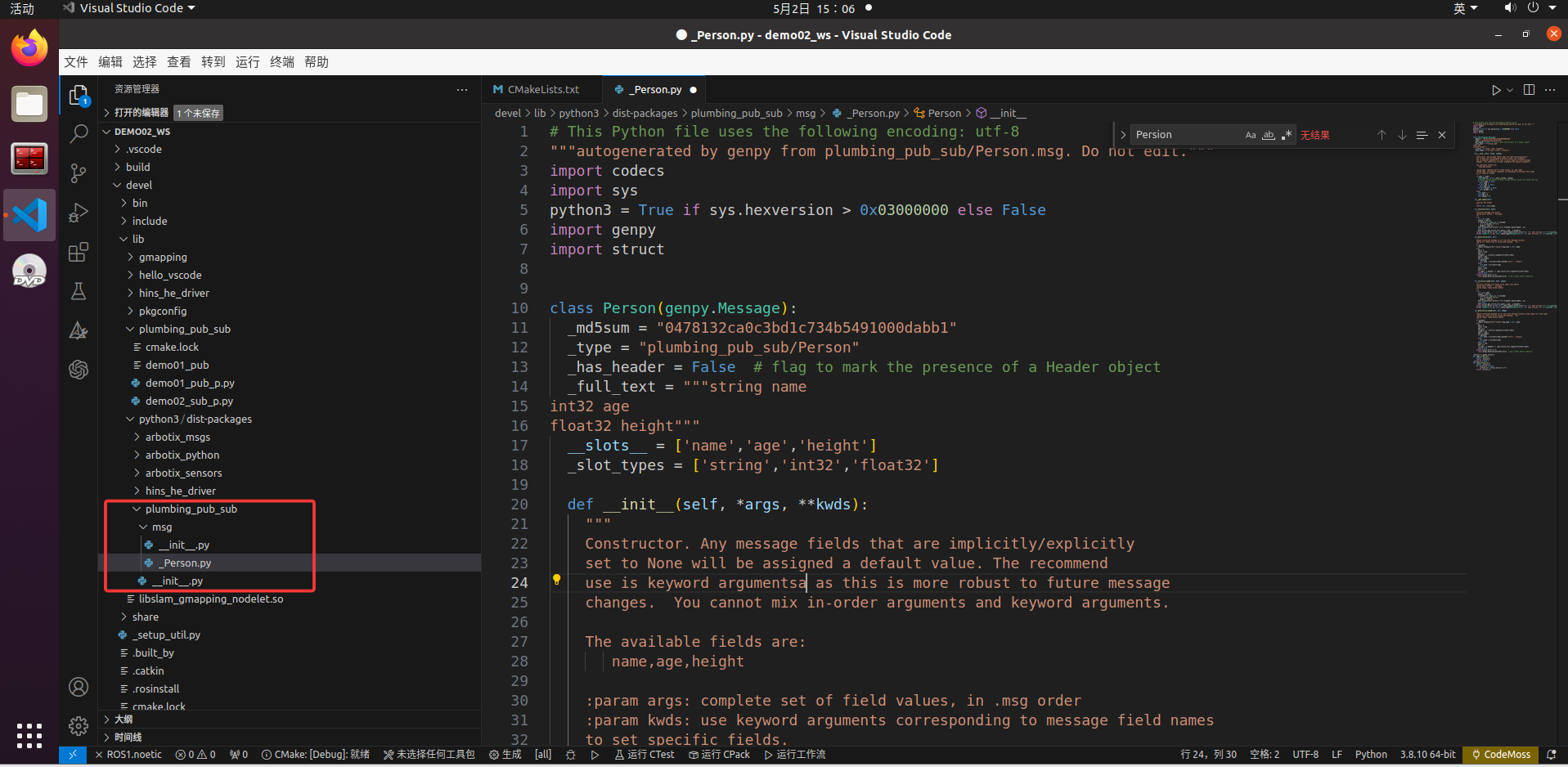
后续调用相关 msg 时,是从这些中间文件调用的
2.1.4 话题通信自定义msg调用
需求:
编写发布订阅实现,要求发布方以1HZ(每秒1次)的频率发布自定义消息,订阅方订阅自定义消息并将消息内容打印输出。
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
- 发布方
- 接收方
- 数据(此处为自定义消息)
流程:
- 编写发布方实现;
- 编写订阅方实现;
- 为python文件添加可执行权限;
- 编辑配置文件;
- 编译并执行。
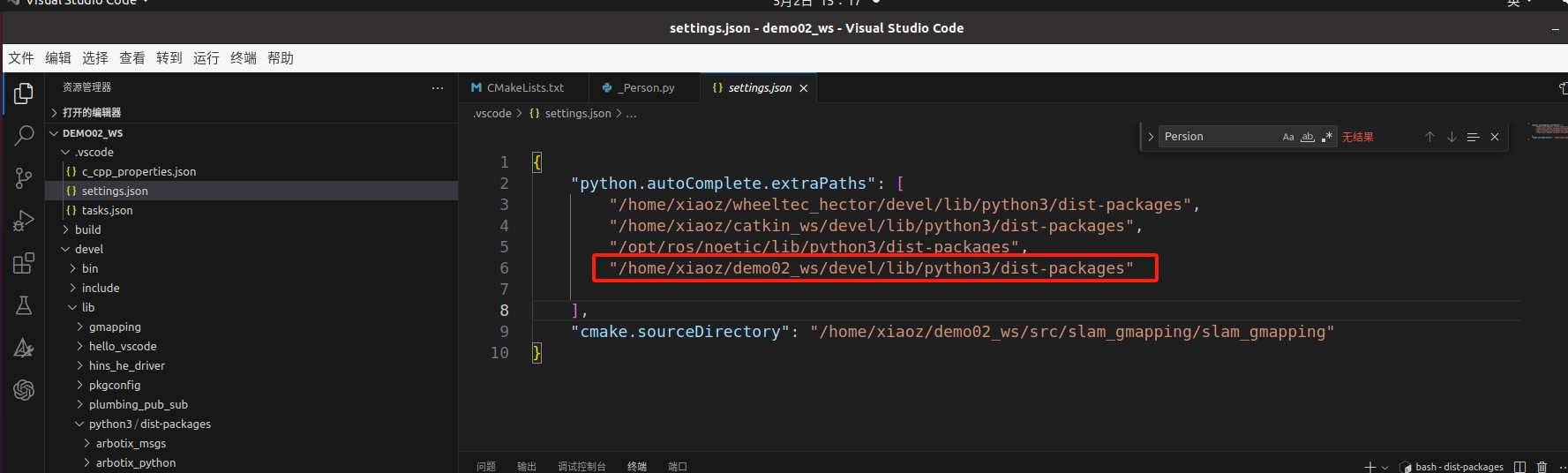
0.vscode配置
为了方便代码提示以及误抛异常,需要先配置 vscode,将前面生成的 python 文件路径配置进 settings.json
{
"python.autoComplete.extraPaths": [
"/opt/ros/noetic/lib/python3/dist-packages",
"/xxx/yyy工作空间/devel/lib/python3/dist-packages"
]
}
1.发布方
#! /usr/bin/env python
"""
发布方:
循环发送消息
"""
# 导包
import rospy
from plumbing_pub_sub.msg import Person
if __name__ == "__main__":
#1.初始化 ROS 节点
rospy.init_node("talker_person_p")
#2.创建发布者对象
pub = rospy.Publisher("chatter_person",Person,queue_size=10)
#3.组织消息
# 3-1创建person数据
p = Person()
p.name = "葫芦瓦"
p.age = 18
p.height = 0.75
#4.编写消息发布逻辑
rate = rospy.Rate(1)#创建 Rate 对象
while not rospy.is_shutdown():
pub.publish(p) #发布消息
rate.sleep() #休眠
rospy.loginfo("姓名:%s, 年龄:%d, 身高:%.2f",p.name, p.age, p.height)
#%s/字符串/p.name需为字符串
#%d/十进制整数p.age需为整数
#%.2f/保留2位小数的浮点数/p.height需为浮点型2.订阅方
#! /usr/bin/env python
"""
订阅方:
订阅消息
"""
import rospy
from plumbing_pub_sub.msg import Person
def doPerson(p):
rospy.loginfo("接收到的人的信息:%s, %d, %.2f",p.name, p.age, p.height)
if __name__ == "__main__":
#1.初始化节点
rospy.init_node("listener_person_p")
#2.创建订阅者对象
sub = rospy.Subscriber("chatter_person",Person,doPerson,queue_size=10)
rospy.spin() #4.循环3.权限设置
终端下进入 scripts 执行:chmod +x *.py
4.配置 CMakeLists.txt
catkin_install_python(PROGRAMS
scripts/demo01_pub_p.py
scripts/demo02_sub_p.py
scripts/demo03_pub_person_p.py
scripts/demo04_sub_person_p.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
2.5 通信机制实操
本节主要是通过ROS内置的turtlesim案例,结合已经介绍ROS命令获取节点、话题、话题消息、服务、服务消息与参数的信息,最终再以编码的方式实现乌龟运动的控制、乌龟位姿的订阅、乌龟生成与乌龟窗体背景颜色的修改。
2.5.1 实操01_话题发布
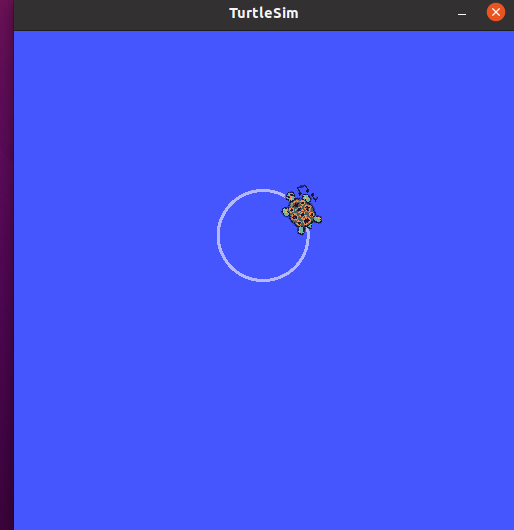
需求描述:编码实现乌龟运动控制,让小乌龟做圆周运动。
实现分析:
- 乌龟运动控制实现,关键节点有两个,一个是乌龟运动显示节点 turtlesim_node,另一个是控制节点,二者是订阅发布模式实现通信的,乌龟运动显示节点直接调用即可,运动控制节点之前是使用的 turtle_teleop_key通过键盘 控制,现在需要自定义控制节点。
- 控制节点自实现时,首先需要了解控制节点与显示节点通信使用的话题与消息,可以使用ros命令结合计算图来获取。
- 了解了话题与消息之后,通过 C++ 或 Python 编写运动控制节点,通过指定的话题,按照一定的逻辑发布消息即可。
实现流程:
- 通过计算图结合ros命令获取话题与消息信息。
- 编码实现运动控制节点。
- 启动 roscore、turtlesim_node 以及自定义的控制节点,查看运行结果。
1.话题与消息获取
准备: 先启动键盘控制乌龟运动案例。
1.1话题获取
获取话题:/turtle1/cmd_vel
通过计算图查看话题,启动计算图
rqt_graph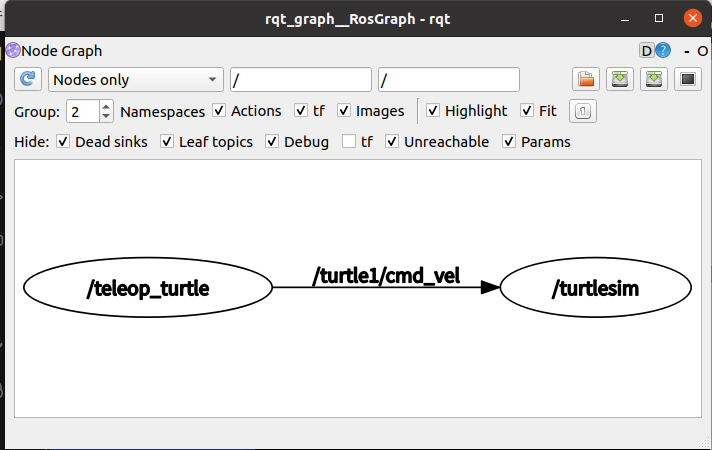
或者通过 rostopic 列出话题
rostopic list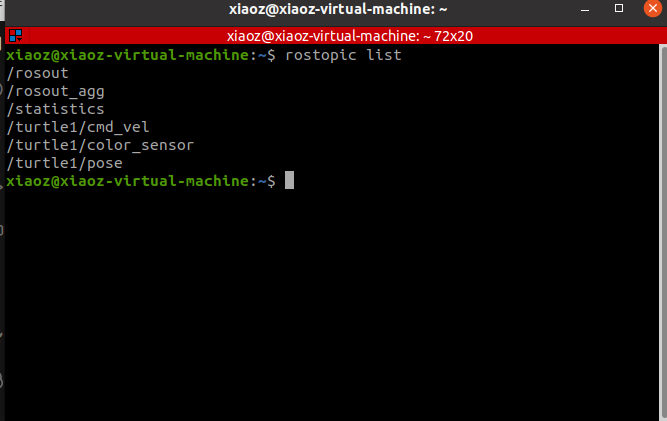
1.2消息获取
获取消息类型:geometry_msgs/Twist
rostopic type /turtle1/cmd_vel获取消息格式:
rosmsg info geometry_msgs/Twist响应结果:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 zlinear(线速度) 下的xyz分别对应在x、y和z方向上的速度(单位是 m/s);
angular(角速度)下的xyz分别对应x轴上的翻滚、y轴上俯仰和z轴上偏航的速度(单位是rad/s)。
2.实现发布节点
创建功能包需要依赖的功能包: roscpp rospy std_msgs geometry_msgs
实现方案
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
也可简单控制乌龟做圆周运动
py代码实现
#! /usr/bin/env python
"""
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.导包
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
"""
import rospy
from geometry_msgs.msg import Twist
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("control_circle_p")
# 3.创建发布者对象
pub = rospy.Publisher("/turtle1/cmd_vel",Twist,queue_size=1000)
# 4.循环发布运动控制消息
rate = rospy.Rate(10)
msg = Twist()
msg.linear.x = 1.0
msg.linear.y = 0.0
msg.linear.z = 0.0
msg.angular.x = 0.0
msg.angular.y = 0.0
msg.angular.z = 0.5
while not rospy.is_shutdown():
pub.publish(msg)
rate.sleep()权限设置以及配置文件此处略
3.运行
首先,启动 roscore;
然后启动乌龟显示节点;
最后执行运动控制节点;
最终执行结果与演示结果类似。
2.5.2 实操02_话题订阅
需求描述: 已知turtlesim中的乌龟显示节点,会发布当前乌龟的位姿(窗体中乌龟的坐标以及朝向),要求控制乌龟运动,并时时打印当前乌龟的位姿。
实现分析:
- 首先,需要启动乌龟显示以及运动控制节点并控制乌龟运动。
- 要通过ROS命令,来获取乌龟位姿发布的话题以及消息。
- 编写订阅节点,订阅并打印乌龟的位姿。
实现流程:
- 通过ros命令获取话题与消息信息。
- 编码实现位姿获取节点。
- 启动 roscore、turtlesim_node 、控制节点以及位姿订阅节点,控制乌龟运动并输出乌龟的位姿。
1.话题与消息获取
获取话题:/turtle1/pose
rostopic list获取消息类型:turtlesim/Pose
rostopic type /turtle1/pose获取消息格式:
rosmsg info turtlesim/Pose响应结果:
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity2.实现订阅节点
创建功能包需要依赖的功能包: roscpp rospy std_msgs turtlesim
可以直接运行rostopic echo /turtle1/pose
#! /usr/bin/env python
"""
订阅小乌龟的位姿: 时时获取小乌龟在窗体中的坐标并打印
准备工作:
1.获取话题名称 /turtle1/pose
2.获取消息类型 turtlesim/Pose
3.运行前启动 turtlesim_node 与 turtle_teleop_key 节点
实现流程:
1.导包
2.初始化 ROS 节点
3.创建订阅者对象
4.回调函数处理订阅的数据
5.spin
"""
import rospy
from turtlesim.msg import Pose
def doPose(data):
rospy.loginfo("乌龟坐标:x=%.2f, y=%.2f,theta=%.2f",data.x,data.y,data.theta)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("sub_pose_p")
# 3.创建订阅者对象
sub = rospy.Subscriber("/turtle1/pose",Pose,doPose,queue_size=1000)
# 4.回调函数处理订阅的数据
# 5.spin
rospy.spin()权限设置以及配置文件此处略
3.运行
首先,启动 roscore;
然后启动乌龟显示节点,执行运动控制节点;
最后启动乌龟位姿订阅节点;
最终执行结果与演示结果类似。
读书:
建立习惯的目标是用重复来改变大脑。可是大脑会抗拒改变,除非它们能大方地给大脑一些回报。因此,从大脑的角度看,在事实上改变习惯的两个关键是重复和回报。如果有回报,大脑会更愿意重复一件事。我们的行为中有 45% 是自动完成、无须思考的,既然如此,最好能让它们对我们的生活和目标有所帮助。
跑步:
跑步能收获身体健康和心理健康,治愈疲惫、焦虑和恐惧,获得心流体验和幸福!
所谓“心流”,就是当你特别专注地做一件目标明确而又有挑战的事情,而你的能力恰好能接住这个挑战时,你可能会进入的一种状态。它的特征是你做这件事的时候会忘记自己,忘记时间的流逝,你能体察到所有相关的信息,不管工作多复杂你都毫不费力,而且有强烈的愉悦感。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









