






IIC(Inter-Integrated Circuit)协议,又称为I2C(Inter IC)协议,是一种串行通信协议,它主要用于在集成电路之间传输数据。在温湿度传感器应用中,I2C协议常用于连接微控制器(如STM32)和温湿度传感器(如DHT11、AHT20、SHT11等)之间进行数据交换。
一、如何 通过IIC协议读取温湿度
以下是基于I2C协议读取温湿度的一般步骤:
-
准备硬件:
- 温湿度传感器(如DHT11、AHT20、SHT11等)
- 微控制器(如STM32)
- I2C通信线路(包括SDA和SCL引脚)
-
识别传感器地址:
不同类型的温湿度传感器具有不同的地址。例如,DHT11和AHT20的地址为0x24,SHT11的地址为0x44。请查阅相应传感器的数据手册以获取正确地址。 -
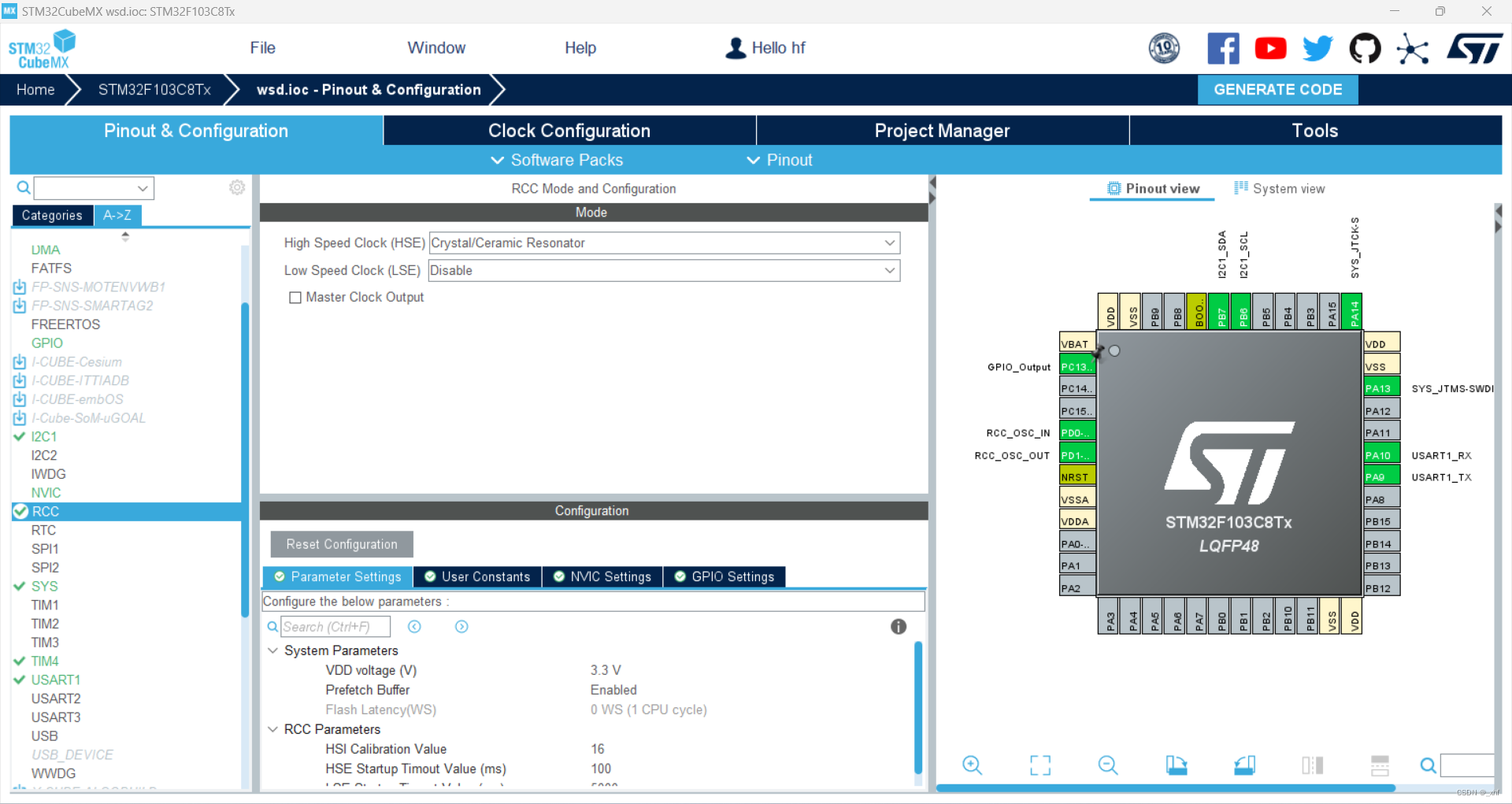
初始化I2C总线:
使用微控制器的I2C模块初始化I2C总线,包括配置相关引脚、时钟源、数据速率等。 -
发送命令:
通过I2C总线向温湿度传感器发送特定的命令,以启动温湿度测量。例如,对于DHT11,需要发送一个启动测量湿度的命令;对于SHT11,需要发送一个启动测量温度和湿度的命令。 -
读取数据:
在温湿度传感器完成测量后,通过I2C总线读取测量数据。对于DHT11,需要读取两个字节的数据,分别为湿度整数值和温度整数值;对于SHT11,需要读取六个字节的数据,分别为温度整数值、湿度整数值、校验和等。 -
解析数据:
根据温湿度传感器的数据手册,将读取到的数据解析为实际的温度和湿度值。例如,DHT11的数据手册提供了湿度值的转换公式,可以通过解析数据得到实际的湿度值;SHT11的数据手册提供了温度和湿度的转换公式,可以根据数据计算出实际的温度和湿度值。 -
错误检测与处理:
在数据传输过程中,应检测并处理可能出现的错误,如CRC校验失败、数据传输中断等。
本次实验使用的的32cubemx和串口通信助手完成实验
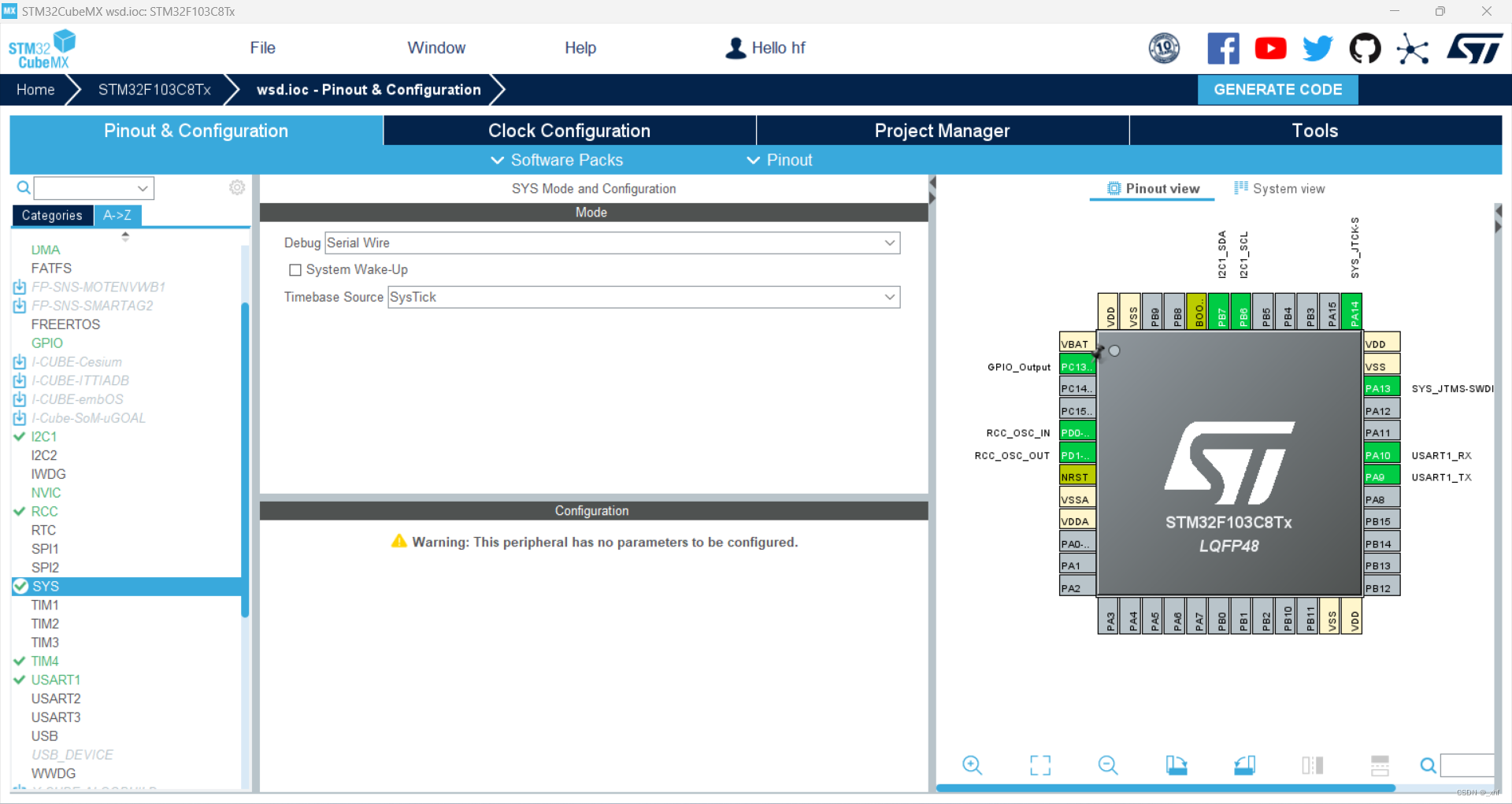
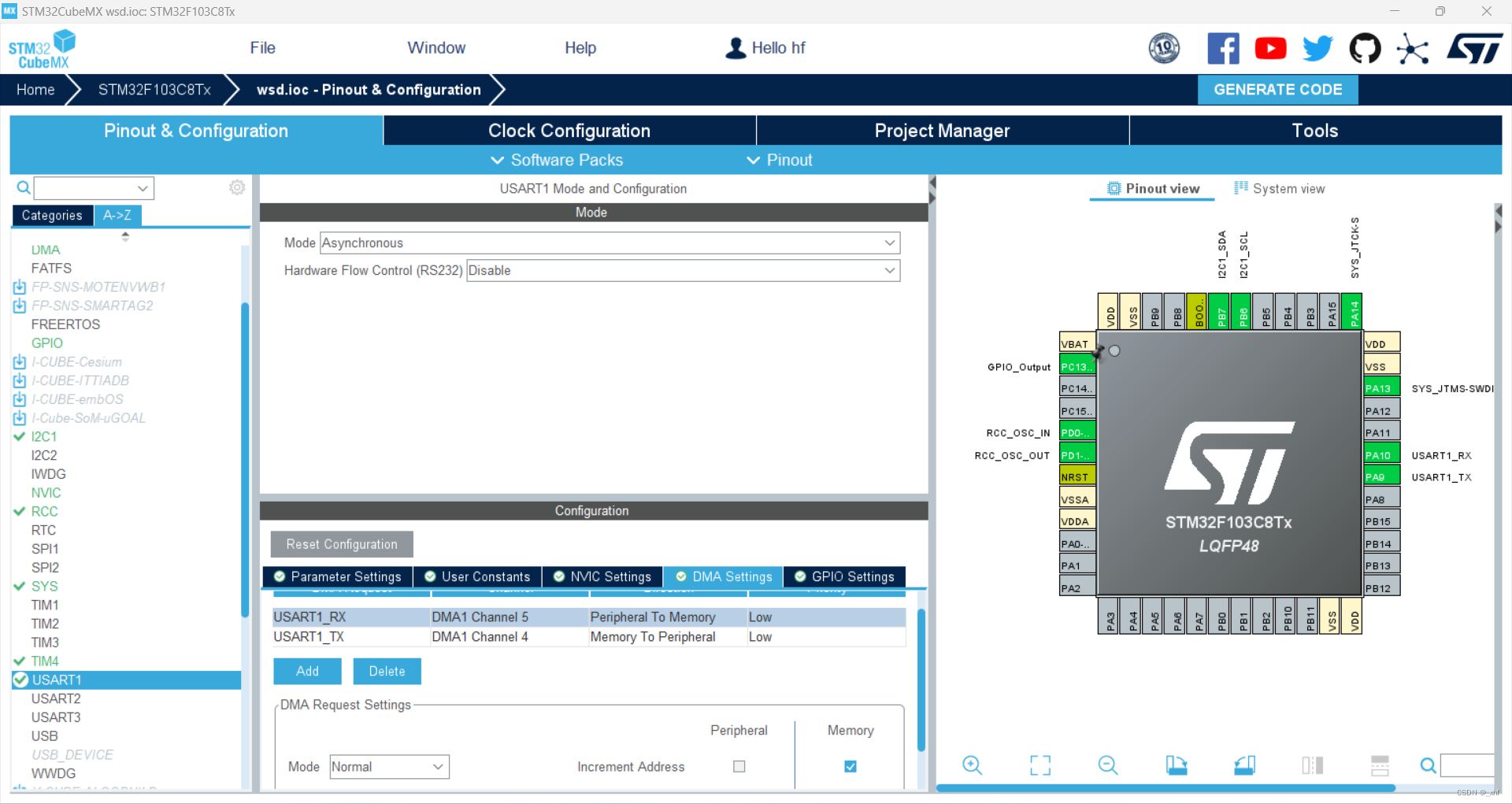
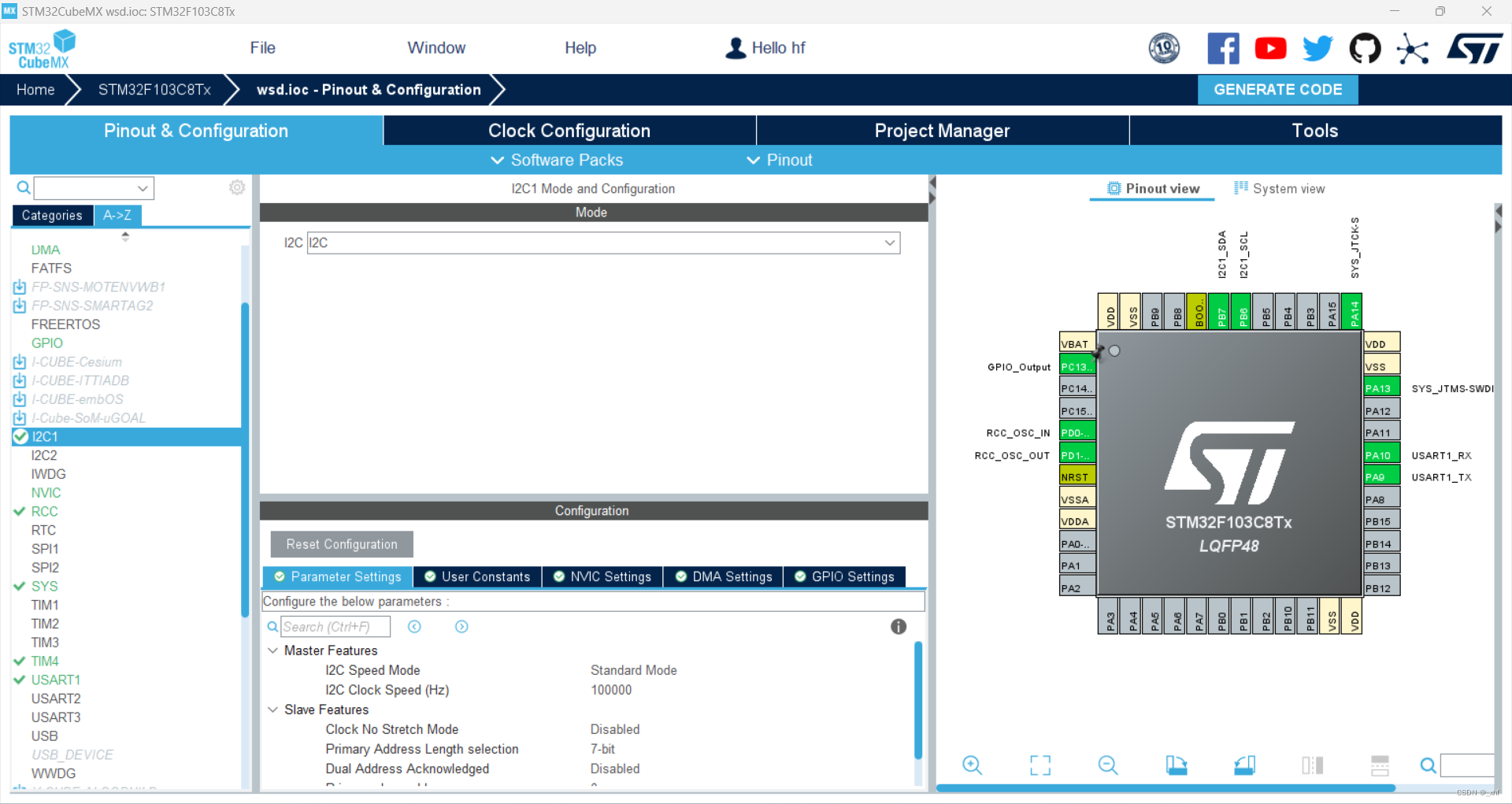
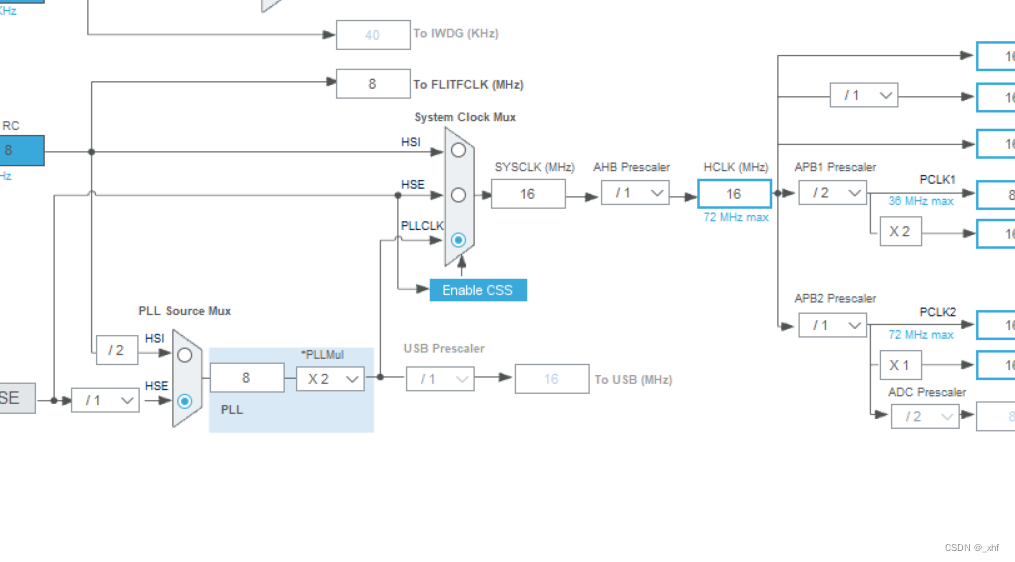
二、32cubemx设置
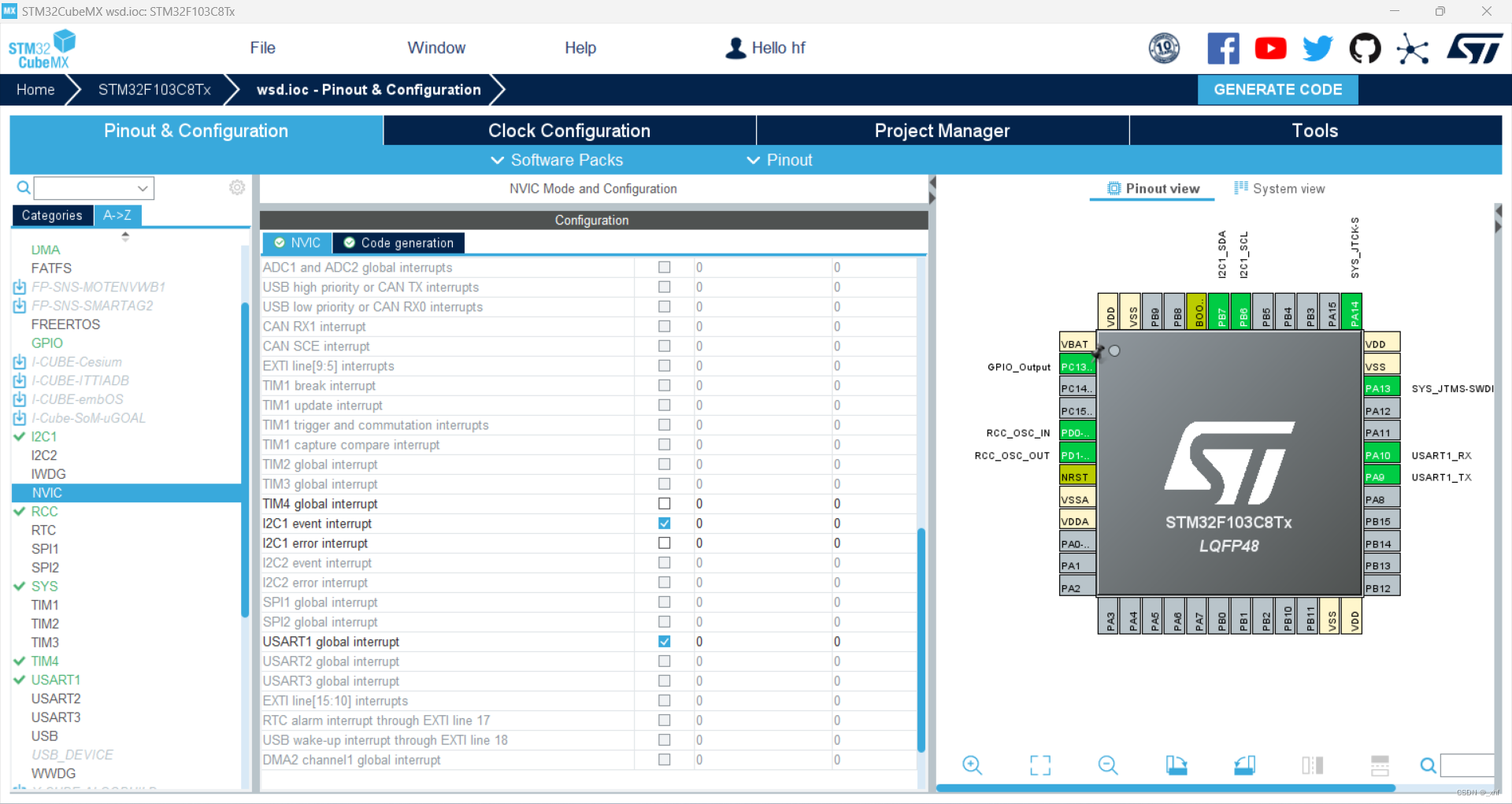
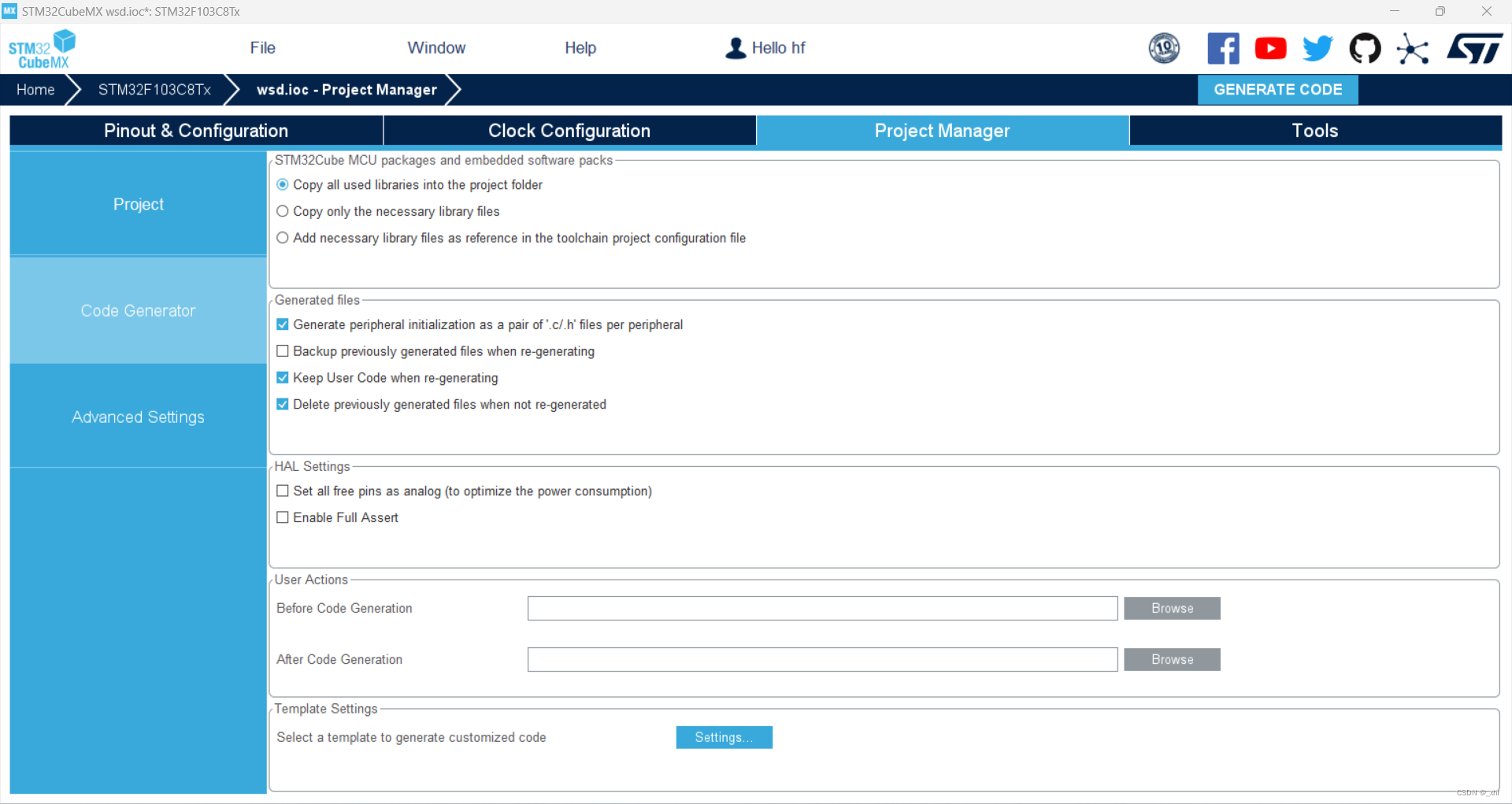
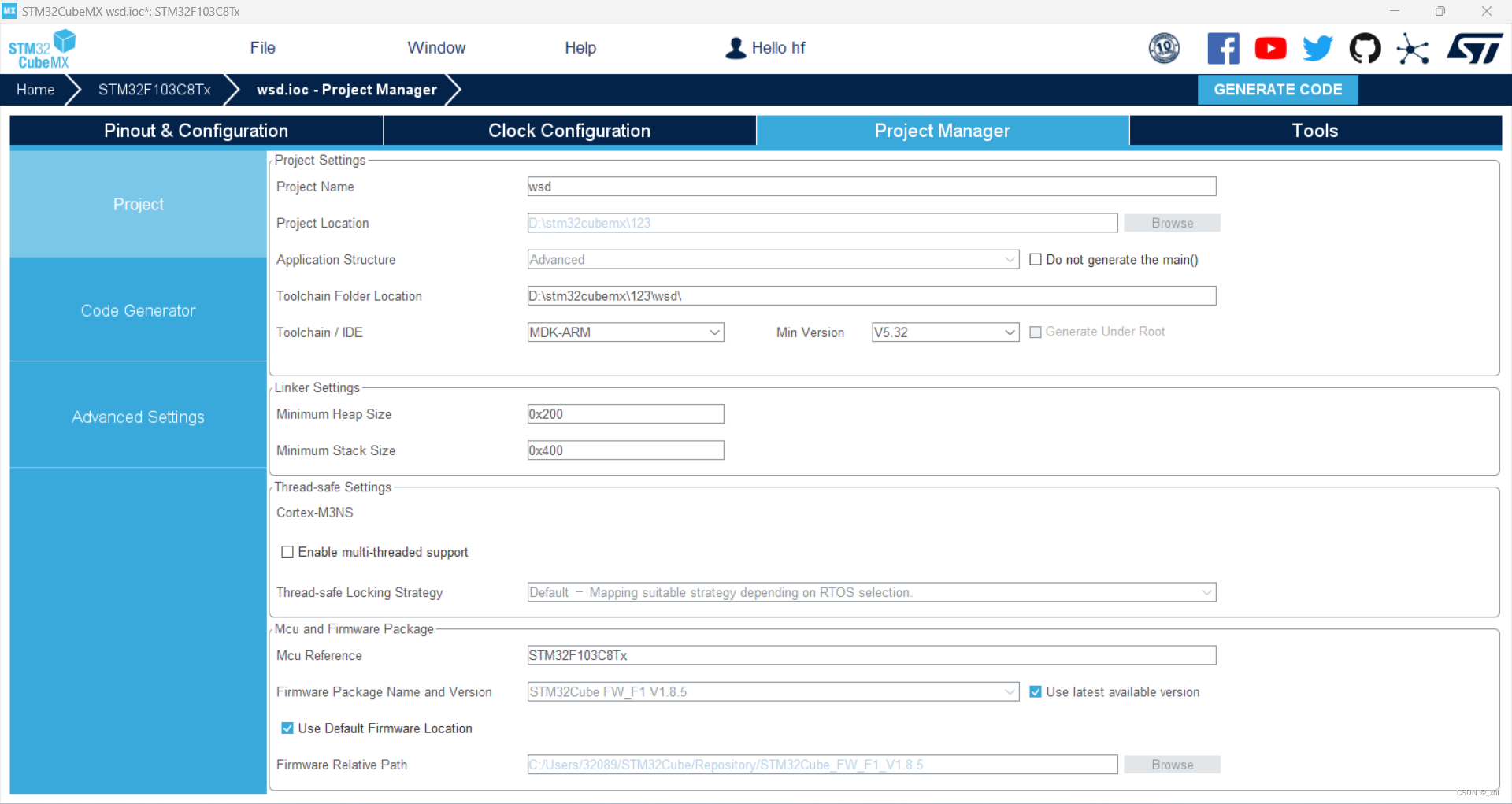
做完以上步骤后编写文件打开文件进入keil内改写代码
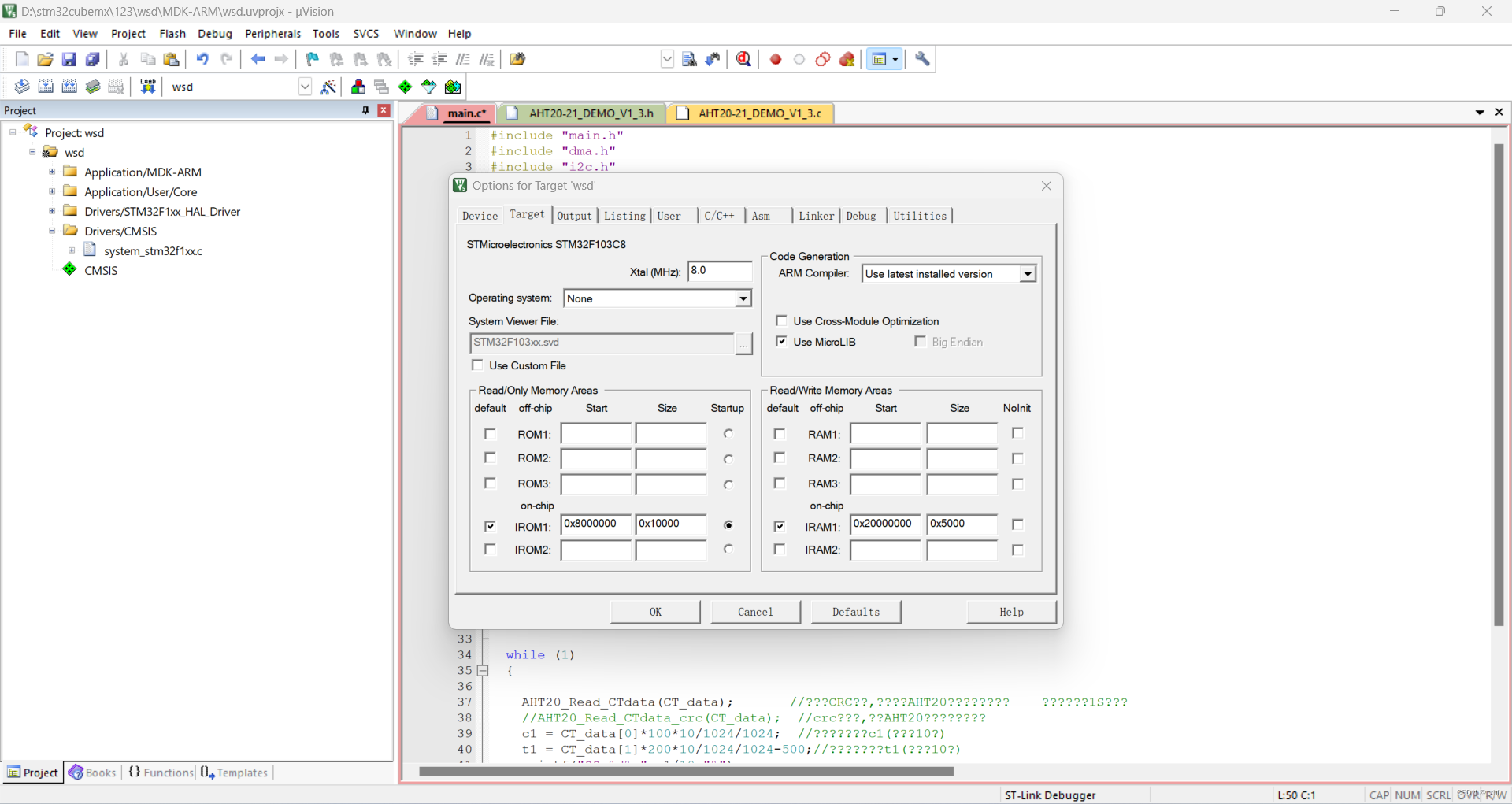
三、keil内设置和代码
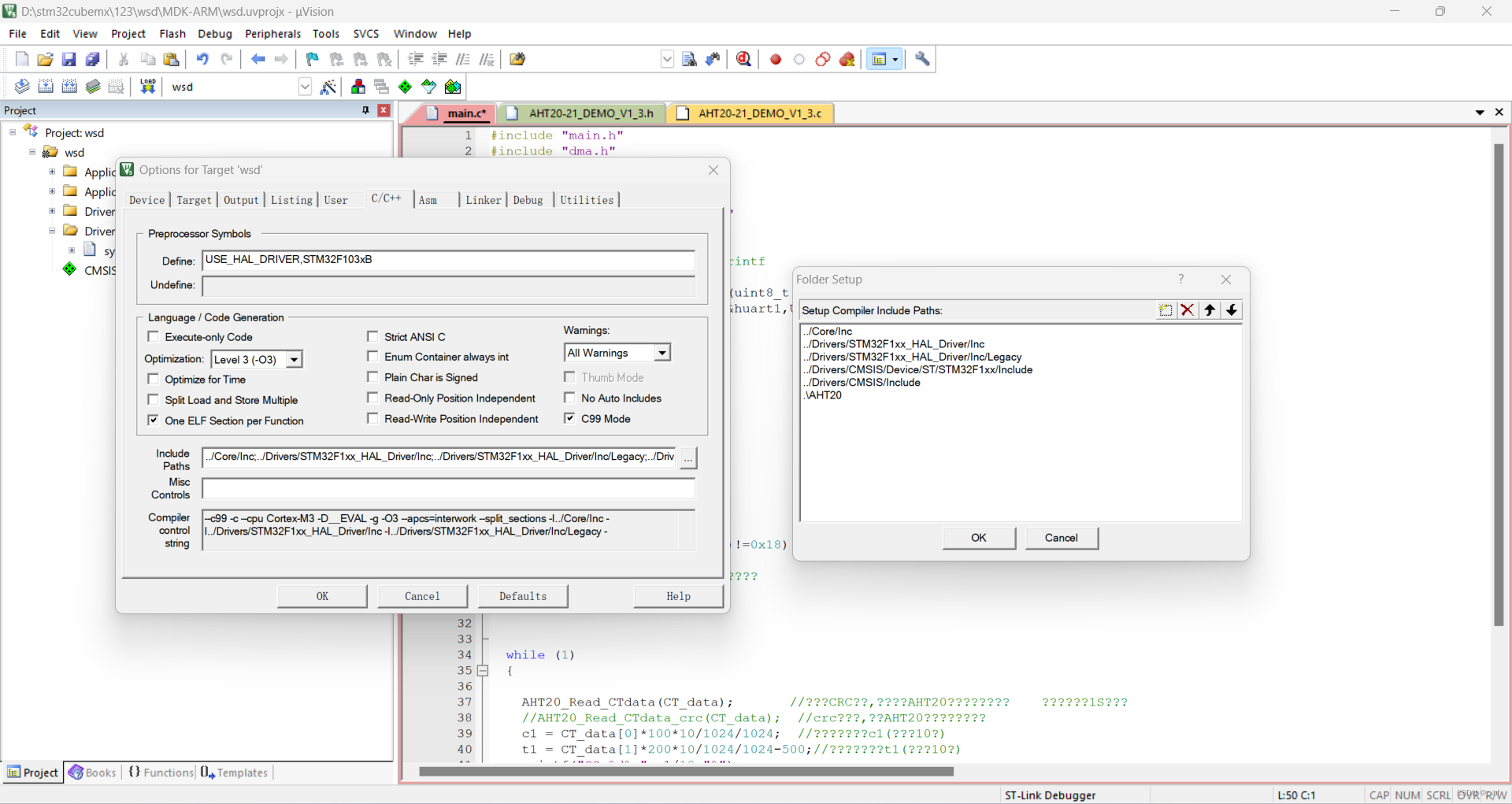
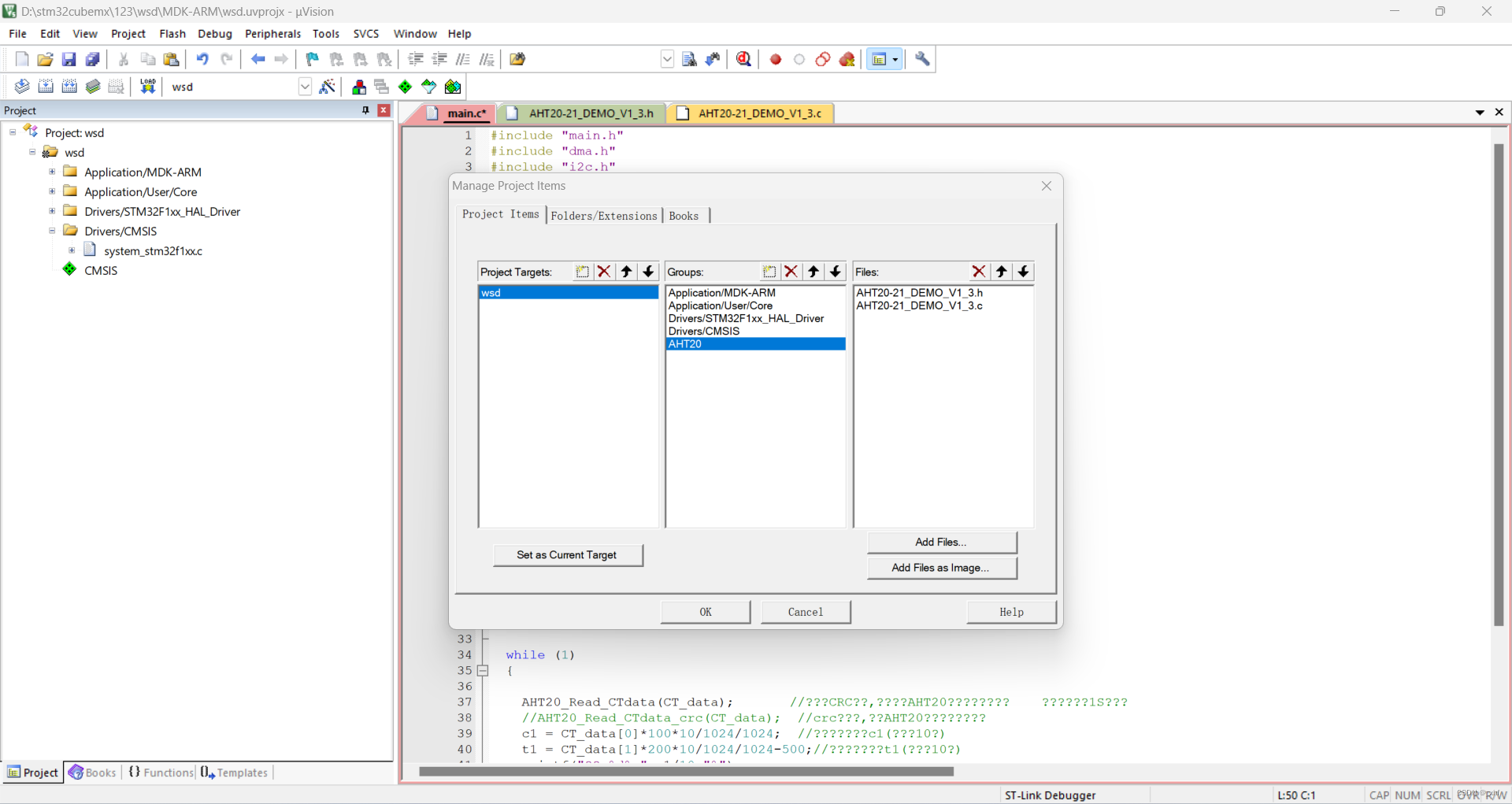

这里加入了奥松的文件,代码如下
AHT20-21_DEMO_V1_3.c
//#include "main.h"
#include "AHT20-21_DEMO_V1_3.h"
#include "gpio.h"
#include "i2c.h"
void Delay_N10us(uint32_t t)//????
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//????
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //????
{
while(t--)
{
SensorDelay_us(1000);//??1ms
}
}
//void AHT20_Clock_Init(void) //????
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //?PB7????? , ???????, PB7??I2C?SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
void SDA_Pin_Output_Low(void) //?P7????? ???????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
void SDA_Pin_IN_FLOATING(void) //SDA???????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//??
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL?????,P14??I2C?SCL
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void SCL_Pin_Output_Low(void) //SCL?????
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
}
void Init_I2C_Sensor_Port(void) //???I2C??,??????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
}
void I2C_Start(void) //I2C????START??
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //?AHT20?????
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//?AHT20??????
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
//if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1;
Byte = (Byte<<1)|a;
//SCL_Pin_Output_Low();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //?AHT20?????ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //????ACK??
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //?????ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //??????
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//??AHT20??????
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //??cal enable??????
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //?AHT20??AC??
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC????
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC????:CRC8/MAXIM
//???:X8+X5+X4+1
//Poly:0011 0001 0x31
//????????? 1000 1100 0x8c
//C????:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //??CRC??,????AHT20????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//?AHT10??AC??
Delay_1ms(80);//??80ms??
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//????bit[7]?0,???????,??1,?????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//???,??????0x98,??????,bit[7]?1;???0x1C,??0x0C,??0x08???????,bit[7]?0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//??
Send_ACK();
Byte_3th = AHT20_RD_Byte();//??
Send_ACK();
Byte_4th = AHT20_RD_Byte();//??/??
Send_ACK();
Byte_5th = AHT20_RD_Byte();//??
Send_ACK();
Byte_6th = AHT20_RD_Byte();//??
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//??
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //??
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC???,??AHT20????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//??CRC????
AHT20_SendAC();//?AHT10??AC??
Delay_1ms(80);//??80ms??
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//????bit[7]?0,???????,??1,?????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//???,??????0x98,??????,bit[7]?1;???0x1C,??0x0C,??0x08???????,bit[7]?0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//??/??
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//??
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC??
Send_NOT_ACK(); //??: ?????NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//??
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //??
}
else
{
ct[0]=0x00;
ct[1]=0x00;//???????,????????????
}//CRC??
}
void AHT20_Init(void) //???AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8??NOR????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE?????,AHT20???????0xBE, AHT10???????0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//?????bit[3]?1,?????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//???0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//??5ms??
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);//?????
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
AHT20-21_DEMO_V1_3.h
#ifndef _AHT20_DEMO_
#define _AHT20_DEMO_
#include "main.h"
void Delay_N10us(uint32_t t);//????
void SensorDelay_us(uint32_t t);//????
void Delay_4us(void); //????
void Delay_5us(void); //????
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //????
void SDA_Pin_Output_High(void) ; //?PB15????? , ???????, PB15??I2C?SDA
void SDA_Pin_Output_Low(void); //?P15????? ???????
void SDA_Pin_IN_FLOATING(void); //SDA???????
void SCL_Pin_Output_High(void); //SCL?????,P14??I2C?SCL
void SCL_Pin_Output_Low(void); //SCL?????
void Init_I2C_Sensor_Port(void); //???I2C??,??????
void I2C_Start(void); //I2C????START??
void AHT20_WR_Byte(uint8_t Byte); //?AHT20?????
uint8_t AHT20_RD_Byte(void);//?AHT20??????
uint8_t Receive_ACK(void); //?AHT20?????ACK
void Send_ACK(void) ; //????ACK??
void Send_NOT_ACK(void); //?????ACK
void Stop_I2C(void); //??????
uint8_t AHT20_Read_Status(void);//??AHT20??????
uint8_t AHT20_Read_Cal_Enable(void); //??cal enable??????
void AHT20_SendAC(void); //?AHT20??AC??
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //??CRC??,????AHT20????????
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC???,??AHT20????????
void AHT20_Init(void); //???AHT20
void JH_Reset_REG(uint8_t addr);///?????
void AHT20_Start_Init(void);///?????????????
#endif
然后改写main.c里的代码
#include "main.h"
#include "dma.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
#include "AHT20-21_DEMO_V1_3.h"
#include <stdio.h>
#include <string.h>
int fputc(int ch,FILE *f)//??printf
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF);
while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET){
}
return ch;
}
void SystemClock_Config(void);
volatile int c1,t1;
uint32_t CT_data[2]={0,0};
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_USART1_UART_Init();
MX_DMA_Init();
MX_I2C1_Init();
AHT20_Init();//??????
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //????????
Delay_1ms(10);
}
while (1)
{
AHT20_Read_CTdata(CT_data); //???CRC??,????AHT20???????? ??????1S???
//AHT20_Read_CTdata_crc(CT_data); //crc???,??AHT20????????
c1 = CT_data[0]*100*10/1024/1024; //???????c1(???10?)
t1 = CT_data[1]*200*10/1024/1024-500;//???????t1(???10?)
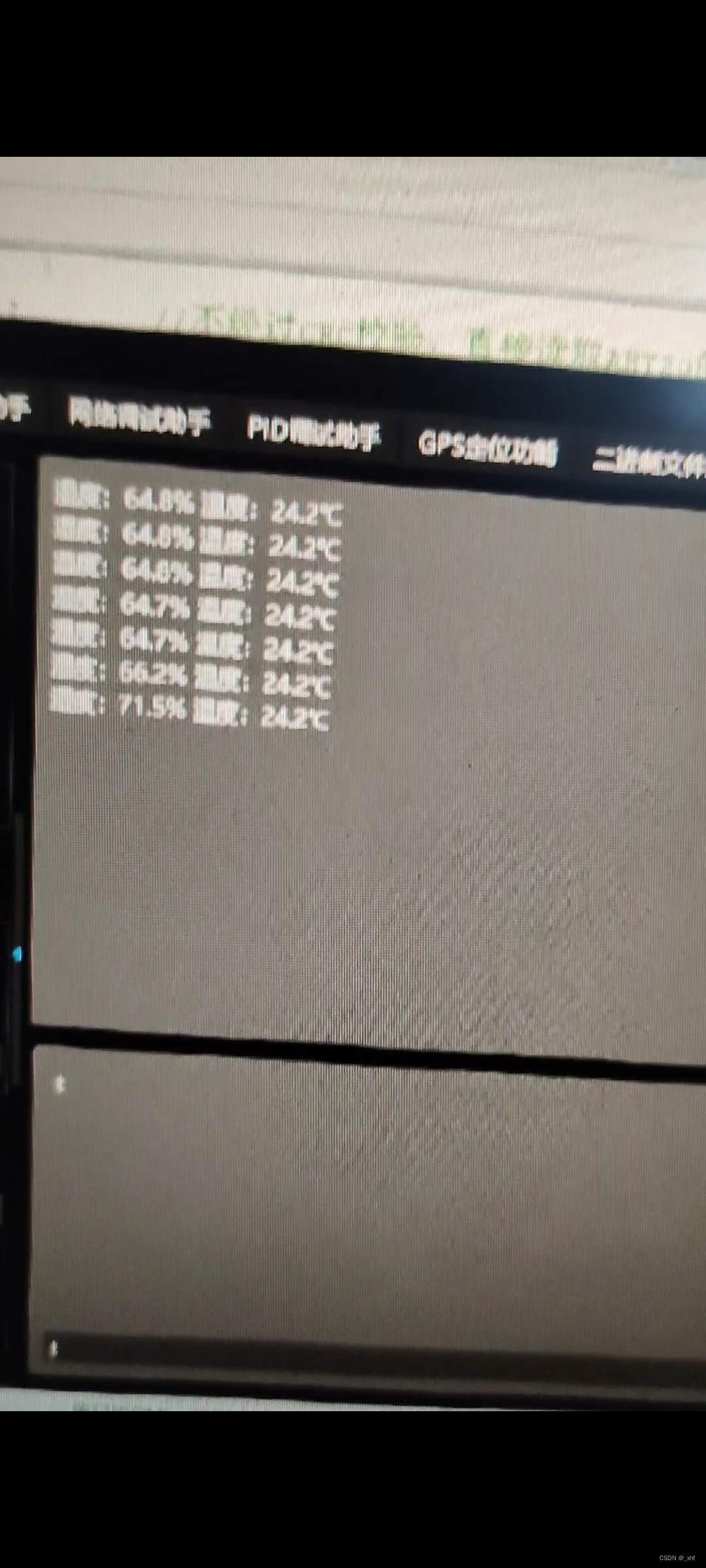
printf("??:%d%s",c1/10,"%");
printf("??:%d%s",t1/10,"?");
printf("\r\n");
HAL_Delay(3000);
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
编译生成hex文件
四、烧录测试














 923
923











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









