







MC_GearOut
- 中止执行中的MC_GearIn(齿轮动作开始)指令、MC_GearInPos(位置指定齿轮动作)指令。
| 指令 | 名称 | FB/ FUN | 图形表现 | ST表现 |
|---|---|---|---|---|
| MC_GearOut | 齿轮动作解除 | FB |  | MC_GearOut_instance ( Slave :=《参数》 , Execute :=《参数》 , Deceleration :=《参数》 , Jerk :=《参数》 , OutMode :=《参数》 , Done =>《参数》 , Busy =>《参数》 , CommandAborted =>《参数》 , Error =>《参数》 , ErrorID =>《参数》 ); |
变量
▶输入变量
| 输入变量 | 名称 | 数据类型 | 有效范围 | 初始值 | 内容 |
|---|---|---|---|---|---|
| Execute | 启动 | BOOL | TRUE, FALSE | FALSE | 在上升沿开始指令。 |
| Deceleration | 减速度 | LREAL | 正数或“0” | 0 | 指定减速度。 单位为[指令单位/s2]。 *1 |
| Jerk (Reserved) | 跃度 | LREAL | 0 | 0 | (Reserved) |
- 1.关于指令单位,请参阅“NJ/NX系列CPU单元用户手册运动控制篇(SBCE-363)”或“NY系列工业用平板电脑/工业用台式电脑用户手册运动控制篇(SBCE-379)”的“单位转换设定”。
- 2.有效范围为枚举体的变量,其实际初始值不是数值,而是枚举元素。
▶输出变量
| 输出变量 | 名称 | 数据类型 | 有效范围 | 内容 |
|---|---|---|---|---|
| Done | 完成 | BOOL | TRUE, FALSE | 指令执行完毕时变为TRUE。 |
| Busy | 执行中 | BOOL | TRUE, FALSE | 接收指令后变为TRUE。 |
| CommandAborted | 执行中断 | BOOL | TRUE, FALSE | 指令中止时,变为TRUE。 |
| Error | 错误 | BOOL | TRUE, FALSE | 发生异常时变为TRUE。 |
| ErrorID | 错误代码 | WORD | * | 发生异常时,输出错误代码。16#0000为正常。 |
- 请参阅 “A-1 错误代码一览(P.A-2)”
► 输出变量的反映时间
| 变量 | 变为TRUE的时间 | 变为FALSE的时间 |
|---|---|---|
| Done | 指令完成时 | • Execute为TRUE时,与Execute的FALSE同时 • Execute为FALSE时,1个周期后 |
| Busy | Execute的上升沿 | • Done变为TRUE时 • Error变为TRUE时 • CommandAborted变为TRUE时 |
| CommandAborted | • 利用其它指令多重启动运动指令(中断),中止本 指令时 • 因发生异常,中止本指令时 • 发生异常过程中,启动本指令时 • 执行MC_Stop指令中,启动本指令时 | • Execute为TRUE时,与Execute的FALSE同时 • Execute为FALSE时,1个周期后 |
| Error | 本指令的启动条件或输入参数中含有异常因素时 | 异常已解除时 |
▶输入输出变量
| 输入输出变量 | 名称 | 数据类型 | 有效范围 | 内容 |
|---|---|---|---|---|
| Slave | 从轴 | _sAXIS_REF | - | 指定从轴。 *1 |
- 请使用在Sysmac Studio的轴基本设定画面中创建的用户定义变量的轴变量名称(默认 “MC_Axis***”)或系统定义变量的 轴变量名称(_MC_AX[], _MC1_AX[], _MC2_AX[*])。
功能说明
- 通过Slave(从轴)指定动作对象轴,指定Deceleration(减速度),中止执行中的MC_GearIn(齿轮动作开始)指令、MC_GearInPos(位置指定齿轮动作)指令。
- 本指令对MC_GearIn(齿轮动作开始)指令、MC_GearInPos(位置指定齿轮动作)指令的主轴动作没有影响。
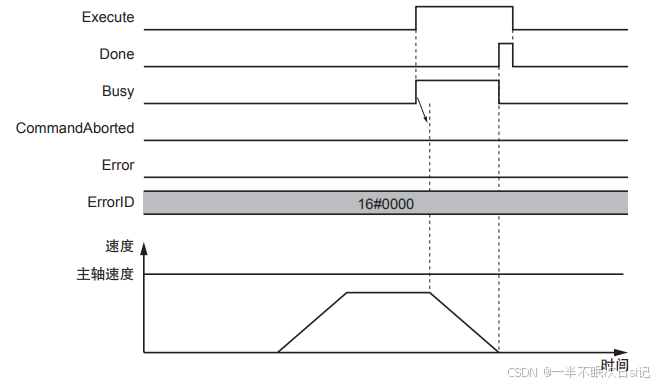
▶时序图
- 在启动Execute(启动)的同时,Busy(执行中)变为TRUE。
- 达到目标速度时,Done(完成)变为TRUE。
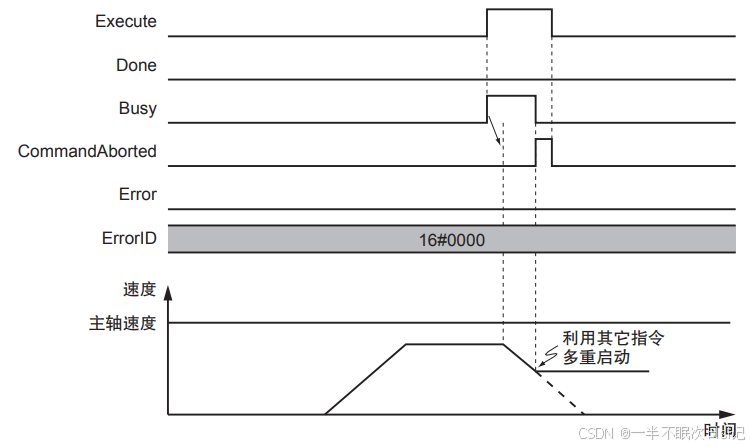
- 利用其它指令中断本指令时,CommandAborted(执行中断)变为TRUE,Busy(执行中)变为FALSE。
► 利用其它指令中断本指令时
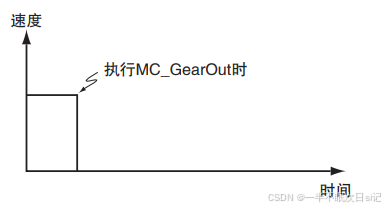
► 将减速度指定为“0”启动时
- 将减速度指定为“0”启动时,不减速而停止。
- 减速度为“0”时的动作示例如下所示。
▶重启运动指令
- 无法重启本指令。
- 重启后,将发生“无法重启运动指令(错误代码:543B Hex)”错误。
▶多重启动运动指令
- 多重启动运动指令的详情,请参阅“NJ/NX系列 CPU单元 用户手册 运动控制篇(SBCE-363)”或“NY系列 工业用平板电脑/工业用台式电脑 用户手册 运动控制篇(SBCE-379)”。
► 其它指令执行中的本指令启动
- 在执行MC_GearIn(齿轮动作开始)指令或MC_GearInPos(位置指定齿轮动作)指令中启动本指令时,中断执行(CommandAborted)MC_GearIn(齿轮动作开始)指令或MC_GearInPos(位置指定齿轮动作)指令,本指令变为Busy(执行中)。
- 在执行MC_GearIn(齿轮动作开始)指令或MC_GearInPos(位置指定齿轮动作)指令以外的指令中启动本指令时,本指令变为Error(错误)。
► 本指令执行中的其它指令启动
- 对本指令执行运动指令多重启动时,请指定从轴。
- 对本指令进行多重启动运动指令时,可选择中断、等待。
▶异常
- 启动本指令发生异常时,Error(错误)变为TRUE。
- 可查看ErrorID(错误代码)的输出值,了解发生异常的原因。
► 发生异常时的时序图
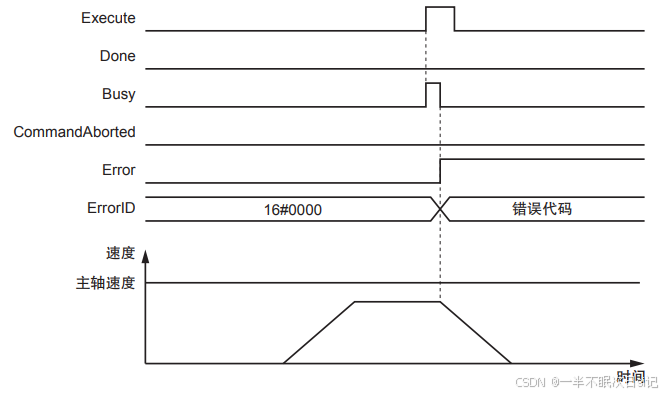
► 错误代码
- 关于指令发生的异常,请参阅“A-1 错误代码一览(P.A-2)”。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











