






介绍
TM32微控制器提供了输入捕获(Input Capture)功能,这是一种用于精确测量外部信号脉冲宽度和周期的强大技术。输入捕获通常与定时器(如TIM)的高级控制定时器(TIM1和TIM8)或通用定时器(TIM2至TIM5)配合使用。
输入捕获的工作原理
输入捕获模式允许用户在定时器的计数器与一个外部信号(通常是一个边沿触发信号)的边沿同步时,捕获定时器的当前计数值。通过捕获信号的两个连续边沿之间的定时器计数值,可以计算出信号的脉冲宽度或周期。
输入捕获的关键特性
- 时间戳功能:能够记录信号边沿的确切时刻。
- 方向检测:可以检测信号的上升沿和下降沿,从而判断信号的频率和方向。
- 脉冲计数和频率测量:通过计算两个连续捕获事件之间的时间差,可以测量信号的频率和周期。
- 脉宽调制(PWM)信号分析:可以分析PWM信号的占空比和频率。
如何使用STM32的输入捕获
- 配置定时器和通道:选择一个定时器,并配置其通道为输入捕获模式。
- 选择输入信号:将外部信号连接到定时器的相应输入引脚。
- 配置触发边沿:设置捕获信号是上升沿还是下降沿触发,或者两者都触发。
- 配置预分频器和计数器:根据输入信号的频率和所需的分辨率来配置定时器的预分频器和自动重装载寄存器(ARR)。
- 中断和回调函数:配置输入捕获中断,并在中断服务例程中读取捕获寄存器的值,以计算信号的时间参数。
注意事项
- 时钟源选择:确保定时器时钟源配置正确,以获得准确的计时。
- 采样率:根据信号频率选择合适的采样率,以避免信号变化太快而无法准确捕获。
- 噪声抑制:可能需要对输入信号进行去抖动处理,以防止误触发。
哪些定时器有输入捕获
-
高级控制定时器(TIM1和TIM8):这些定时器提供了最丰富的功能,包括输入捕获、输出比较、PWM生成等。
-
通用定时器(TIM2至TIM5):这些定时器也支持输入捕获,但功能相对于高级控制定时器来说较少。
-
基本定时器(TIM6和TIM7):这些定时器主要用于简单的时间计数,不支持输入捕获功能。
-
低功耗定时器(LPTIM):在某些STM32微控制器中,还可能包括低功耗定时器,它们在低功耗模式下非常有用,但可能不支持输入捕获。
STM32Cude设置
1时钟源设置

2开启输入捕获

3输入捕获的设置
配置选项介绍

-
Polarity Selection:这个选项允许你选择捕获信号的边沿极性。你可以选择:
- Rising Edge:只在信号的上升沿捕获计数器的值。
- Falling Edge:只在信号的下降沿捕获计数器的值。
- Both Edges:在信号的上升沿和下降沿都捕获计数器的值。
-
IC Selection:这个选项决定了输入信号的来源。通常,你可以选择:
- Direct:直接连接到定时器的输入通道,不经过任何其他硬件处理。
- Indirect:通过一个滤波器或信号处理器连接到定时器的输入通道。
-
Prescaler Division Ratio:这个选项允许你设置一个预分频器,用于降低输入信号的频率。你可以选择不进行预分频(No division),或者选择2、4、8等分频比,以便在捕获之前降低信号的频率。
-
Input Filter (4 bits value):这个选项允许你设置一个数字滤波器,用于减少输入信号上的噪声。滤波器的宽度可以从0到15,其中0表示不使用滤波器,而15表示最强的滤波器设置。滤波器的宽度决定了信号必须保持新电平多长时间才能被视为有效跳变。

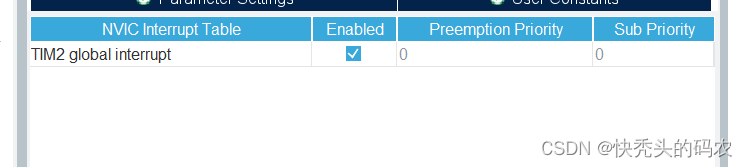
4开启中断
之后生成代码
代码设置
有哪些函数
-
HAL_TIM_IC_Init:用于初始化定时器的输入捕获通道。
HAL_StatusTypeDef HAL_TIM_IC_Init(TIM_HandleTypeDef *htim); -
HAL_TIM_IC_ConfigChannel:用于配置定时器的输入捕获通道
HAL_StatusTypeDef HAL_TIM_IC_ConfigChannel(TIM_HandleTypeDef *htim, TIM_IC_InitTypeDef *sConfigIC, uint32_t Channel); -
HAL_TIM_IC_Start:用于启动输入捕获。
HAL_StatusTypeDef HAL_TIM_IC_Start(TIM_HandleTypeDef *htim, uint32_t Channel); -
HAL_TIM_IC_Start_IT:用于启动输入捕获并使能中断。
HAL_StatusTypeDef HAL_TIM_IC_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel); -
HAL_TIM_IC_Stop:用于停止输入捕获。
HAL_StatusTypeDef HAL_TIM_IC_Stop(TIM_HandleTypeDef *htim, uint32_t Channel); -
HAL_TIM_IC_Stop_IT:用于停止输入捕获并禁用中断。
HAL_StatusTypeDef HAL_TIM_IC_Stop_IT(TIM_HandleTypeDef *htim, uint32_t Channel); -
HAL_TIM_IRQHandler:用于定时器中断处理函数,需要在用户定义的中断服务例程中调用
-
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim); -
HAL_TIM_IC_CaptureCallback:用于输入捕获中断的回调函数,需要在
HAL_TIM_IRQHandler中调用。-
是捕获一次返回一次中断
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim);
-
2实验思路将PWM产生的波,用通道1进行捕获返回捕获的值
main.h源码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){
//获取占空比中的频率 要获取一个周期的频率 =频率/(预分频+重装值);重装值为 第二次计数减去第一次计数
uint32_t tim__CNT=__HAL_TIM_GET_COUNTER(htim);//当前计数值
uint32_t tim__PSC=TIM2->PSC;//预分频值
uint32_t PAB1_HZ=72000000;//PAB1频率
uint32_t data=PAB1_HZ/(tim__CNT+tim__PSC);//占空的频率
char aa[10];
sprintf(aa,"频率%06d",data);
HAL_UART_Transmit(&huart1,(uint8_t*)aa,10,20);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//启动捕获
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//启动PWM
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
总结
输入捕获就是在产生输入波形的信号时产生一个反馈信号















 3794
3794











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









