







效果一览
- Kalman_filter_smoothing.m 说明了卡尔曼滤波器和卡尔曼平滑器。 它产生如下两个图:
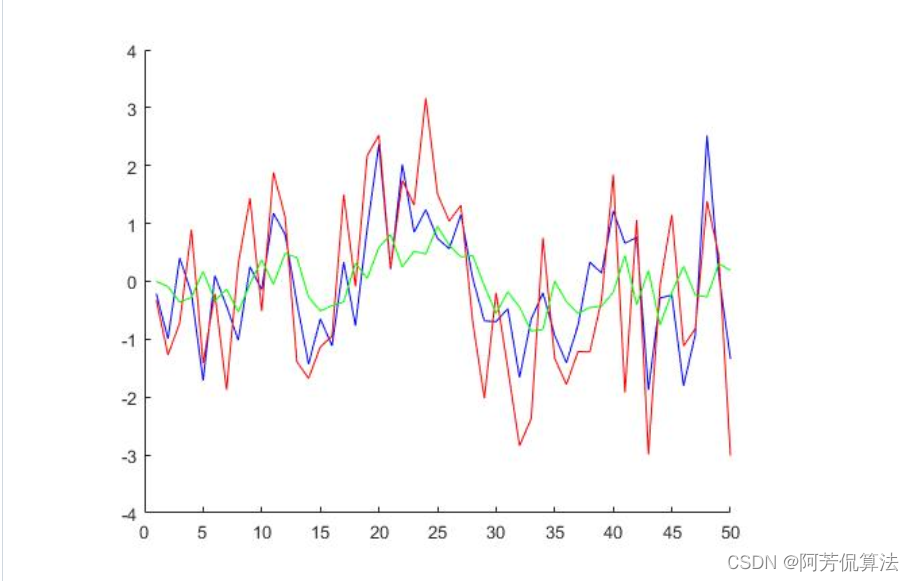
- 这里蓝色是基础状态(未观察到),红色是观察结果,绿色是过滤器预测。
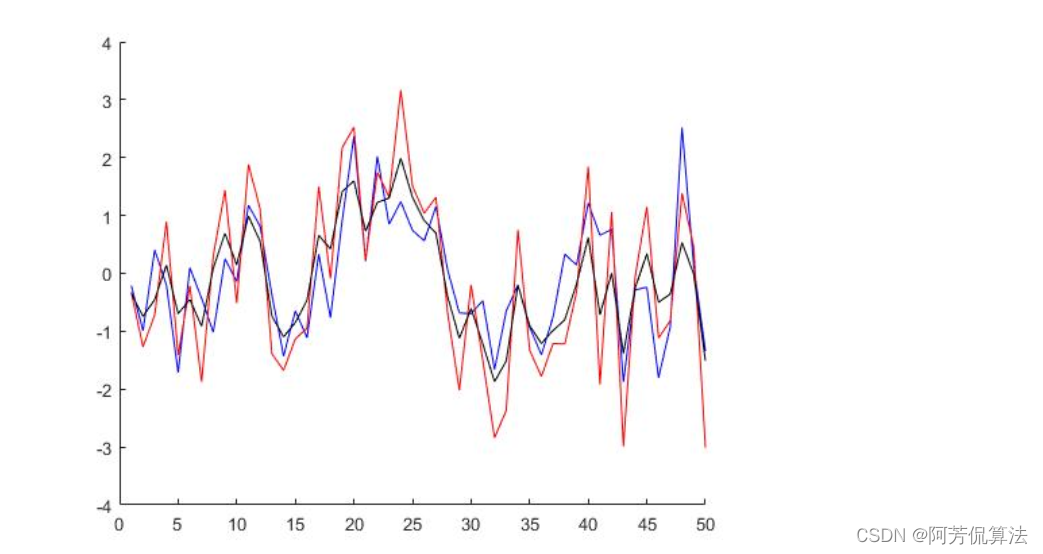
- 蓝色是状态,红色是观察,黑色是平滑估计(事后最好的预测)。
Kalman_missing_data.m 说明了使用卡尔曼滤波器和卡尔曼平滑器来估算缺失数据。
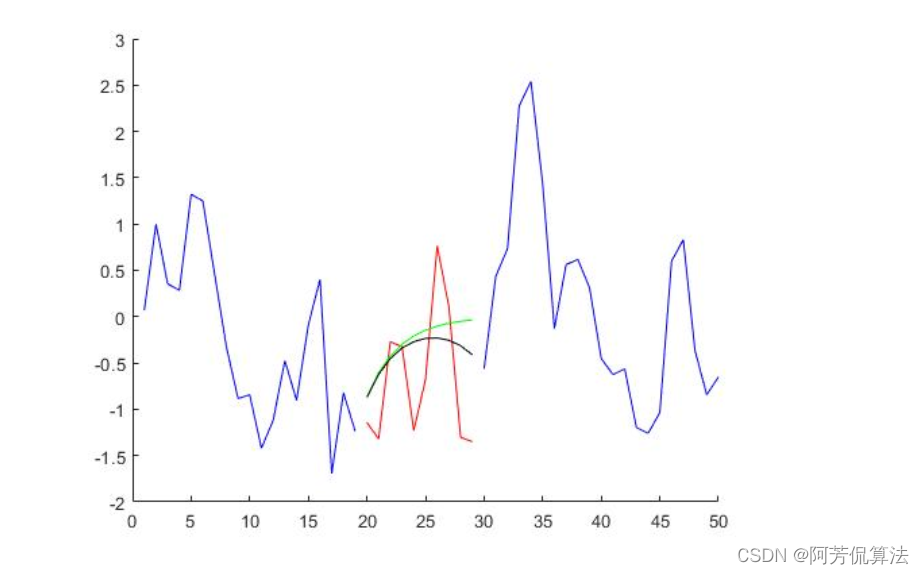
这里蓝色是状态,红色是数据缺失的状态,绿色是缺失部分的过滤器外推,黑色是缺失部分的更平滑插值。
文章概述
Matlab实现卡尔曼滤波(Kalman Filtering)、卡尔曼平滑器(Kalman smoother)和缺失数据插值。
研究内容
受噪声干扰的状态量是个随机量,不可能测得精确值,但可对它进行一系列观测,并依据一组观测值,按某

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 7852
7852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











