







yolov5 int8量化
资料参考:用POT工具实现YOLOv5模型INT8量化 - 简书 (jianshu.com)
安装环境
pip install openvino-dev
转openvino
python export.py --weights best.pt --include openvino
得到如下文件
将下面的代码复制到Yolov5项目中,我将其命名为yolov5_pot_int8.py
#该代码是将yolov5量化成int8格式,在进行推理的时候可以直接使用yolov5的detect.py
# ,在选择权重路径的时候需要将xml文件的目录修改成xx_openvino_model,然后将该目录放入weight就行
#例如: parser.add_argument('--weights', nargs='+', type=str, default='/mnt/bb/yc/yolov5/runs/train/exp63/weights/last_openvino_model', help='model path or triton URL')
import argparse
import getopt
import os
import shutil
import sys
import numpy as np
import torch
from pathlib import Path
from addict import Dict
from utils.dataloaders import create_dataloader
from utils.general import check_dataset, non_max_suppression, scale_boxes, xywh2xyxy, check_yaml, increment_path
from utils.metrics import ap_per_class
from val import process_batch
from openvino.tools.pot.api import Metric, DataLoader
from openvino.tools.pot.engines.ie_engine import IEEngine
from openvino.tools.pot.graph import load_model, save_model
from openvino.tools.pot.graph.model_utils import compress_model_weights
from openvino.tools.pot.pipeline.initializer import create_pipeline
from openvino.tools.pot.utils.logger import init_logger, get_logger
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
'''
Create a class for the loading YOLOv5 dataset
and annotation which inherits from POT API class DataLoader.
The Ultralytics YOLOv5 training process requires image data normalization
from [0,225] 8-bit integer range to [0.0,1.0] 32-bit floating point range.
'''
class YOLOv5DataLoader(DataLoader):
""" Inherit from DataLoader function and implement for YOLOv5.
"""
def __init__(self, config):
if not isinstance(config, Dict):
config = Dict(config)
super().__init__(config)
self._data_source = config.data_source
self._imgsz = config.imgsz
self._batch_size = 1
self._stride = 32
self._single_cls = config.single_cls
self._pad = 0.5
self._rect = False
self._workers = 1
self._data_loader = self._init_dataloader()
self._data_iter = iter(self._data_loader)
def __len__(self):
return len(self._data_loader.dataset)
def _init_dataloader(self):
dataloader = \
create_dataloader(self._data_source['val'], imgsz=self._imgsz, batch_size=self._batch_size, stride=self._stride,
single_cls=self._single_cls, pad=self._pad, rect=self._rect, workers=self._workers)[0]
return dataloader
def __getitem__(self, item):
try:
batch_data = next(self._data_iter)
except StopIteration:
self._data_iter = iter(self._data_loader)
batch_data = next(self._data_iter)
im, target, path, shape = batch_data
im = im.float()
im /= 255
nb, _, height, width = im.shape
img = im.cpu().detach().numpy()
target = target.cpu().detach().numpy()
annotation = dict()
annotation['image_path'] = path
annotation['target'] = target
annotation['batch_size'] = nb
annotation['shape'] = shape
annotation['width'] = width
annotation['height'] = height
annotation['img'] = img
return (item, annotation), img
class COCOMetric(Metric):
""" Inherit from DataLoader function and implement for YOLOv5.
"""
def __init__(self, config):
super().__init__()
self._metric_dict = {"AP@0.5": [], "AP@0.5:0.95": []}
self._names = (*self._metric_dict,)
self._stats = []
self._last_stats = []
self._conf_thres = config.conf_thres
self._iou_thres = config.iou_thres
self._single_cls = config.single_cls
self._nc = config.nc
self._class_names = {idx: name for idx, name in enumerate(config.names)}
self._device = config.device
@property
def value(self):
""" Returns metric value for the last model output.
Both use AP@0.5 and AP@0.5:0.95
"""
mp, mr, map50, map = self._process_stats(self._last_stats)
return {self._names[0]: [map50], self._names[1]: [map]}
@property
def avg_value(self):
""" Returns metric value for all model outputs.
Both use AP@0.5 and AP@0.5:0.95
"""
mp, mr, map50, map = self._process_stats(self._stats)
return {self._names[0]: map50, self._names[1]: map}
def _process_stats(self, stats):
mp, mr, map50, map = 0.0, 0.0, 0.0, 0.0
stats = [np.concatenate(x, 0) for x in zip(*stats)]
if len(stats) and stats[0].any():
tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=False, save_dir=None, names=self._class_names)
ap50, ap = ap[:, 0], ap.mean(1)
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
np.bincount(stats[3].astype(np.int64), minlength=self._nc)
else:
torch.zeros(1)
return mp, mr, map50, map
def update(self, output, target):
""" Calculates and updates metric value
Contains postprocessing part from Ultralytics YOLOv5 project
:param output: model output
:param target: annotations
"""
annotation = target[0]["target"]
width = target[0]["width"]
height = target[0]["height"]
shapes = target[0]["shape"]
paths = target[0]["image_path"]
im = target[0]["img"]
iouv = torch.linspace(0.5, 0.95, 10).to(self._device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
seen = 0
stats = []
# NMS
annotation = torch.Tensor(annotation)
annotation[:, 2:] *= torch.Tensor([width, height, width, height]).to(self._device) # to pixels
lb = []
out = output[0]
out = torch.Tensor(out).to(self._device)
out = non_max_suppression(out, self._conf_thres, self._iou_thres, labels=lb,
multi_label=True, agnostic=self._single_cls)
# Metrics
for si, pred in enumerate(out):
labels = annotation[annotation[:, 0] == si, 1:]
nl = len(labels)
tcls = labels[:, 0].tolist() if nl else [] # target class
_, shape = Path(paths[si]), shapes[si][0]
seen += 1
if len(pred) == 0:
if nl:
stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
continue
# Predictions
if self._single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
else:
correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool)
stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls))
self._stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls))
self._last_stats = stats
def reset(self):
""" Resets metric """
self._metric_dict = {"AP@0.5": [], "AP@0.5:0.95": []}
self._last_stats = []
self._stats = []
def get_attributes(self):
"""
Returns a dictionary of metric attributes {metric_name: {attribute_name: value}}.
Required attributes: 'direction': 'higher-better' or 'higher-worse'
'type': metric type
"""
return {self._names[0]: {'direction': 'higher-better',
'type': 'AP@0.5'},
self._names[1]: {'direction': 'higher-better',
'type': 'AP@0.5:0.95'}}
def get_config(opt):
""" Set the configuration of the model, engine,
dataset, metric and quantization algorithm.
"""
config = dict()
data_yaml = check_yaml(f"{opt.data}")
data = check_dataset(data_yaml)
model_config = Dict({
"model_name": "last",
"model": os.path.join(opt.model_dir,f"{opt.model_dir.split('/')[-1].split('_')[0]}.xml"),
"weights": os.path.join(opt.model_dir,f"{opt.model_dir.split('/')[-1].split('_')[0]}.bin")
})
engine_config = Dict({
"device": "CPU",
"stat_requests_number": 8,
"eval_requests_number": 8
})
dataset_config = Dict({
"data_source": data,
"imgsz": 640,
"single_cls": True,
})
metric_config = Dict({
"conf_thres": 0.001,
"iou_thres": 0.65,
"single_cls": True,
"nc": 1, # if opt.single_cls else int(data['nc']),
"names": data["names"],
"device": "cpu"
})
algorithms = [
{
"name": "DefaultQuantization", # DefaultQuantization or AccuracyAwareQuantization
"params": {
"target_device": "CPU",
"preset": "mixed",
"stat_subset_size": 300
}
}
]
config["model"] = model_config
config["engine"] = engine_config
config["dataset"] = dataset_config
config["metric"] = metric_config
config["algorithms"] = algorithms
return config
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--model_dir', type=str, default='/mnt/bb/yc/yolov5_finals/runs/train/exp/weights/best_openvino_model', help='model path')
parser.add_argument('--data', type=str, default=ROOT / '../data/tiaozhansai.yaml', help='data path')
# parser.add_argument('--save_dir', type=str, default=ROOT / 'data/tiaozhansai.yaml', help='save path')
# parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
opt = parser.parse_args()
return opt
if __name__ == '__main__':
opt = parse_opt()
""" Download dataset and set config
"""
print("Run the POT. This will take few minutes...")
config = get_config(opt)
init_logger(level='INFO')
logger = get_logger(__name__)
save_path = opt.model_dir.replace(opt.model_dir.split('/')[-1],'int8_openvino_model')
# if not os.path.exists(save_path):os.makedirs(save_path)
save_dir = increment_path(Path(save_path), exist_ok=True) # increment run
save_dir.mkdir(parents=True, exist_ok=True) # make dir
#将原来openvino_model的yaml文件copy到量化后的openvino_model中
yaml_name_ori = opt.model_dir.split('/')[-1].split('_')[0]+'.yaml'
yaml_name_int8 = 'int8.yaml'
shutil.copy(os.path.join(opt.model_dir,yaml_name_ori),os.path.join(save_path,yaml_name_int8))
# Step 1: Load the model.
model = load_model(config["model"])
# Step 2: Initialize the data loader.
data_loader = YOLOv5DataLoader(config["dataset"])
# Step 3 (Optional. Required for AccuracyAwareQuantization): Initialize the metric.
metric = COCOMetric(config["metric"])
# Step 4: Initialize the engine for metric calculation and statistics collection.
engine = IEEngine(config=config["engine"], data_loader=data_loader, metric=metric)
# Step 5: Create a pipeline of compression algorithms.
pipeline = create_pipeline(config["algorithms"], engine)
metric_results = None
# Check the FP32 model accuracy.
metric_results_fp32 = pipeline.evaluate(model)
logger.info("FP32 model metric_results: {}".format(metric_results_fp32))
# Step 6: Execute the pipeline to calculate Min-Max value
compressed_model = pipeline.run(model)
# Step 7 (Optional): Compress model weights to quantized precision
# in order to reduce the size of final .bin file.
compress_model_weights(compressed_model)
# Step 8: Save the compressed model to the desired path.
optimized_save_dir = save_dir
# optimized_save_dir = Path(save_dir).joinpath("int8_openvino_model")
# save_name = config["model"]["model_name"]
save_name = 'int8'
save_model(compressed_model, Path(Path.cwd()).joinpath(optimized_save_dir), save_name)
# Step 9 (Optional): Evaluate the compressed model. Print the results.
metric_results_i8 = pipeline.evaluate(compressed_model)
logger.info("Save quantized model in {}".format(optimized_save_dir))
logger.info("Quantized INT8 model metric_results: {}".format(metric_results_i8))
import matplotlib.pyplot as plt
plt.style.use('seaborn-deep')
fp32_acc = np.array(list(metric_results_fp32.values()))
int8_acc = np.array(list(metric_results_i8.values()))
print(fp32_acc, int8_acc)
x_data = ("AP@0.5", "AP@0.5:0.95")
x_axis = np.arange(len(x_data))
fig = plt.figure()
fig.patch.set_facecolor('#FFFFFF')
fig.patch.set_alpha(0.7)
ax = fig.add_subplot(111)
plt.bar(x_axis - 0.2, fp32_acc, 0.3, label='FP32')
for i in range(0, len(x_axis)):
plt.text(i - 0.3, round(fp32_acc[i], 3) + 0.01, str(round(fp32_acc[i], 3)), fontweight="bold")
plt.bar(x_axis + 0.2, int8_acc, 0.3, label='INT8')
for i in range(0, len(x_axis)):
plt.text(i + 0.1, round(int8_acc[i], 3) + 0.01, str(round(int8_acc[i], 3)), fontweight="bold")
plt.xticks(x_axis, x_data)
plt.xlabel("Average Precision")
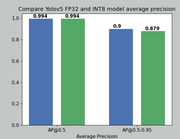
plt.title("Compare Yolov5 FP32 and INT8 model average precision")
plt.savefig(f"{save_dir}/result_int8.png")
plt.legend()
plt.show()
开始量化
python yolov5_pot_int8.py --model_dir best_openvino_model --data data/coco128.yaml
量化结果
在这里插入图片描述
使用yolov5检测效果
-
在进行推理的时候可以直接使用yolov5的detect.py,在选择权重路径的时候需要将xml文件的目录修改成xx_openvino_model,然后将该目录放入weight就行,例如:
parser.add_argument('--weights', nargs='+', type=str, default='/mnt/bb/yc/yolov5/runs/train/exp63/weights/last_openvino_model', help='model path or triton URL')
在运行时可能遇到这个情况:

需要将best_openvino中的.yaml文件copy到量化后的int8_openvino_model中,并重命名为int8.yaml,如果目录中已经有了int8.yaml则不用移动。
-
可以使用torch.hub.load加载模型并直接输出box.
import os
import cv2
import torch
class predict(object):
def __init__(self, **kwargs):
model_name = 'last.pt'
# self.model = torch.hub.load(os.getcwd(), 'custom',path='/mnt/bb/yc/yolov5/runs/train/exp64/weights/best_openvino_model/',source='local')
self.model = torch.hub.load(os.getcwd(), 'custom',path='/mnt/bb/yc/yolov5/runs/train/exp63/weights/last_openvino_model',source='local',force_reload=True)
# self.model = torch.hub.load(os.getcwd(), 'custom', source='local', path=model_name, force_reload=True)
def detect_image(self, image_path):
res = self.model(image_path).pandas().xyxy[0]
result = res[['ymin', 'xmin', 'ymax', 'xmax', 'confidence', 'class']].to_numpy()
return result
if __name__ == '__main__':
img_path = "img.jpg" # 输入图片的文件名
model = predict()
result = model.detect_image(img_path)
print(result)
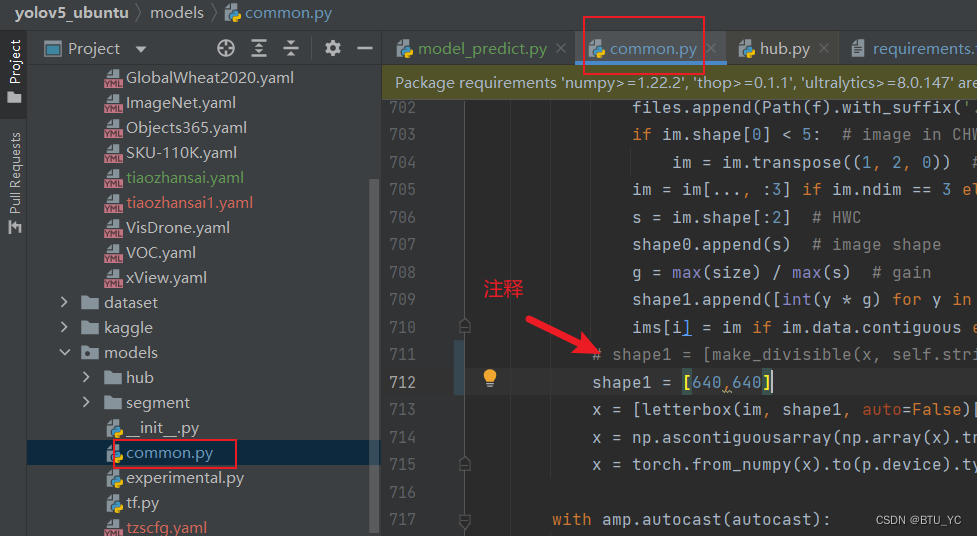
如果代码报了一下这个错误:
Can't set input blob with name: images, because model input (shape=[1,3,640,640]) and blob (shape=(1.3.448.640)) are incompatible
可以将yolov5中models路径下的common.py里的第700行左右的shape1修改成shape1=[640,640],重新运行。
一份test接口
test接口,提取码u5a8
其中的model_prodict.py的主要功能是加载一个yolov5剪枝后的模型,并对指定的图像进行目标检测,返回检测到的对象的边界框、置信度和类别索引。(如果不需要使用接口,这部分可以直接跳过。)















 4028
4028











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











