






 本文介绍了直流无刷电机的工作原理,包括KV值、极对数、FOC控制方法,以及DQ坐标系、帕克反变换和克拉克反变换的应用。还涉及SVPWM调制和CAN通信驱动电机的技术,如dgm电机和电调的控制命令。
本文介绍了直流无刷电机的工作原理,包括KV值、极对数、FOC控制方法,以及DQ坐标系、帕克反变换和克拉克反变换的应用。还涉及SVPWM调制和CAN通信驱动电机的技术,如dgm电机和电调的控制命令。
无刷电机简介
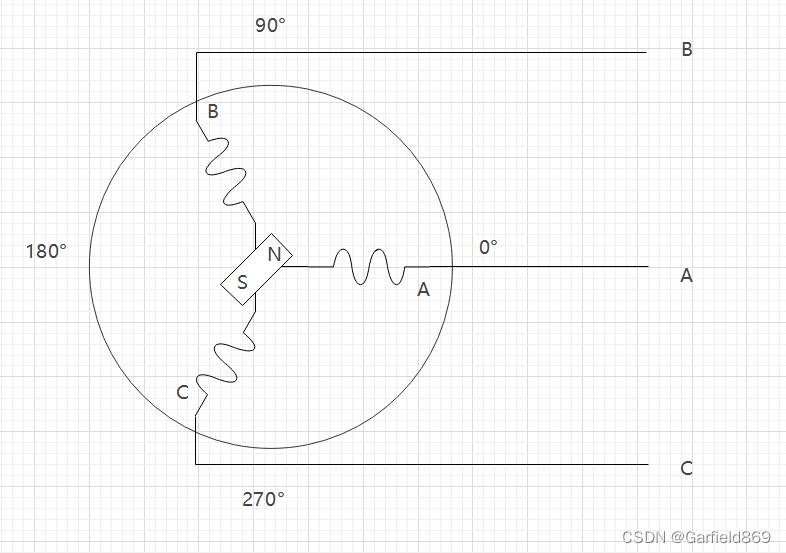
直流无刷电机可以抽象成上图模式,定子由三个线圈组成,转子由一对磁极组成。通过改变ABC的电流方向来改变定子产生的磁场方向,从而使磁铁转动起来
电机参数:
KV值:电机的转速(空载)=KV值×电压;例如KV1000的电机在10V电压下它的转速(空载)就是10000转/分钟。可以理解为电压每上升1V,电机增加的转速值。
极对数:三相无刷电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极对数就是极对数。电气角度 = 机械角度 * 极对数。
FOC简介
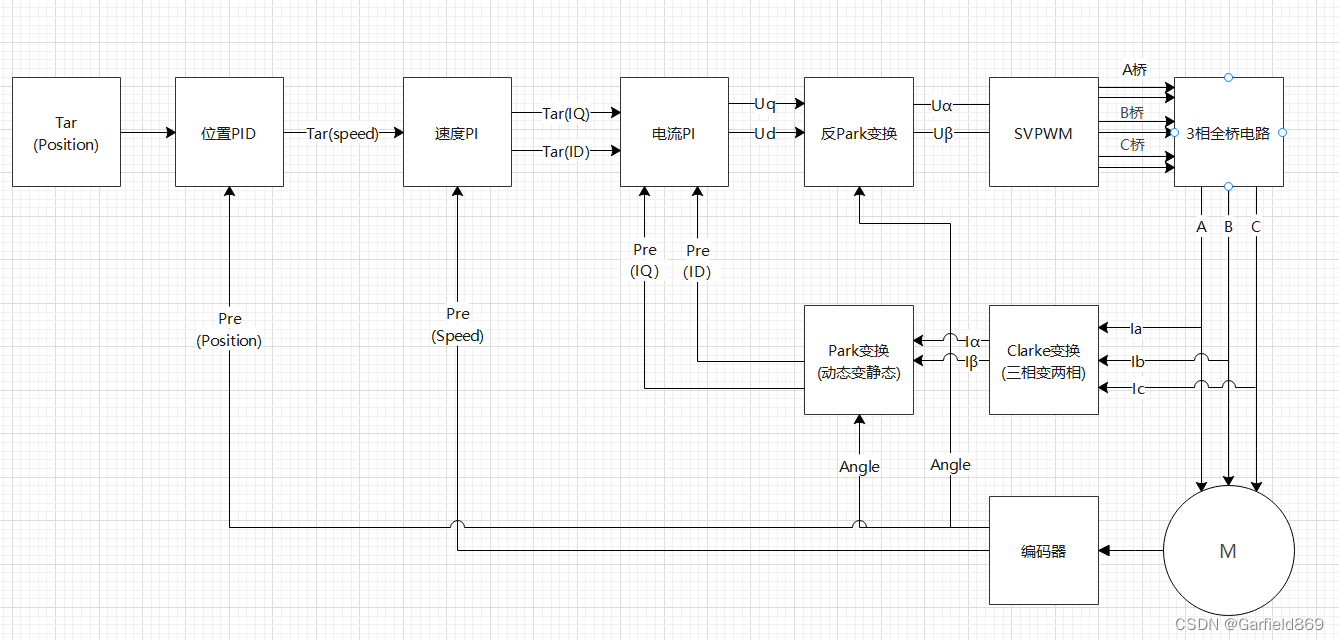
目标电流矢量是任意的,而三相绕组的方向是固定的,如何通过三相绕组电流的改变合成我们想要的任意大小和方向的目标电流矢量就是FOC(磁场定向矢量控制)要达成的目的。
DQ坐标系:
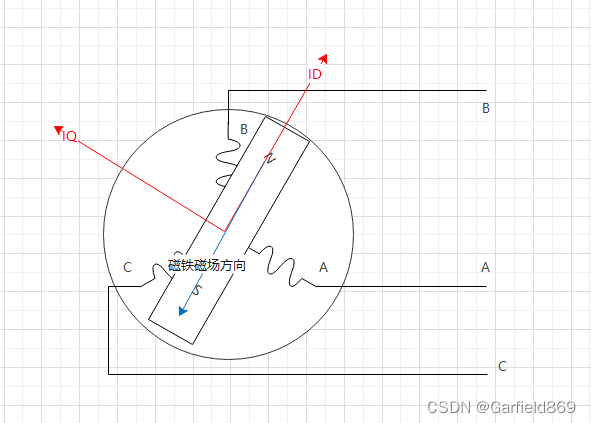
当三相绕组产生的磁场方向始终与转子磁铁相切的时候最为理想,这样相同电流下产生的旋转力量最大(图中IQ),当我们三相绕组产生的磁场方向与转子磁场方向反向平行时,这时候电机会被吸在原地不动(图中ID),电流都用来产生热量。因此我们以转子磁铁为参考,建立DQ坐标系,DQ坐标系随转子转动。
帕克反变换与αβ坐标系:
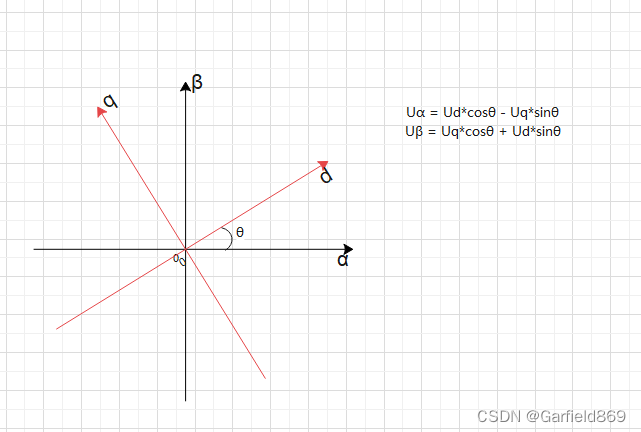
我们知道DQ坐标系是旋转坐标系,但我们的三相绕组是静止的,因此首要任务是将旋转坐标系变换为静止坐标系,即找到一个静止坐标系使其产生的磁场等同于DQ坐标系,我们将这个坐标系命名为αβ坐标系,其中由DQ 坐标系向αβ坐标系这一变换过程称为反Park变换。
克拉克反变换与abc三相坐标系:
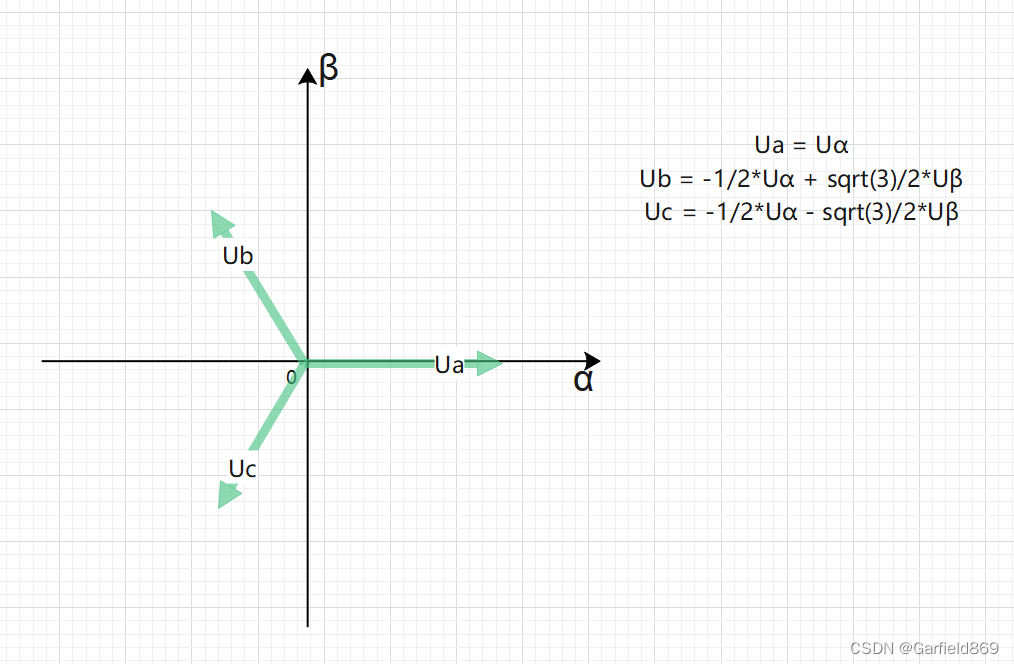
电机定子是ABC三个夹角为120°的绕组线圈,Clark反变换的目的是把两个垂直的坐标系转变为三相绕组坐标系。经过Clark反变换后就可以通过三相绕组去产生ID和IQ了。
SVPWM:
通过控制三相绕组电压输出引脚的PWM波占空比来控制三相电压值,来产生想要的ID和IQ值,这就是SVPWM波。
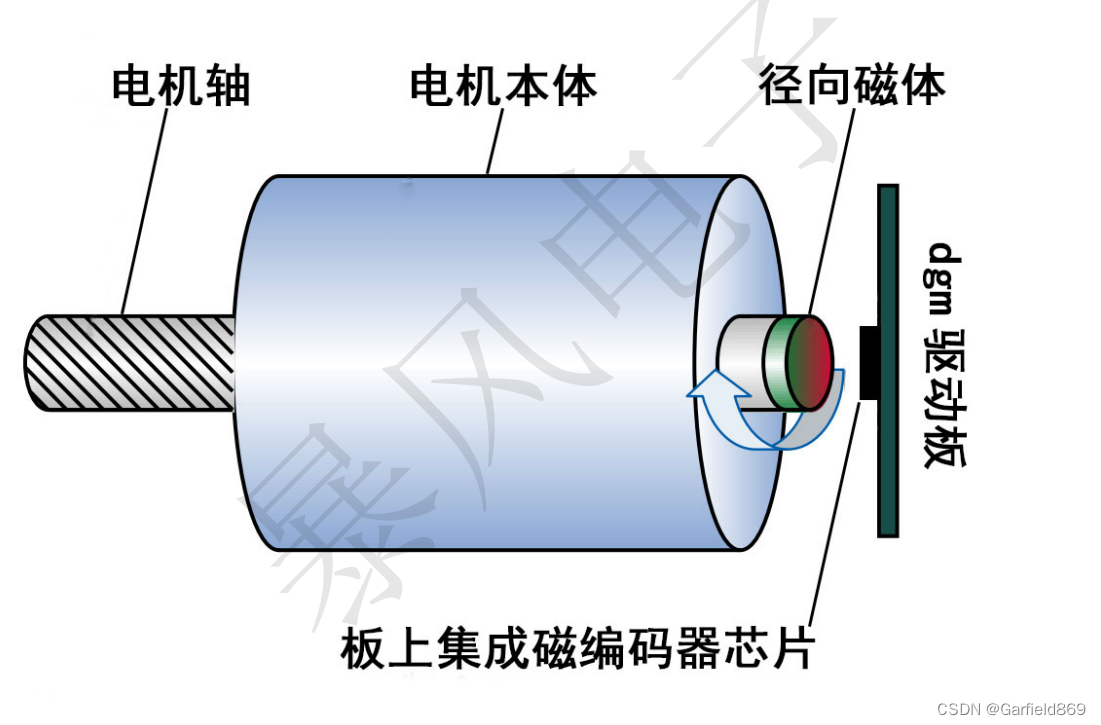
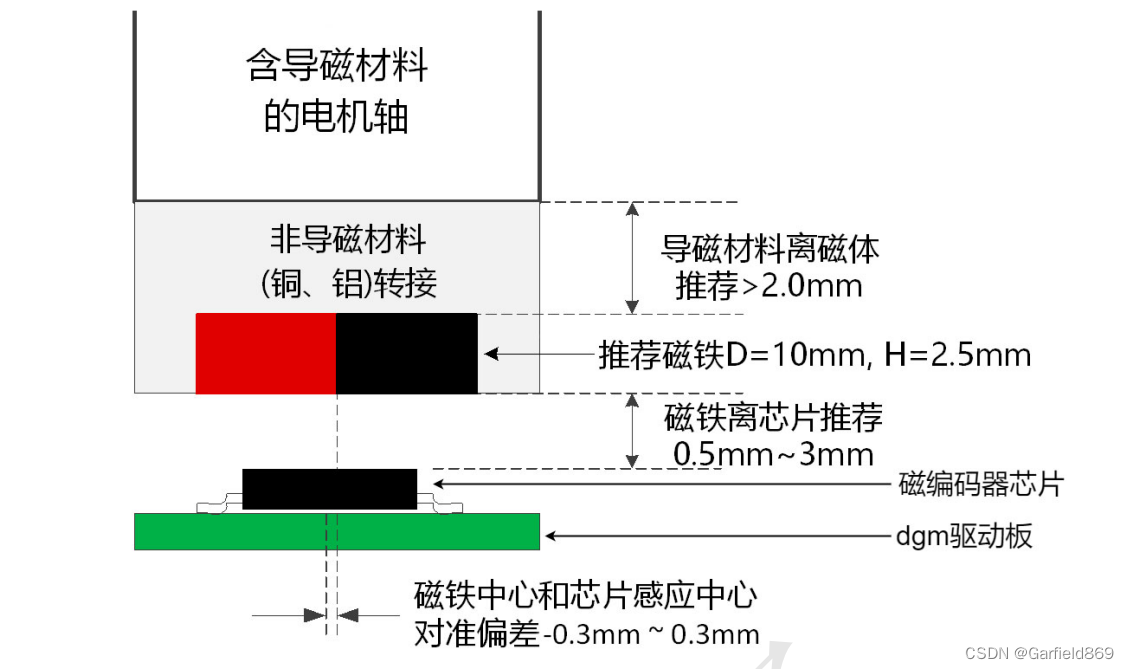
编码器安装介绍
dgm电机:
CAN通信驱动电机
使用can通信直接向电调发送数据帧就可以驱动电机。
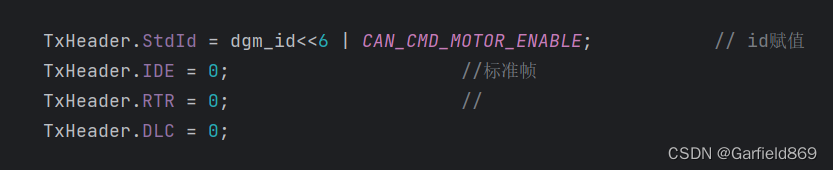
dgm电调:
StdId:第六位是命令索引,高位是dgm电调节点ID
CAN_CMD_MOTOR_ENABLE 启动电机,进入工作模式
函数体

CAN_CMD_SET_VELOCITY 设置电机目标转速

函数体
![]()
PS:函数循环里的Delay函数时间要用5ms,反正10ms不行


















 927
927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









