







实验要求
添加循迹模块,以及利用PWM实现循迹小车的平滑拐弯.
硬件接线
B-1A – PA0
B-1B – PB1
A-1A – PA1
A-1B – PB10
循迹模块(左) – PB3
循迹模块(右) – PB4
其余接线与上一篇博客一样.
cubemx配置
如图: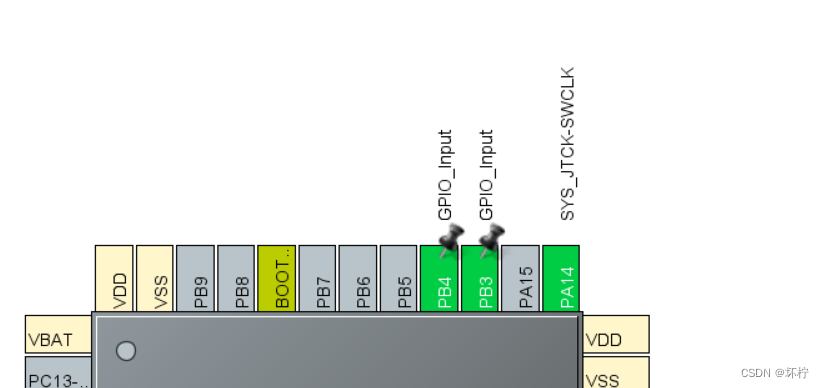
循迹模块(左) – PB3
循迹模块(右) – PB4
将他们配置成输入引脚.
实现原理
循迹模块的使用
以下为实物图:
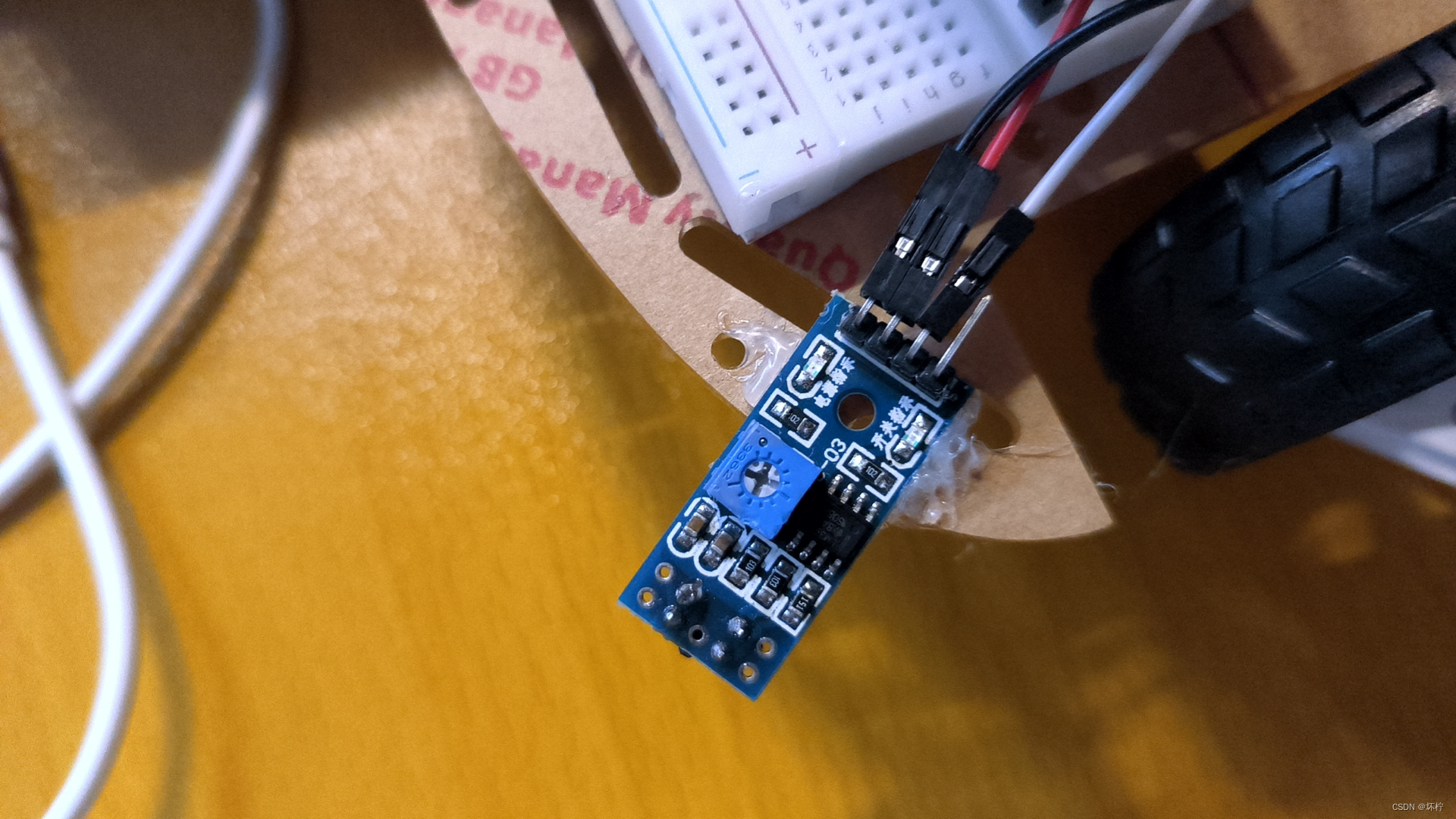
TCRT5000传感器的红外发射二极管不断发射红外线
当发射出的红外线没有被反射回来或被反射回来但强度不够大时,
红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,
此时模块的输出端为低电平,指示二极管被点亮
于是我们利用这个特性,通过不断检测这两个引脚的电平状态,实现判断是否冲出赛道
代码实现
if(LEFTWHEEL == GPIO_PIN_RESET && RIGHTWHEEL == GPIO_PIN_RESET)
{
//前进
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,200);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,200);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
if(LEFTWHEEL == GPIO_PIN_SET && RIGHTWHEEL == GPIO_PIN_RESET)
{
//左转
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,80);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,200);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
if(LEFTWHEEL == GPIO_PIN_RESET && RIGHTWHEEL == GPIO_PIN_SET)
{
//右进
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,200);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,80);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
if(LEFTWHEEL == GPIO_PIN_SET && RIGHTWHEEL == GPIO_PIN_SET)
{
//停止
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,0);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,0);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}















 959
959











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











