






首先需要确定你的树莓派需要用来干什么,如果不需要使用opencv库,直接去树莓派官网安装最新的镜像,Operating system images – Raspberry Pi
该镜像使用的Python3版本为3.9.2,因为使用的python版本太新,导致有opencv的部分依赖库无法匹配,因此慎重安装
如果需要使用opencv可以安装之前的版本,我使用的镜像的Python版本为3.7.3,可以正常使用opencv(模型已经成功跑起来了),镜像文件分享:
链接:https://pan.baidu.com/s/16zg3Vb86eOoi47lh5RXLLw?pwd=azea
提取码:azea
可以使用第三方烧录软件Raspberry Pi Imager
下载地址:https://www.raspberrypi.com/software/


这里选则操作系统时,可以选择烧录器自带的镜像,会自动下载轻量级系统,暂时不知道会少什么,使用的Python版本为3.9.2,该版本镜像未作深入了解。
选择之前下载好的镜像文件烧录,在设置中可以完成ssh服务、wifi设置,如果没有显示器,ssh与wifi的配置可以很方便的完成树莓派的连接,后面我会写一篇关于VNC远程连接的教程,可以在windows上显示树莓派桌面画面,同时可以完成文件传输,方便后面开发
username及密码 即为你的登录系统的用户名、密码,并且将作为后面ssh连接的账号与密码

烧录完成后windows将会弹出无法读取的提示,直接点击取消即可,点格式化将会把烧录好的系统删除。之后直接将SD卡插上树莓派开机即可。
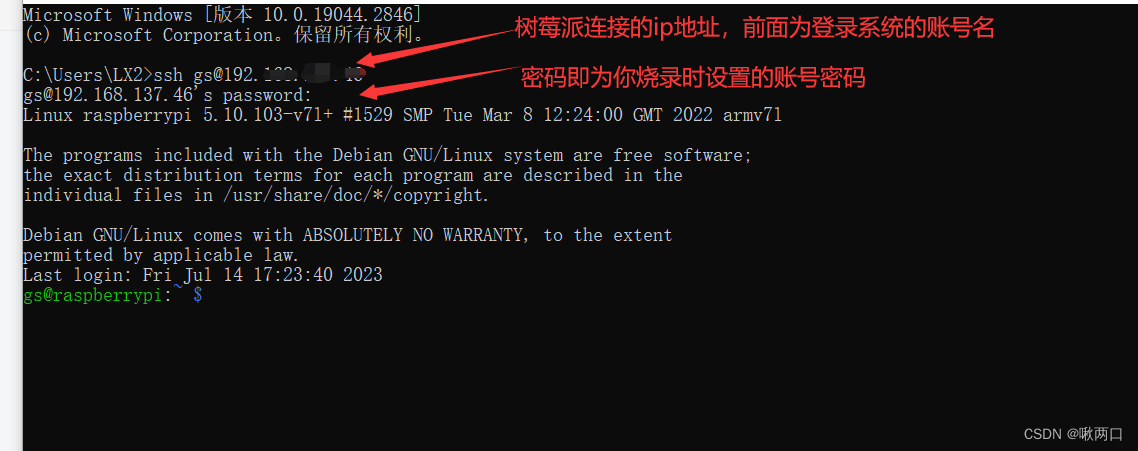
windows使用ssh登录
打开 命令行输入 ssh 用户名@ip地址
前提需要windows安装ssh
输入ssh可以查看是否安装ssh,返回如图所示即已经安装ssh
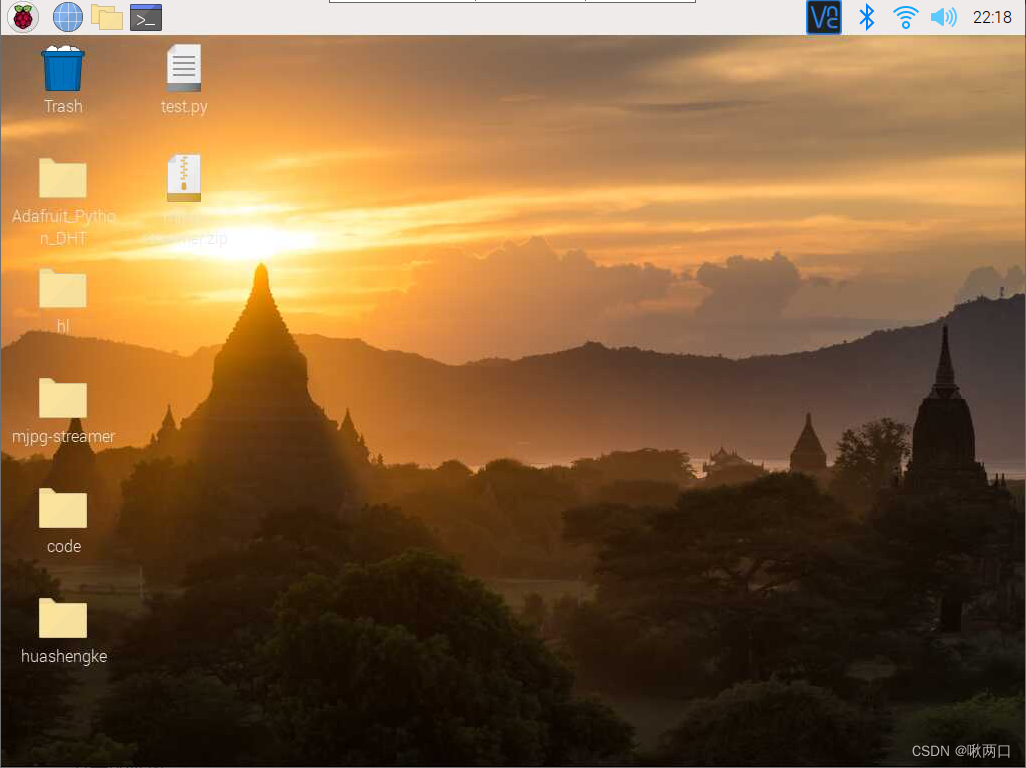
 VNC连接
VNC连接
使用软件:RealVNC Viewer
后面会进行详细的使用介绍以及软件分享
输入树莓派wifi连接的ip地址,输入用户名密码

















 900
900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









