







目录
上一篇:基于RT-Thread Studio+F4点亮一个LED http://t.csdn.cn/UNPGN
一、线程简介
RT-Thread是支持多任务的操作系统,多任务是通过多线程的方式实现。线程是任务的载体,是RTT中最基本的调度单位。线程在运行的时候,它自己会认为独占CPU运行。线程执行时的运行环境称为上下文,具体来说就是各个变量和数据,包括所有的寄存器变量、堆栈、内存信息等。
在 RT-Thread 中,线程是最基本的执行单元,每个线程都有一个独立的栈空间和优先级,并且可以独立运行、挂起、继续运行、退出等。线程的调度是 RT-Thread 实现多任务的关键。
二、线程管理的特点
-
支持多任务:RT-Thread可以同时运行多个任务,每个任务都有自己的线程栈和优先级,可以独立运行,互不干扰。
-
支持多线程同步和互斥:RT-Thread提供了多种同步和互斥机制,如信号量、互斥锁、条件变量等,可以保证多个线程之间的安全性和数据一致性。
-
支持优先级调度:RT-Thread采用优先级抢占式调度算法,可以根据线程的优先级来进行调度,保证高优先级线程得到更多的执行时间。
-
支持动态创建和删除线程:RT-Thread可以在运行时动态创建和删除线程,可以根据需要灵活地调整系统资源。
-
支持线程间消息传递:RT-Thread提供了消息队列、邮箱等机制,可以方便地进行线程间的消息传递和通信。
-
支持不同大小的线程栈:RT-Thread可以根据线程的需要分配不同大小的栈空间,可以灵活地适应不同的应用场景。
三、线程属性
线程栈:
· RT-Thread 线程具有独立的栈,当进行线程切换时,会将当前线程的上下文存在栈中,当线程要恢复运行时,再从栈中读取上下文信息,进行恢复。
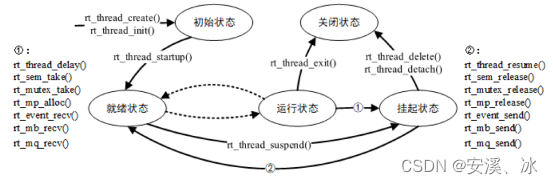
线程状态:

线程优先级:
RT-Thread 最大支持 256 个线程优先级 (0~255),数值越小的优先级越高,0 为最高优先级。在一些资源比较紧张的系统中,可以根据实际情况选择只支持 8 个或 32 个优先级的系统配置;对于 ARM Cortex-M系列,普遍采用 32 个优先级。最低优先级默认分配给空闲线程使用,用户一般不使用。在系统中,当有比当前线程优先级更高的线程就绪时,当前线程将立刻被换出,高优先级线程抢占处理器运行
线程状态间的切换:
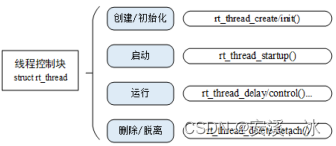
四、线程的相关操作
线程相关的操作包括:创建/初始化、启动、运行、删除/脱离。
动态线程与静态线程的区别是:动态线程是系统自动从动态内存堆上分配栈空间与线程句柄(初始化 heap 之后才能使用 create 创建动态线程),静态线程是由用户分配栈空间与线程句柄。
下一篇:RT-Theard动态和静态创建线程 http://t.csdn.cn/KRDWb















 2309
2309











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









