






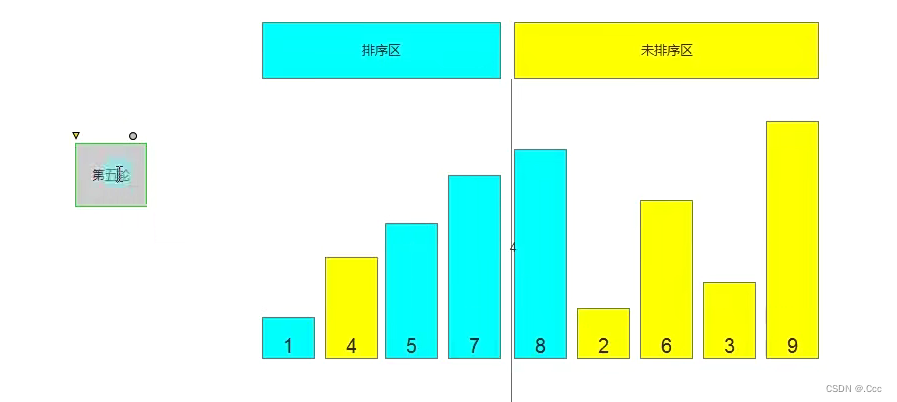
1.插入排序
两个区域 一个已排序区域和未排序区域,默认第一个元素是已排序区域,未排序的第一个元素和已排序的所有元素比较,已排序的元素大于这个第一个元素,已排序的元素就后移,未排序的就上去。
写法: 两个循环 一个for循环和while循环
两个变量 一个是已排序元素的索引值,一个是未排序元素的值
代码:
//插入排序
public void charuSort(int[]a)
{
//两层循环
for (int i = 1; i < a.Length; i++)
{
//排序区的最后一个索引
int sortIndex = i - 1;
//未排序的第一个值
int nosortValue = a[i];
while (sortIndex >= 0 && a[sortIndex] > nosortValue)
{
//这里是Index+1 和index 不是Inedx和Index-1 i会被赋值为-1
a[sortIndex + 1] = a[sortIndex];
sortIndex--;
}
a[sortIndex + 1] = nosortValue;
}
}2.希尔排序
基于插入排序,多了一个步长的概念,默认步长是长度/2,后面就是步长/2,根据步长把原序列分成多个子序列,对子序列进行插入排序。一轮操作了所有序列。
写法:就是插入排序,每次移动1单位改成移动一步长
代码:
//希尔排序
public void xierSort(int[] b)
{
//设置一个步长 根据步长来写
for (int step = b.Length/2; step>0; step=step/2)
{
for (int i = step; i < b.Length; i++)
{
int sortIndex = i - step;
int nosortValue = b[i];
while (sortIndex >= 0 && nosortValue < b[sortIndex])
{
b[sortIndex + step] = b[sortIndex];
sortIndex-=step;
}
b[sortIndex + step]= nosortValue;
}
}
for (int i = 0; i < b.Length; i++)
{
Console.WriteLine(b[i]);
}
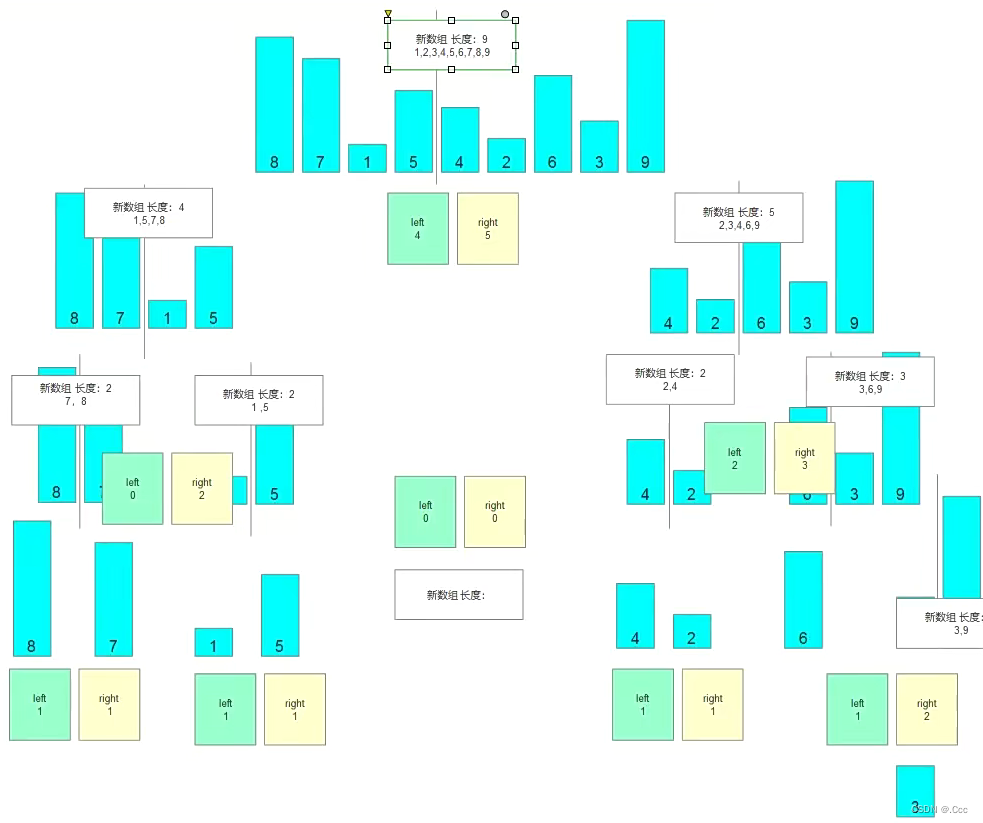
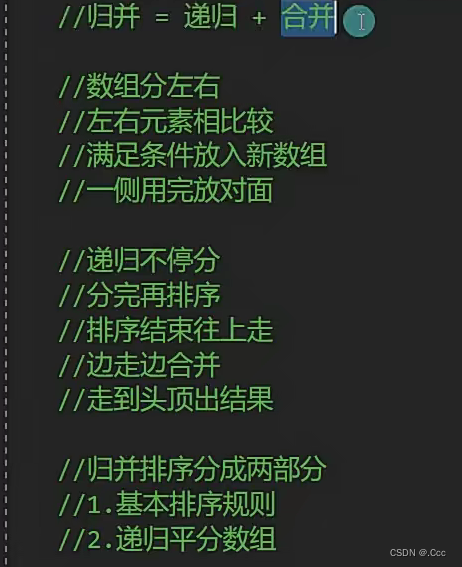
}3.归并排序
就是递归加合并。
写法:一个排序函数,一个平分函数,平分函数里返回排序函数。
//归并排序
public static int[] Sort(int[] left, int[] right)
{
//声明一个新数组存 左右比较后的元素
int[] resArray = new int[left.Length + right.Length];
int leftIndex = 0;
int rightIndex = 0;
//resArray要存满
for (int i = 0; i < resArray.Length; i++)
{
//如果左边数组索引大于等于数组长度了 说明左边比较完了
//这个时候右边就不用比较了 全部放入新数组中
if (leftIndex >= left.Length)
{
resArray[i] = right[rightIndex];
rightIndex++;
}
//与上述同理
else if (rightIndex >= right.Length)
{
resArray[i] = left[leftIndex];
leftIndex++;
}
//左边比右边大 右边进新数组
//右边索引+1
else if (left[leftIndex] > right[rightIndex])
{
resArray[i] = right[rightIndex];
rightIndex++;
}
//与上述同理
else
{
resArray[i] = left[leftIndex];
leftIndex++;
}
}
return resArray;
}
public static int[] guibingSort(int[] c)
{
//递归结束
//数组长度小于2 不能再分了
if (c.Length < 2)
{
return c;
}
int mid = c.Length / 2;
//声明左右数组
int[] leftArray = new int[mid];
int[] rightArray = new int[c.Length - mid];
//初始化左右数组
for (int i = 0; i < c.Length; i++)
{
if (i < mid)
{
leftArray[i] = c[i];
}
else
{
rightArray[i - mid] = c[i];
}
}
//这里返回排序函数
return Sort(guibingSort(leftArray), guibingSort(rightArray));
}
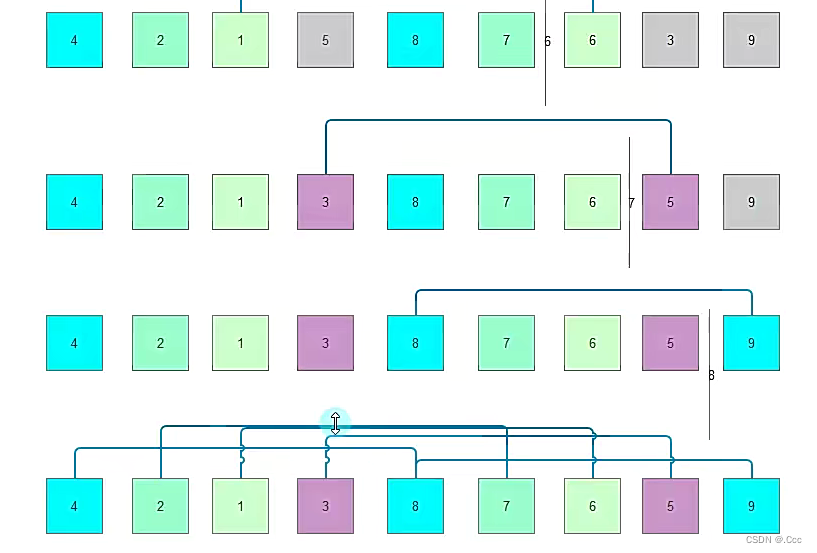
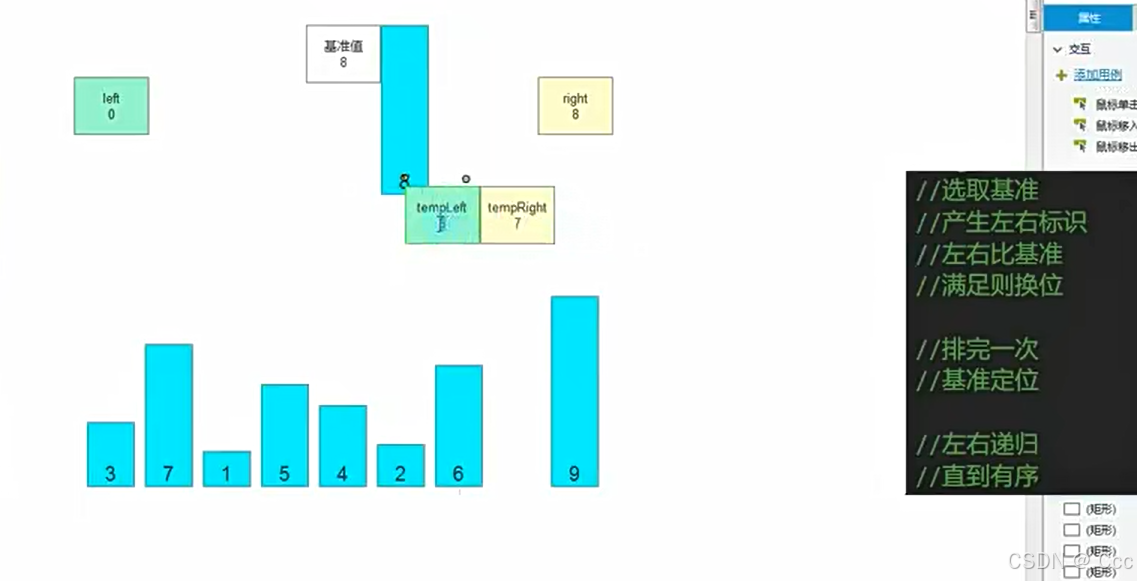
}4.快速排序
快排的优化:
类似归并排序 有递归 分数组
三个变量 分别是一个基准值 一个lefttmp 一个righttmp 三个while循环
//快速排序
public static void QuickSort(int[]d,int left,int right)
{
//递归出口
if(left >= right)
{
return;
}
int lefttmp, righttmp, temp;
temp = d[left];
lefttmp = left;
righttmp= right;
//lefttmp 、righttmp 这两个一直在变 所以条件是这两个
while (lefttmp != righttmp)
{
//从右边开始看 右边的值小于基准值就放到左边去
while (lefttmp < righttmp&& d[righttmp] > temp)
{
righttmp--;
}
//循环结束后就是满足条件的 交换
d[lefttmp] = d[righttmp];
//同理 上述
while ( lefttmp < righttmp&& d[lefttmp] < temp)
{
lefttmp++;
}
d[righttmp] = d[lefttmp];
}
d[lefttmp]=temp;
//下一轮
QuickSort(d,left,righttmp-1);
QuickSort(d, lefttmp+1, right);
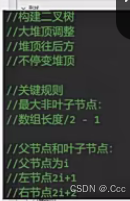
}5.堆排序
用数组建立起一个堆的概念,建立一个大顶堆(找最大的非叶子节点(length/2-1),然后和它的子节点(2*i+1,2*i+2)比较,最大的放顶(有放顶操作可能导致原来的父子节点顺序不对,需要再次比较))
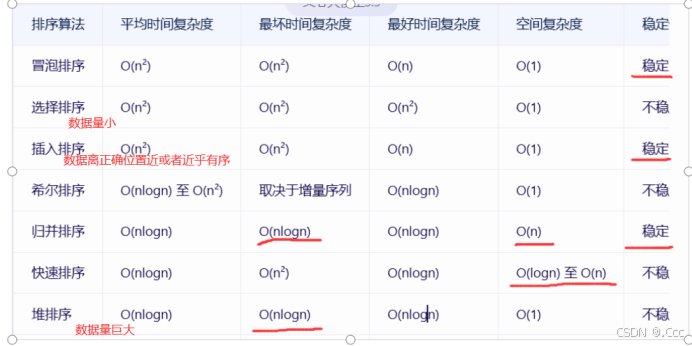
稳定性:相等元素排序后的相对顺序是否发生变化


















 6425
6425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









