






汉字点阵与OLED屏显
一.串口传输文件
1实验目的
将两台笔记本电脑,借助 usb转rs232 模块和杜邦线,建立起串口连接。然后用串口助手等工具软件(带文件传输功能)将一台笔记本上的一个大文件(图片、视频和压缩包软件)传输到另外一台电脑,预算文件大小、波特率和传输时间三者之间的关系,并对比实际传输时间。
实验准备
需要两台电脑,电脑上都下载好串口调试助手,方便接收和发送显示文件。两个串口线连接这两台电脑。打开串口调试助手,开始实验。
实验过程
1.打开串口调试助手,选择文件,设置波特率为115200,点击发送文件
 2.另一台电脑接收的文件,547KB 波特率115200时为70s
2.另一台电脑接收的文件,547KB 波特率115200时为70s

3.设置波特率为 2000000,发送文件,另一台电脑的接收文件,波特率为 2000000时为35s

找到保存的.dat文件,重命名为jdp
二.学习理解汉字的机内码、区位码编码规则和字形数据存储格式,将名字和学号叠加显示在此图片右下位置。
1理论学习
汉字的机内码、区位码编码规则和字形数据存储格式
(一)国标码(交换码)
1.简介
国标码
国标码是一个四位十六进制数,它将一个汉字用两个字节表示,每个字节只有7位,与ASCII码相似。
因此,必须将“区码”和“位码”分别加上32(十六进制为20H,后缀H表示十六进制),作为国标码。也就是说,国标码相当于将区位码向后偏移了32,以避免与ASCII字符中0~32的不可显示字符和空格字符相冲突。
2.举例
注意,
标码中是分别将区位码中的“区”和“位”各自加上32(20H)的,因为GB2312是DBCS双字节字符集,国标码属于双字节码,“区”和“位”各作为一个单独的字节。
“万”字的国标码十进制为:(45+32,82+32) = (77,114),
十六进制为:(4D,72H),
二进制为:(0100 1101,0111 0010)。
(二)汉字机内码
1.汉字机内码简介
机内码:为了避免ASCII码和国标码同时使用时产生二义性问题,大部分汉字系统都采用将国标码每个字节高位置1作为汉字机内码。这样既解决了汉字机内码与西文机内码之间的二义性,又使汉字机内码与国标码具有极简单的对应关系。

(三)汉字区位码
1.简介
区位码一个四位的十进制数,它将GB2312—80的全部字符集组成一个94×94的方阵,每一行称为一个“区”,编号为01~94;每一列称为一个“位”,编号为01~94,这样得到GB2312—80的区位图,用区位图的位置来表示的汉字编码,称为区位码。

2.GB2312字符集中区位码位置
(1)01~09区(682个):特殊符号、数字、英文字符、制表符等,包括拉丁字母、希腊字母、日文平假名及片假名字母、俄语西里尔字母等在内的682个全角字符;
(2)10~15区:空区,留待扩展;
(3)16~55区(3755个):常用汉字(也称一级汉字),按拼音排序;
(4)56~87区(3008个):非常用汉字(也称二级汉字),按部首/笔画排序;
(5)88~94区:空区,留待扩展。
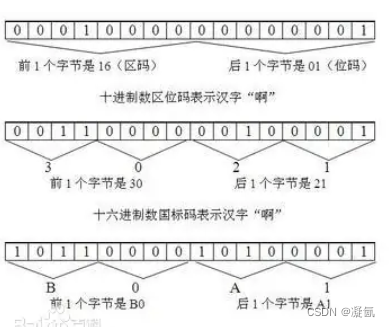
(四)汉字机内码、国标码和区位码三者关系
1.三者的关系
国标码 = 区位码 + 2020H;
机内码 = 国标码 + 8080H;

- 运算规则
(1)将区位码中的区码和位码分别转换为十六进制数;
(2)区位码的十六进制数+2020H = 国标码;
(3)国标码+8080H = 机内码


(五)汉字字形储存格式
- 点阵字库存储
在汉字的点阵字库中,每个字节的每个位都代表一个汉字的一个点,每个汉字都是由一个矩形的点阵组成,0代表没有,1代表有点,将0和1分别用不同颜色画出,就形成了一个汉字,常用的点阵矩阵有1212, 1414, 16*16三种字库。
字库根据字节所表示点的不同有分为横向矩阵和纵向矩阵,目前多数的字库都是横向矩阵的存储方式(用得最多的应该是早期UCDOS字库),纵向矩阵一般是因为有某些液晶是采用纵向扫描显示法,为了提高显示速度,于是便把字库矩阵做成纵向,省得在显示时还要做矩阵转换。我们接下去所描述的都是指横向矩阵字库。
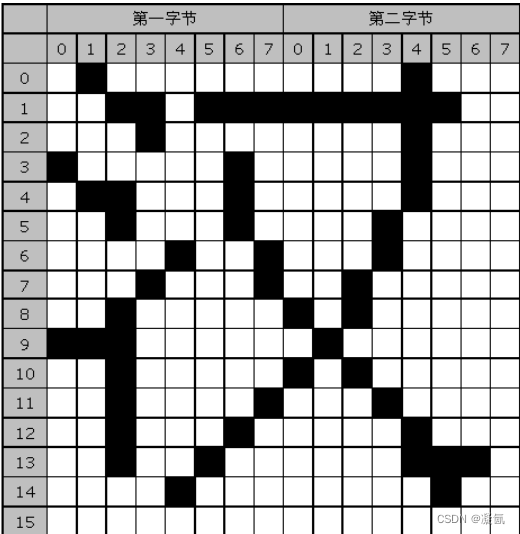
- 16*16点阵字库
对于1616的矩阵来说,它所需要的位数共是1616=256个位,每个字节为8位,因此,每个汉字都需要用256/8=32个字节来表示。
即每两个字节代表一行的16个点,共需要16行,显示汉字时,只需一次性读取32个字节,并将每两个字节为一行打印出来,即可形成一个汉字。
点阵结构如下图所示:
- 1414与1212点阵字库
对于1414和1212的字库,理论上计算,它们所需要的点阵分别为(1414/8)=25, (1212/8)=18个字节,但是,如果按这种方式来存储,那么取点阵和显示时,由于它们每一行都不是8的整位数,因此,就会涉到点阵的计算处理问题,会增加程序的复杂度,降低程序的效率。
为了解决这个问题,有些点阵字库会将1414和1212的字库按1614和1612来存储,即,每行还是按两个字节来存储,但是1414的字库,每两个字节的最后两位是没有使用,1212的字节,每两字节的最后4位是没有使用,这个根据不同的字库会有不同的处理方式,所以在使用字库时要注意这个问题,特别是14*14的字库。
4.汉字点阵获取
(1)利用区位码获取汉字
汉字点阵字库是根据区位码的顺序进行存储的,因此,我们可以根据区位来获取一个字库的点阵,它的计算公式如下:
点阵起始位置 = ((区码- 1)*94 + (位码 – 1)) * 汉字点阵字节数
获取点阵起始位置后,我们就可以从这个位置开始,读取出一个汉字的点阵。
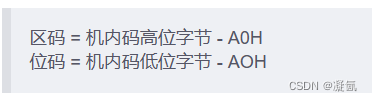
(2.) 利用汉字机内码获取汉字
前面我们己经讲过,汉字的区位码和机内码的关系如下:

反过来说,我们也可以根据机内码来获得区位码:
2工程实现
1.打开ubuntu新建文件夹用来存放代码、图片、24点阵.hz文件,ASCII码.zf文件
mkdir chinesetest
cd chinesetest
2.创建写入文件
vim test3.cpp

3.把以下代码写入,注意代码里的图片和文本路径要改为自己的文件的名字
#include<iostream>
#include<opencv/cv.h>
#include"opencv2/opencv.hpp"
#include<opencv/cxcore.h>
#include<opencv/highgui.h>
#include<math.h>
using namespace cv;
using namespace std;
void paint_chinese(Mat& image,int x_offset,int y_offset,unsigned long offset);
void paint_ascii(Mat& image,int x_offset,int y_offset,unsigned long offset);
void put_text_to_image(int x_offset,int y_offset,String image_path,char* logo_path);
int main(){
String image_path="/home/x-huxi/myhomework/chinesetest/yousee.png";
char* logo_path=(char*)"/home/x-huxi/myhomework/chinesetest/logo.txt";
put_text_to_image(20,300,image_path,logo_path);
return 0;
}
void paint_ascii(Mat& image,int x_offset,int y_offset,unsigned long offset){
//绘制的起点坐标
Point p;
p.x = x_offset;
p.y = y_offset;
//存放ascii字膜
char buff[16];
//打开ascii字库文件
FILE *ASCII;
if ((ASCII = fopen("/home/x-huxi/myhomework/chinesetest/Asci0816.zf", "rb")) == NULL){
printf("Can't open ascii.zf,Please check the path!");
//getch();
exit(0);
}
fseek(ASCII, offset, SEEK_SET);
fread(buff, 16, 1, ASCII);
int i, j;
Point p1 = p;
for (i = 0; i<16; i++) //十六个char
{
p.x = x_offset;
for (j = 0; j < 8; j++) //一个char八个bit
{
p1 = p;
if (buff[i] & (0x80 >> j)) /*测试当前位是否为1*/
{
/*
由于原本ascii字膜是8*16的,不够大,
所以原本的一个像素点用4个像素点替换,
替换后就有16*32个像素点
ps:感觉这样写代码多余了,但目前暂时只想到了这种方法
*/
circle(image, p1, 0, Scalar(0, 0, 255), -1);
p1.x++;
circle(image, p1, 0, Scalar(0, 0, 255), -1);
p1.y++;
circle(image, p1, 0, Scalar(0, 0, 255), -1);
p1.x--;
circle(image, p1, 0, Scalar(0, 0, 255), -1);
}
p.x+=2; //原来的一个像素点变为四个像素点,所以x和y都应该+2
}
p.y+=2;
}
}
void paint_chinese(Mat& image,int x_offset,int y_offset,unsigned long offset){//在图片上画汉字
Point p;
p.x=x_offset;
p.y=y_offset;
FILE *HZK;
char buff[72];//72个字节,用来存放汉字的
if((HZK=fopen("/home/x-huxi/myhomework/chinesetest/HZKs2424.hz","rb"))==NULL){
printf("Can't open HZKf2424.hz,Please check the path!");
exit(0);//退出
}
fseek(HZK, offset, SEEK_SET);/*将文件指针移动到偏移量的位置*/
fread(buff, 72, 1, HZK);/*从偏移量的位置读取72个字节,每个汉字占72个字节*/
bool mat[24][24];//定义一个新的矩阵存放转置后的文字字膜
int i,j,k;
for (i = 0; i<24; i++) /*24x24点阵汉字,一共有24行*/
{
for (j = 0; j<3; j++) /*横向有3个字节,循环判断每个字节的*/
for (k = 0; k<8; k++) /*每个字节有8位,循环判断每位是否为1*/
if (buff[i * 3 + j] & (0x80 >> k)) /*测试当前位是否为1*/
{
mat[j * 8 + k][i] = true; /*为1的存入新的字膜中*/
}
else {
mat[j * 8 + k][i] = false;
}
}
for (i = 0; i < 24; i++)
{
p.x = x_offset;
for (j = 0; j < 24; j++)
{
if (mat[i][j])
circle(image, p, 1, Scalar(255, 0, 0), -1); //写(替换)像素点
p.x++; //右移一个像素点
}
p.y++; //下移一个像素点
}
}
void put_text_to_image(int x_offset,int y_offset,String image_path,char* logo_path){//将汉字弄上图片
//x和y就是第一个字在图片上的起始坐标
//通过图片路径获取图片
Mat image=imread(image_path);
int length=18;//要打印的字符长度
unsigned char qh,wh;//定义区号,位号
unsigned long offset;//偏移量
unsigned char hexcode[30];//用于存放记事本读取的十六进制,记得要用无符号
FILE* file_logo;
if ((file_logo = fopen(logo_path, "rb")) == NULL){
printf("Can't open txtfile,Please check the path!");
//getch();
exit(0);
}
fseek(file_logo, 0, SEEK_SET);
fread(hexcode, length, 1, file_logo);
int x =x_offset,y = y_offset;//x,y:在图片上绘制文字的起始坐标
for(int m=0;m<length;){
if(hexcode[m]==0x23){
break;//读到#号时结束
}
else if(hexcode[m]>0xaf){
qh=hexcode[m]-0xaf;//使用的字库里是以汉字啊开头,而不是以汉字符号开头
wh=hexcode[m+1] - 0xa0;//计算位码
offset=(94*(qh-1)+(wh-1))*72L;
paint_chinese(image,x,y,offset);
/*
计算在汉字库中的偏移量
对于每个汉字,使用24*24的点阵来表示的
一行有三个字节,一共24行,所以需要72个字节来表示
如赵字
区位码是5352
十六进制位3534
机内码就是d5d4
d5-af=38(十进制),因为是从汉字啊开始的,所以减去的是af而不是a0,38+15等于53与区码相对应
d4-a0=52
*/
m=m+2;//一个汉字的机内码占两个字节,
x+=24;//一个汉字为24*24个像素点,由于是水平放置,所以是向右移动24个像素点
}
else{//当读取的字符为ASCII码时
wh=hexcode[m];
offset=wh*16l;//计算英文字符的偏移量
paint_ascii(image,x,y,offset);
m++;//英文字符在文件里表示只占一个字节,所以往后移一位就行了
x+=16;
}
}
cv::imshow("image", image);
cv::waitKey();
}
4.编译,很多人会报错因为没有安装pencv环境,自行安装环境
g++ test3.cpp -o test3 `pkg-config --cflags --libs opencv`
5.执行代码
./test3
6.结果

三.OLED屏显和汉字点阵编码
1.显示自己的学号和姓名,显示AHT20的温度和湿度
取模软件需要将中文进行取模得到中文
OLED_Font.h文件写入字模数组
0x00,0xF8,0x08,0x08,0x0C,0xCA,0x49,0x48,0x48,0xC8,0x08,0x08,0x08,0xF8,0x00,0x00},
{0x00,0xFF,0x00,0x00,0x00,0x1F,0x08,0x08,0x08,0x1F,0x00,0x40,0x80,0x7F,0x00,0x00},/*"向",0*/
{0x10,0x10,0xD0,0xFF,0x90,0x10,0x40,0x44,0x44,0x44,0x7F,0x44,0x44,0x44,0x40,0x00},
{0x04,0x03,0x00,0xFF,0x00,0x03,0x40,0x44,0x44,0x44,0x7F,0x44,0x44,0x44,0x40,0x00},/*"桂",1*/
{0x20,0x20,0x20,0xFF,0x20,0x20,0x20,0x10,0x4C,0x8B,0x08,0x08,0x08,0xF8,0x00,0x00},
{0x10,0x30,0x10,0x0F,0x08,0x08,0x00,0x10,0x10,0x09,0x44,0x82,0x40,0x3F,0x00,0x00},/*"均",2*/
{0x10,0x60,0x02,0x8C,0x00,0x00,0xFE,0x92,0x92,0x92,0x92,0x92,0xFE,0x00,0x00,0x00},
{0x04,0x04,0x7E,0x01,0x40,0x7E,0x42,0x42,0x7E,0x42,0x7E,0x42,0x42,0x7E,0x40,0x00},/*"温",3*/
{0x10,0x60,0x02,0x8C,0x00,0xFE,0x92,0x92,0x92,0x92,0x92,0x92,0xFE,0x00,0x00,0x00},
{0x04,0x04,0x7E,0x01,0x44,0x48,0x50,0x7F,0x40,0x40,0x7F,0x50,0x48,0x44,0x40,0x00},/*"湿",4*/
{0x00,0x00,0xFC,0x24,0x24,0x24,0xFC,0x25,0x26,0x24,0xFC,0x24,0x24,0x24,0x04,0x00},
{0x40,0x30,0x8F,0x80,0x84,0x4C,0x55,0x25,0x25,0x25,0x55,0x4C,0x80,0x80,0x80,0x00},/*"度",5*/
OLED.C文件中写入显示数字中文的函数
void OLED_ShowCN(uint8_t x,uint8_t y,uint8_t no)
{
uint8_t t,adder=0;
// OLED_Set_Pos(x,y);
OLED_SetCursor((x-1)*2,(y-1)*16);
for(t=0;t<16;t++)
{
OLED_WriteData(OLED_F10x16[2*no][t]);
adder+=1;
}
// OLED_Set_Pos(x,y+1);
OLED_SetCursor((x-1)*2+1,(y-1)*16);
for(t=0;t<16;t++)
{
OLED_WriteData(OLED_F10x16[2*no+1][t]);
adder+=1;
}
}
以及显示字符的函数
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
然后分别导入AHT20温度传感器的.c.h文件
#include "stm32f10x.h"
#include "AHT20-21_DEMO_V1_3.h"
void Delay_N10us(uint32_t t)//延时函数
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//延时函数
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //延时函数
{
while(t--)
{
SensorDelay_us(1000);//延时1ms
}
}
void AHT20_Clock_Init(void) //延时函数
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
}
void SDA_Pin_Output_High(void) //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_1);
}
void SDA_Pin_Output_Low(void) //将P15配置为输出 并设置为低电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_ResetBits(GPIOB,GPIO_Pin_1);
}
void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void SCL_Pin_Output_Low(void) //SCL输出低电平
{
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
}
void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平
{
GPIO_InitTypeDef GPIO_InitStruct;
AHT20_Clock_Init();
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_1);//输出高电平
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_0);//输出高电平
}
void I2C_Start(void) //I2C主机发送START信号
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)) a=1;
Byte = (Byte<<1)|a;
SCL_Pin_Output_Low();
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //看AHT20是否有回复ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //主机回复ACK信号
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //主机不回复ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //一条协议结束
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
void AHT20_SendAC(void) //向AHT20发送AC命令
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC采集命令
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC校验类型:CRC8/MAXIM
//多项式:X8+X5+X4+1
//Poly:0011 0001 0x31
//高位放到后面就变成 1000 1100 0x8c
//C现实代码:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//向AHT20发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_6th = AHT20_RD_Byte();//温度
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//用于CRC传递数组
AHT20_SendAC();//向AHT20发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC数据
Send_NOT_ACK(); //注意: 最后是发送NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
else
{
ct[0]=0x00;
ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改
}//CRC数据
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third,Byte_fourth;
I2C_Start();
AHT20_WR_Byte(0x70);//原来是0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//延时5ms左右
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);寄存器命令
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
//int32_t main(void)
//{
// uint32_t CT_data[2];
// volatile int c1,t1;
// /***********************************************************************************/
// /**///上电初始化SDA,SCL的IO口
// /***********************************************************************************/
// Init_I2C_Sensor_Port();
// /***********************************************************************************/
// /**///①刚上电,产品芯片内部就绪需要时间,延时100~500ms,建议500ms
// /***********************************************************************************/
// Delay_1ms(500);
// /***********************************************************************************/
// /**///②上电第一次发0x71读取状态字,判断状态字是否为0x18,如果不是0x18,进行寄存器初始化
// /***********************************************************************************/
// if((AHT20_Read_Status()&0x18)!=0x18)
// {
// AHT20_Start_Init(); //重新初始化寄存器
// Delay_1ms(10);
// }
//
// /***********************************************************************************/
// /**///③根据客户自己需求发测量命令读取温湿度数据,当前while(1)循环发测量命令读取温湿度数据,仅供参考
// /***********************************************************************************/
// while(1)
// {
// AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
// //AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据
//
// c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍)
// t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍)
// 下一步客户处理显示数据,
// /***********************************************************************************/
// /**///延时1.5s,建议间隔1.5s读一次
// /***********************************************************************************/
// delay_ms(1500);
// }
// }
#ifndef _AHT20_H_
#define _AHT20_H_
#include "stm32f10x.h"
void Delay_N10us(uint32_t t);//延时函数
void SensorDelay_us(uint32_t t);//延时函数
void Delay_4us(void); //延时函数
void Delay_5us(void); //延时函数
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //延时函数
void SDA_Pin_Output_High(void) ; //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
void SDA_Pin_Output_Low(void); //将P15配置为输出 并设置为低电平
void SDA_Pin_IN_FLOATING(void); //SDA配置为浮空输入
void SCL_Pin_Output_High(void); //SCL输出高电平,P14作为I2C的SCL
void SCL_Pin_Output_Low(void); //SCL输出低电平
void Init_I2C_Sensor_Port(void); //初始化I2C接口,输出为高电平
void I2C_Start(void); //I2C主机发送START信号
void AHT20_WR_Byte(uint8_t Byte); //往AHT20写一个字节
uint8_t AHT20_RD_Byte(void);//从AHT20读取一个字节
uint8_t Receive_ACK(void); //看AHT20是否有回复ACK
void Send_ACK(void) ; //主机回复ACK信号
void Send_NOT_ACK(void); //主机不回复ACK
void Stop_I2C(void); //一条协议结束
uint8_t AHT20_Read_Status(void);//读取AHT20的状态寄存器
void AHT20_SendAC(void); //向AHT20发送AC命令
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //没有CRC校验,直接读取AHT20的温度和湿度数据
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC校验后,读取AHT20的温度和湿度数据
void JH_Reset_REG(uint8_t addr);///重置寄存器
void AHT20_Start_Init(void);///上电初始化进入正常测量状态
#endif
主函数main.c部分如下
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AHT20-21_DEMO_V1_3.h"
#include <stdio.h>
int main(void)
{
Init_I2C_Sensor_Port();//初始化SDA,SCL的IO口的函数
uint32_t CT_data[2];
volatile int c1,t1;
Delay_1ms(500);
OLED_Init();//初始化OLED
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
OLED_ShowCN(1,1,0);
OLED_ShowCN(1,2,1);
OLED_ShowCN(1,3,2);
OLED_ShowString(2,1,"632007060523");
OLED_ShowCN(3,1,4);
OLED_ShowCN(3,2,5);
OLED_ShowString(3,6,":");
OLED_ShowCN(4,1,3);
OLED_ShowCN(4,2,5);
OLED_ShowString(4,6,":");
while(1)
{
//AHT20_Read_CTdata(CT_data);
AHT20_Read_CTdata_crc(CT_data);
while(CT_data[0]==0x00&&CT_data[1]==0x00)
{
AHT20_Read_CTdata_crc(CT_data);//crc校验后,读取AHT20的温度和湿度数据
}
c1 = CT_data[0]*100*10/1024/1024;
t1 = CT_data[1]*200*10/1024/1024-500;
下一步客户处理显示数据,我们这里用两个字符串来表示计算得到的值
char str1[5];
char str2[5];
sprintf(str1,"%.1f",c1/10.0);
sprintf(str2,"%.1f",t1/10.0);
OLED_ShowString(3,7,str1);
OLED_ShowString(4,7,str2);
Delay_1ms(2000);
}
}
结果展示

上下或左右的滑动显示长字符
输入字符定义任然如下,需要知道的是如何让其移动起来,可以用以下位定义
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
实现滚动代码如下
OLED_WriteCommand(0x2E); //关闭滚动
OLED_WriteCommand(0x26); //向右滚动,27则向左
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0x00); //起始页 这里为0
OLED_WriteCommand(0x07); //滚动速度
OLED_WriteCommand(0x07); //终止页 这里为3,也就是之后的姓名,学号
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0xFF); //虚拟字节
OLED_WriteCommand(0x2F); //开启滚动
结果展示
















 356
356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









