







论文名称 基于表示系数全变分的多时相遥感影像厚云快速去除
摘要
尽管厚云去除是一项复杂的任务,但过去几十年已经见证了基于张量补全技术的显著发展。尽管如此,它们需要大量的计算资源,并且可能遭受棋盘伪影。这项研究提出了一种新的技术来解决这个具有挑战性的任务使用表示系数全变分(RCTV),这强加了一个分解数据的全变分正则化。所提出的方法提高了去云性能,同时有效地保持了高速纹理。实验结果证实了我们的方法在恢复图像纹理的效率,证明了其优于现有技术的性能。
1.介绍
厚云去除[1],是遥感图像中普遍存在的挑战,严重影响信息提取的质量和准确性[2,3];虽然薄云去除可以通过图像去雾来解决[4],插值[5]或机器学习[6]算法,厚厚的云层提出了一个更复杂的问题,使得这些算法不够充分[7].在不同时间拍摄的同一场景的遥感图像可能为重建被厚云遮挡的像素提供补充信息。因此,有效地去除多时相遥感图像中的厚云是遥感图像处理的一个重要研究方向8,9,10].
消除多时相遥感图像中的厚云是一项艰巨的任务,近年来出现了各种方法。一种有希望的技术是将这个问题框架化为数据完成问题。在多时相厚云去除的情况下,给定c-频道图像ℎ×𝑤像素,𝒴∈ℝℎ×𝑤×𝑐×𝑡,捕获于t时间戳,𝒴被认为是部分观察到的数据,被厚云遮蔽的像素丢失。因此,索引集Ω收集观察到的像素(即未被云覆盖的像素)的索引。去除厚云的目的是通过填充由云引起的缺失值来估计潜在信号。
一些早期的方法(包括信息克隆[11,12],相似像素替换[13]和时空加权回归[14])取得了显著的发展。对间隙填充的研究,例如多时单偏振技术、多频和多偏振技术以及重复通过干涉测量技术,也为云的去除提供了有见地的想法(请参考[15]了解更多详情)。最近,一种流行的方法是利用遥感图像时间序列中固有的低秩结构,通过张量补全技术可以有效地利用这种结构。例如,刘等人[16,17]为一般张量补全问题引入了核范数之和(SNN ),后来在多时相图像厚云去除中得到广泛采用。SNN包括计算施加在矩阵上的核范数的加权和,该矩阵通过沿着每个模式展开原始张量而获得。这种方法产生一个凸优化问题,可以使用ADMM算法有效地解决。在众多研究中,这种算法被称为高精度低秩张量补全(HaLRTC)。实验结果表明了HaLRTC去除厚云的有效性;然而,它可能并不擅长重建关键细节。
继SNN之后,张量核范数(TNN) [18,19,20]就是典型的变种之一。与SNN不同,TNN是基于张量奇异值分解(tSVD)来表述的,从而得到张量补全问题的精确恢复理论。请注意,tSVD需要一个可逆变换,在早期的研究中,它通常被设置为傅立叶变换或离散余弦变换。这种变换通常在张量补全中起着至关重要的作用。最近,研究表明紧小波框架(也称为小框架)[21,22]能更好地突出低秩属性,推导出的框架TNN (FTNN)在各种视觉数据补全任务中更有前途23].
除了更好地建模低秩先验,结合其他先验知识是提高性能的另一种方式。纪等[24]试图通过在空间域中引入非局部相关性来增强HaLRTC。这是通过在一个大的搜索窗口内搜索和分组相似的图像块来实现的,从而促进了所构建的高阶张量的低秩性。这可能有助于底层模式的重建。大量实验表明,非局部先验将显著提高合成和真实世界时间序列数据的性能。陈等[25]框架云去除作为稳健的主成分分析问题,其中遥感图像的干净时间序列表示低秩分量,厚云/阴影被认为是稀疏噪声。观察厚云/阴影的空间-光谱局部平滑度,他们引入了空间-光谱总变分正则化子。同样,段等人[26]提出了时间光滑性和稀疏性正则化张量优化。他们利用云和云阴影像素的稀疏性来增强张量的整体稀疏性,同时使用单向总变分正则化来确保不同方向的平滑性。类似地,Dao等人使用类似的想法将云建模为稀疏噪声,并成功地将烧伤疤痕检测算法应用于多云图像[27].
上述方法植根于张量核范数及其变体。一些研究人员还采用张量分解技术来模拟低秩。经典模型包括CP分解[28,29]和塔克因式分解[30].例如,何等人[31提出了时间序列遥感图像的张量环分解,从不同的维度利用低秩属性。他们的模型结合了整体变化来提高空间的平滑度。林等[32]将每个时间节点的遥感图像分解为丰度张量和半正交基,对丰度张量的时间序列施加核范数。这沿着信道和时间维度分别对低秩属性建模。灵感来自[33],郑等[34]引入了一种新的因子分解框架,称为空间-光谱-时间(SST)连接张量网络分解,有效地探索了多时相图像中丰富的SST关系。该框架本质上是沿着图像在每个时间节点的谱模式进行子空间表示,并引入张量网络分解来表征四阶张量的内在关系。
除了矩阵/张量补全方法,机器学习和深度学习[35,36]也是典型的去云方式。例如,Singh和Komodakis提出了去云生成对抗网络(GAN)来学习多云图像和无云图像之间的映射[37].Ebel等人遵循周期一致GAN的架构,在合成孔径雷达图像的帮助下去除光学图像的云38].这些方法在培训阶段非常耗时,因此妨碍了从业者的快速探索。在下文中,我们关注矩阵/张量补全方法。
对最近进展的简要回顾表明,大多数现有方法需要包括额外的规范化[39]或构建更复杂的因子分解模型[34].这些方法不可避免地引入了相当大的计算开销,并导致超参数的增加。然而,尽管基于张量补全的方法能够实现良好的度量,但是已经观察到它们可能遭受棋盘伪影。因此,开发保持高性能的高效去云算法成为一个引人入胜的挑战。
为此,提出了一种表示系数全变分去云方法。核心概念包括将张量数据展开成矩阵格式,并执行矩阵分解以获得子空间表示。这里,表示系数有效地捕捉了原始张量数据的视觉上下文。为了增强细节重建,全变分被用于表示系数。这种方法应用于合成数据,产生快速处理和略优于最先进的方法的性能。真实数据上的实验结果表明,RCTVCR能有效地恢复出理想的纹理。
本文的重点可以简要概括如下:
-
本文证明了通过矩阵分解得到的代表系数具有稀疏梯度映射,从而提出了一种新的正则化方法——代表系数全变分(RCTV)。
-
结合RCTV和低秩矩阵分解,提出了一种新的多时相影像模型RCTVCR。
-
具有性能改进的RCTVCR比最先进的方法更快。例如,RCTVCR处理大小为的影像只需6秒512×512×3×7,而TNN和FTNN分别取126 s和1155 s。
本文的其余部分结构如下:第二节呈现RCTVCR。第三节报告了数值实验的结果。最后,第四节总结了这项研究的结果。该代码可从以下网址获得GitHub - shuangxu96/RCTVCR,2023年12月16日访问。
2.方法
2.1.准备工作和动机
首先,介绍了基于低秩矩阵分解的厚云去除问题,并给出了表示系数全变分的动机。
如前所述,多时相遥感影像由张量表示𝒴∈ℝℎ×𝑤×𝑐×𝑡,在哪里c表示通道的数量,t表示时间节点的数量,并且h和w分别对应于高度和宽度。我们将原始张量重塑成一个矩阵𝑌∈ℝℎ𝑤×𝑐𝑡。虽然中的每一列Y表示不同波段在不同时间节点的场景,它们本质上共享相似的视觉上下文和纹理。这一观察表明Y理论上是低秩矩阵。
图1用三个通道和四个时间节点对典型的多时相遥感影像进行三维可视化,命名为Munich。然后,通过手动应用不同的云遮罩来模拟多云图像,如所示图1根据线性代数理论,众所周知,如果奇异值迅速接近零,则矩阵的秩往往较低。无云和多云图像的奇异值曲线在中给出图1其中无云图像显示奇异值的快速衰减,而多云图像显示相反的结果。这意味着无云图像应该是一个低秩矩阵。

图一。 (a–d4个时间节点的无云慕尼黑数据集中的图像。(e–h)具有不同云掩膜的模拟多云慕尼黑数据集。(i)无云和多云图像的奇异值曲线。请注意,对于时间节点1到4,准确的时间戳是201501、201503、201504和201508,其中“XXXXYY”表示图像拍摄于XXXX年的YY月。
因此,厚云去除任务通常可以被公式化为低秩矩阵/张量完成问题,其中被云覆盖的像素被视为缺失像素。现有算法(如TNN)在低秩张量补全问题上表现出显著的性能。然而,它们是计算密集型的。为了开发更快的算法,本文重点研究了矩阵格式。探索矩阵数据低秩属性的最经典方法是低秩矩阵分解技术。给定一个预定义的整数r,恢复的无云数据可以表示为𝑋=𝑈𝑉⊤ [40],其中𝑈∈ℝℎ𝑤×𝑟表示表示系数和𝑉∈ℝ𝑐𝑡×𝑟表示子空间的基。请注意,通常假设𝑟<<部(ℎ𝑤,𝑐𝑡)这样一来𝑈𝑉⊤是r,导致低秩矩阵分解。对于不擅长低秩数据分析的读者来说,这个数学表达式可能是不可读的。事实上,这个公式𝑋=𝑈𝑉⊤可以认为是光谱解混[41],其中U表示丰度矩阵,V表示端元矩阵r表示端元的数量。
因为无云图像是不可访问的,X是一个需要估计的未知变量。为此,去云任务可以表述为:
![]()
在哪里Ω是一个索引集,收集所有未被云覆盖的像素。注意到𝒫Ω(·)是一个正交投影算子。换句话说,如果一个像素(𝑖,𝑗)未被云覆盖((𝑖,𝑗)∈Ω),投影会返回它的值;否则,投影将返回零。
在等式中(1),损失函数∥𝑋−𝑈𝑉⊤∥2𝐹鼓励恢复图像X低等级,和约束𝒫Ω(𝑋)=𝒫Ω(𝑌)强制恢复和观察的图像显示未被云覆盖的区域的相同像素值。这种优化通常通过ADMM算法来解决,其中关键步骤涉及实现奇异值分解(SVD ),计算复杂度为𝑂(ℎ𝑤𝑐2𝑡2).
等式中的模型(1)通常很快,但不足以恢复复杂的纹理。为了增强纹理质量,常见的策略是结合局部平滑度先验(即,相邻像素往往具有相似的值)。换句话说,总的变化是强加于X,导致以下问题:
![]()
这里,𝜆是一个超参数,总变差定义为:

在哪里𝒳∈ℝℎ×𝑤×𝑐×𝑡表示的张量版本X,以及𝐷ℎ和𝐷𝑤分别表示水平和垂直梯度算子。换句话说,𝐷ℎ𝒳和𝐷𝑤𝒳表示水平和垂直方向上两个相邻像素之间的差异。最小化TV正则化有助于相邻像素具有相似的值,潜在地导致更好的图像质量。众所周知,总变差最小化问题通常通过使用快速傅立叶变换(FFT)来解决,其计算复杂度为𝑂(ℎ𝑤𝑐𝑡原木(ℎ𝑤)) [42].然而,尽管总变差有显著的改善,但是高计算复杂度是不期望的。这促使研究人员探索快速、高性能的算法。
2.2.代表系数总变差
为了降低计算复杂度,本文提出了一种新的正则化研究。我们首先证明了表示系数U(丰度矩阵)在视觉上类似于图像。这个断言由第一行的图2,其中慕尼黑数据集分解为𝑟=5,产生五个系数。很明显,每个系数都传达了中描述的原始图像中的相似上下文图2。接下来,我们提出一个有趣的问题:这些系数表现出局部光滑性吗?为了解决这个问题,我们可视化的梯度强度图的第二行图2。像素的梯度强度(𝑖,𝑗)定义为:
![]()
其直方图显示在的第三行图2。该分析揭示了大多数像素的梯度强度接近零,这表明系数U是局部光滑的。

图二。 (a–e5)5个表示系数的可视化。(f–j)每个表示系数的梯度图。为了便于检查,渐变图的值被放大了2倍。(k–o)每个表示系数的直方图。
基于这一发现,本文引入了一种新的正则化子,表示系数全变分(RCTV),其特征在于以下定义:
∥𝑋∥RCTV=∥𝐷ℎ𝒰∥1+∥𝐷𝑤𝒰∥1,(5)
在哪里𝒰∈ℝℎ×𝑤×𝑟表示的张量对应项U。与等式(3),RCTV适用ℓ1-系数梯度的范数U而不是X。尽管电视和RCTV之间的差异似乎很小,但应该强调的是,这种差异并不小:
首先,RCTV最小化问题通过FFT解决,伴随着相对较低的计算复杂度𝑂(ℎ𝑤𝑟原木(ℎ𝑤))。这归因于这样的假设𝑟<<部(ℎ𝑤,𝑐𝑡)。当信道或时间节点的数量很大时,这个优点变得特别显著。更重要的是,当在约束条件下生成无云数据时𝒫Ω(𝑋)=𝒫Ω(𝑌)该算法本质上仅估计被云遮蔽的像素,如果它们没有云,则直接复制它们的值。当TV应用于整个数据集时[31,43],对于无云像素过度消耗计算资源。然而,RCTV在一定程度上缓解了这个问题,因为它是强加于表示系数的。
其次,最终得到的数据是通过以下各项的乘积重建的U和𝑉T,这可能会在不同的通道和时间节点之间保持梯度图的一致性。也就是说,不同的通道和时间节点将呈现相似的纹理和结构,因此RCTV可以更有效地利用来自其他通道和时间节点的信息。然而,TV仅在每个时间节点在单个通道内使用局部平滑度。在这方面,RCTV似乎更有希望从不同的通道和时间节点提取额外的纹理信息。
2.3.RCTV正则化去云
随后,RCTV正则化云去除(RCTVCR)模型被公式化为:
⎧⎩⎨部𝑈,𝑉,𝑋𝜏∑𝑖∈{ℎ,𝑤}∥𝐷𝑖𝒰∥1,s.t.𝑋=𝑈𝑉T,𝒫Ω(𝑋)=𝒫Ω(𝑌),𝑉T𝑉=𝐼.(6)
与等式相比(2),上面的等式最小化了RCTV而不是TV,并且它插入了一个约束𝑉T𝑉=𝐼为了稳定。
为了解决这个问题,两个辅助变量𝒢ℎ和𝒢𝑤被引入来解耦ℓ1-规范和𝐷𝑖𝒰(𝑖∈{ℎ,𝑤}),导致以下问题:
⎧⎩⎨部𝑈,𝑉,𝑋,𝒢𝑖𝜏∑𝑖∈{ℎ,𝑤}∥𝒢𝑖∥1,s.t.𝒢𝑖=𝐷𝑖𝒰,𝑋=𝑈𝑉T,𝒫Ω(𝑋)=𝒫Ω(𝑌),𝑉T𝑉=𝐼.(7)
采用ADMM算法求解该问题,旨在最小化上述问题的增广拉格朗日函数。也就是说,
⎧⎩⎨部𝑈,𝑉,𝑋,𝒢𝑖,𝑀,ℳ𝑖𝜏∑𝑖∈{ℎ,𝑤}∥𝒢𝑖∥1+𝜇2∥𝐷𝑖𝒰−𝒢𝑖+ℳ𝑖𝜇∥2𝐹+𝜇2∥𝑋−𝑈𝑉T+𝑀𝜇∥2𝐹,s.t.𝒫Ω(𝑋)=𝒫Ω(𝑌),𝑉T𝑉=𝐼.(8)
注意到ℳ𝑖和M是拉格朗日乘数,和𝜇是惩罚参数。然后我们交替更新每个变量。
更新𝒢𝑖:通过固定其他变量,我们专注于优化𝒢𝑖。相应的优化问题如下:
部𝒢𝑖𝜏∥𝒢𝑖∥1+𝜇2∥𝐷𝑖𝒰−𝒢𝑖+ℳ𝑖2∥2𝐹.(9)
解决方案由下式给出:
𝒢𝑖=𝚂𝜏/𝜇(𝐷𝑖𝒰+ℳ𝑖2),(10)
其中软阈值函数𝚂𝛾(𝑥)=符号(𝑥)最大(∣𝑥∣−𝛾,0).更新U这导致以下优化问题:
部𝑈𝜇2∥𝐷𝑖𝒰−𝒢𝑖+ℳ𝑖𝜇∥2𝐹+𝜇2∥𝑋−𝑈𝑉T+𝑀𝜇∥2𝐹.(11)
将该目标函数的导数设置为零产生最优解方程:
展开(𝜇𝐷T𝑖(𝐷𝑖𝒰−𝒢𝑖+ℳ𝑖𝜇))+𝜇(𝑈𝑉T−𝑋−𝑀𝜇)𝑉=0,(12)
在哪里𝐷T𝑖表示的转置运算符𝐷𝑖。简化后,等式变为:
展开(𝐷T𝑖𝐷𝑖𝒰)+𝑈=展开(𝐷T𝑖(𝒢𝑖−ℳ𝑖𝜇))+(𝑋+𝑀𝜇)𝑉,(13)
在哪里展开(·)表示展开操作。为了清楚起见,这个等式的右边用表示R。通过应用两端的FFT和卷积定理,可以导出闭合形式的解,如下所示44]:
 (14)
(14)
这里,ℱ(·)表示FFT,并且|·|2表示基于元素的平方运算。
更新V:优化问题涉及V被表述为:
部𝑉∥𝑋−𝑈𝑉⊤+𝑀𝜇∥2𝐹,s.t.𝑉⊤𝑉=𝐼.(15)
经过简单的计算,这个问题可以改写为:
部𝑉〈(𝑋+𝑀𝜇)⊤𝑈,𝑉〉,s.t.𝑉⊤𝑉=𝐼.(16)
参照提款[45],该解可以推导为:
⎧⎩⎨[𝐵,𝐷,𝐶]=德拉贡诺夫狙击步枪(Snayperskaya Vinyovka Dragunov的缩写)((𝑋+𝑀𝜇)⊤𝑈),𝑉=𝐵𝐶⊤.(17)
更新X问题是一个受约束的最小二乘任务:
部𝑋∥𝑋−𝑈𝑉⊤+𝑀𝜇∥2𝐹,s.t.𝒫Ω(𝑋)=𝒫Ω(𝑌).(18)
该解可以直接得到:
𝑋=𝒫Ω(𝑌)+𝒫Ω⊥(𝑈𝑉⊤−𝑀/𝜇).(19)
更新乘数:基于一般的ADMM原理,使用以下等式进一步更新乘数:
 (20)
(20)
最后,算法1总结了工作流程。

3.实验
为了评估RCTVCR算法的性能,在合成和真实数据集上进行了实验。峰值信噪比(PSNR)、结构相似性(SSIM)和光谱角度映射(SAM)用于评估目的。较高的PSNR和SSIM以及较低的SAM意味着图像质量较好。比较的方法包括HaLRTC [16,17],SNNTV [46],SPCTV [47],TNN [18,19]和FTNN [23].所有实验都是在运行Windows 10的台式机上进行的,配备了2.10 GHz的英特尔酷睿i7-12700F CPU和32 GB的内存。
3.1.合成数据集上的实验
在这一小节中,进行了一系列综合实验来评估RCTVCR的有效性。合成数据集包括具有三个通道和四个时间节点的慕尼黑,以及具有八个通道和四个时间节点的农田。图3展示了农田数据集中的影像。这些数据集包括256×256像素,是由地球资源卫星8号拍摄的。为了增强真实性,从WHU云数据集中选择了三个具有不同云量的真实云掩膜,如所示图4.
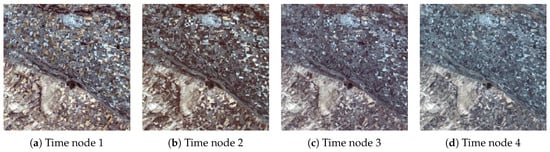
图3。农田数据集中的伪彩色图像。请注意,对于时间节点1至4,准确的时间戳是20130715、20130901、20131003和20131019,其中“XXXXYYZZ”表示图像拍摄于YYZZ日-XXXX年第月。
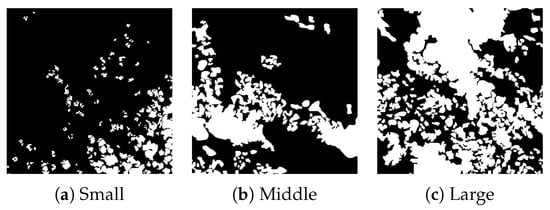
图4。三个不同大小的云面具。白色像素表示云。
表1总结了在Munich数据集上所有竞争方法在性能指标(PSNR、SSIM和处理时间)方面的性能比较。随着云掩膜大小从小到大的增加,所有方法的PSNR和SSIM值通常会减小。根据表中给出的结果,可以推断RCTVCR成为最佳方法,因为它在所有云掩膜尺寸上始终实现最高的PSNR和SSIM值,同时处理时间最短。
表1。慕尼黑数据集上的度量。最佳值用粗体标出。

表2显示了各种方法在农田数据集上的性能指标的对比分析。与Munich数据集相似,观察到一个一致的模式:随着云掩膜大小从小到大逐渐增大,所有方法的PSNR和SSIM值通常会减小。当将RCTVCR与SPCTV和TNN进行比较时,可以注意到,RCTVCR在大的云掩膜尺寸上表现出分别高0.35和0.44的PSNR值。此外,RCTVCR拥有最短的处理时间。处理大掩膜农田数据集仅需0.2 s,而SPCTV和TNN分别需要394.3 s和176.3 s。基于这些结果,可以得出结论,RCTVCR是最佳方法,始终达到最高的PSNR和SSIM值。
表二。农田数据集的度量。最佳值用粗体标出。

为了进一步强调我们的方法的优越性,我们在图5和图6。我们的方法有效地保留了复杂的细节,并产生了更具视觉吸引力的结果,而竞争对手的方法往往导致模糊或人工外观的伪像。应该注意的是,基于张量分解或张量核范数的比较方法表现出不同程度的棋盘伪影。然而,RCTVCR没有表现出这样的缺点。
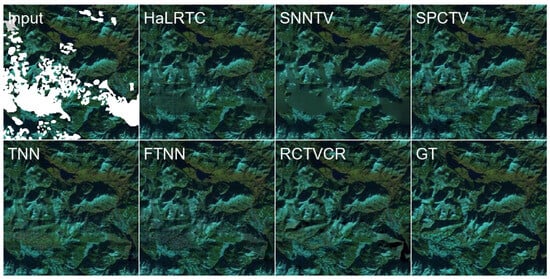
图5。所有比较方法的伪彩色去云图像使用具有中间云遮罩的慕尼黑数据集。
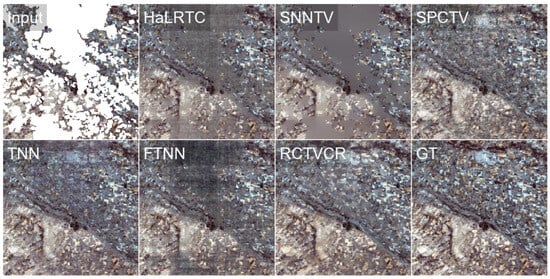
图6。所有比较方法在农田数据集上的假彩色去云图像具有大的云掩膜。
为了更好地说明RCTVCR的效率,散点图显示在图7对于带有中间云掩膜的农田数据集。结果表明,RCTVCR以最快的速度获得了最高的PSNR。TNN和SPCTV以很长的处理时间为代价获得了对HaLRTC的改进。FTNN是计算最密集的,但是它具有不令人满意的PSNR值。原因可能是FTNN更适合随机缺失的完成任务。尽管如此,云对应于连续区域缺失完成任务,这更具挑战性。
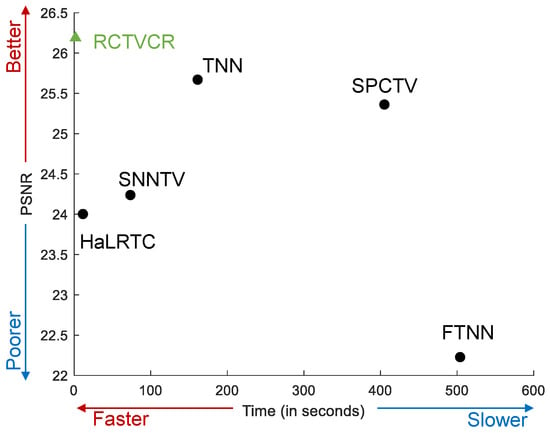
图7。具有中等云掩膜的农田数据集的PSNR和时间散点图。
总之,通过实验结果清楚地证明了我们的方法相对于现有技术的优越的视觉性能。通过有效地处理去云、结构保存和整体图像质量增强,我们提出的方法代表了该领域的一个进步。
3.2.真实数据集上的实验
这里,我们将竞争方法应用于真实世界的数据集,该数据集发布于[39].它是通过比利时梅赫伦上空的哨兵-2拍摄的。原始数据非常大,因此,大小为512×512被裁剪。有三个通道和七个时间节点,多云图像和相应的遮罩显示在图8。揭示了时间节点2、5和7被严重的云和阴影污染,这将是一个非常困难的任务。以往的研究往往选择云较少的部分时间节点来验证算法性能。在我们的研究中,所有的时间节点同时被用来测试算法对云覆盖量的鲁棒性。
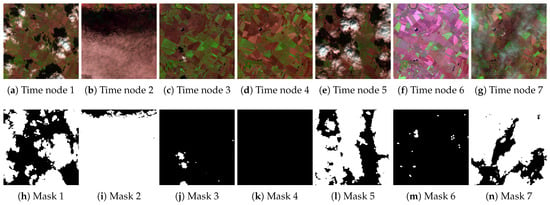
图8。真实数据集中的伪彩色图像及其遮罩。注意,对于时间节点1至7,准确的时间戳是20180816、20180831、20180905、20180915、20180925、20181015和20181020,其中“XXXXYYZZ”表示图像拍摄于XXXX年YY月ZZ日。
去云图像显示在图9。据观察,HaLRTC和SNNTV输出非常模糊的上下文。FTNN可以恢复更多的细节,但它不能准确地消除云和阴影。SPCTV和TNN显示出严重的棋盘效果和色彩失真。只有我们的方法忠实地恢复了大量的细节并保持了颜色的一致性。此外,中显示的条形图图10显示RCTVCR的处理时间为6 s,明显快于通常需要数百秒的其他方法。
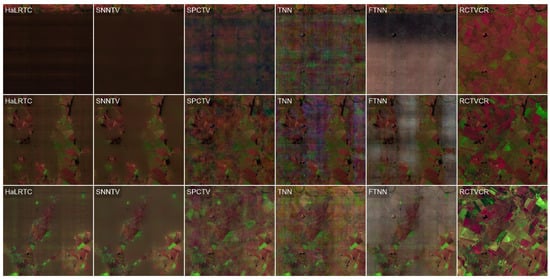
图9。真实数据集上所有比较方法的伪彩色去云图像。从上到下分别对应时间节点2、5、7。
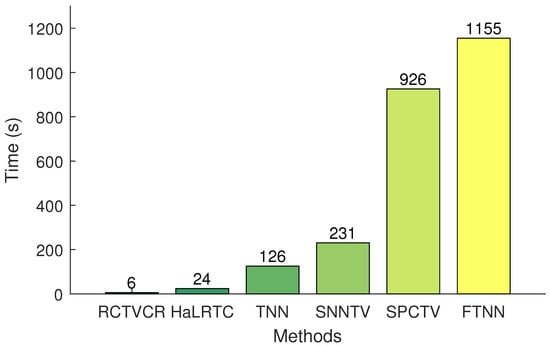
图10。大小为的真实世界数据的处理时间512×512×3×7.
4.讨论
4.1.时间数的影响
为了评估时间编号对我们的方法的重建效果的影响,我们进行了以下实验。我们使用中间遮罩保持慕尼黑数据集的多云图像,并逐渐添加参考图像以改变时间编号。表3使用具有不同时间编号的参考图像呈现去云图像的三个度量。数据表明,随着时间数的增长,图像质量也提高。然而,从表1结果表明,具有较小时间节点的RCTVCR仍优于现有的四时间节点方法,验证了RCTVCR的有效性。
表3。具有可变时间数的RCTVCR的慕尼黑数据集上的度量。

4.2.参数敏感性
在RCTVCR中,有两个参数,r和𝜏,需要调优。为了检查这些参数的影响,我们在具有中间云掩膜的农田数据集上实施了具有各种参数配置的RCTVCR。
最初,我们修复了𝜏在4×10−4多种多样r从十二岁到二十二岁。如所示图11a、PSNR曲线在逐渐下降之前迅速上升为r增加,在以下方面实现最佳性能𝑟=14. 图12显示使用获得的去云图像𝑟=12,14和22。很明显𝑟=14与相比,产生更好的细节𝑟=12。值得注意的是,𝑟=22保留体面的纹理,但显示颜色失真。
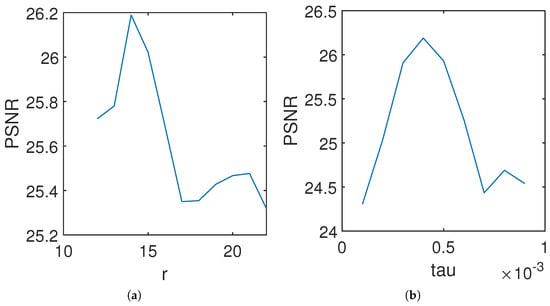
图11。具有不同超参数的度量。
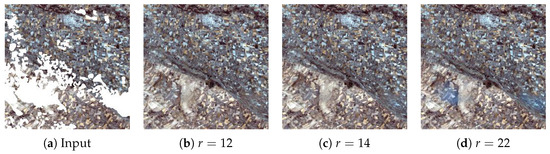
图12。去云图像𝜏=4×10−4与众不同r.
随后,我们修复了𝑟=14并进行调查𝜏值范围从1×10−4到9×10−4。如所示图11b,PSNR曲线在呈现下降趋势之前递增𝜏增加,在以下情况下产生最佳性能𝜏=4×10−4。模糊的图像𝜏=1×10−4, 4×10−4和9×10−4呈现在图13。应该注意的是𝜏控制RCTV正则化的强度。的小数值𝜏导致RCTVCR的行为与不采用局部平滑先验的方法(例如HaLRTC)相似。相反,大值𝜏导致相对模糊的图像。
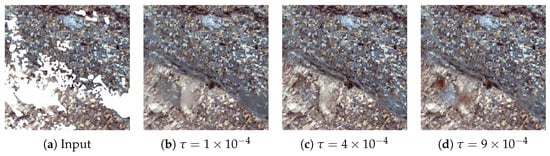
图13。去云图像𝑟=14与众不同𝜏价值观。
5.结论
总之,本文提出的遥感图像厚云去除方法提供了一种有效的解决方案。通过使用矩阵分解和正则化技术,该方法不仅去除了厚云,而且保留了图像中的纹理,从而提高了视觉质量。灵敏度分析以及与其他方法的比较进一步验证了该方法的优越性。这项研究有助于遥感图像处理的发展,在各个领域都有潜在的应用。可以进行进一步的研究来增强该方法在不同场景中的鲁棒性和适用性。由于目前我们的研究范围和硬件资源的限制,我们无法在现阶段将深度学习技术纳入我们的实验比较中。未来的工作包括探索将深度学习方法纳入我们研究的可能途径。
作者投稿
概念化公司;方法论,S.X软件,J.W .(王吉龙);验证,J.W .(王家林);形式分析,J.W .(王家林);写作—初稿准备,J.W .(王家林);写作——评论和编辑,S.X .可视化,J.W .(王继龙)。所有作者都阅读并同意手稿的出版版本。
提供资金
本研究得到了广西多源信息挖掘与安全重点实验室研究基金(批准号:MIMS22-16)、中央高校基础研究基金(批准号:D5000220060)、国家自然科学基金(批准号:12201497)、广东省基础与应用基础研究基金(批准号:2023A1515011358)和陕西省数理基础科学研究项目(批准号:22JSQ033)的资助。

















 3343
3343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









