






 文章介绍了A4950模块的特性,如高输出电流、低发热,以及如何使用STM32F103C8T6的定时器3进行PWM控制,以驱动A4950来控制电机的正反转和速度。通过提供初始化代码和电机控制函数,展示了如何设置PWM占空比来调整电机速度。
文章介绍了A4950模块的特性,如高输出电流、低发热,以及如何使用STM32F103C8T6的定时器3进行PWM控制,以驱动A4950来控制电机的正反转和速度。通过提供初始化代码和电机控制函数,展示了如何设置PWM占空比来调整电机速度。
1.基本介绍

A4950的峰值输出电流可达±3.5 A,工作电压为7.6~40v。
优点:相对于L298N模块控制2个电机正反转仅需要4个I/O口,体积小,发热低。
缺点:需要2个PWM引脚才能控制正反转,所以控制2个电机需要4PWM引脚,会使用STM32F103芯片一个定时器的全部PWM通道。
A4950模块是靠输入2路的PWM占空比的差值,来设定输出电压的大小,当差值为0时输出为0,反之当占空比差值为100时输出最大。
2.引脚功能和接线
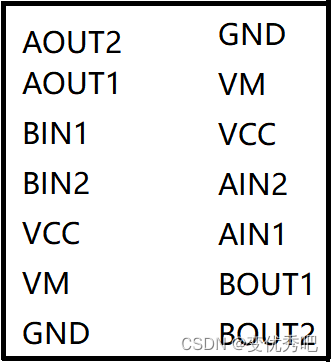
| 引脚名称 | 输入\输出 | 接线 | 功能 |
| AOUT1 | 输出 | 接A电机正 | 输出电压控制电机 |
| AOUT2 | 输出 | 接A电机负 | 输出电压控制电机 |
| BOUT1 | 输出 | 接B电机正 | 输出电压控制电机 |
| BOUT2 | 输出 | 接B电机负 | 输出电压控制电机 |
| AIN1 | 输入 | 接STM32 A7 | 控制电机输出电压 |
| AIN2 | 输入 | 接STM32 B1 | 控制电机输出电压 |
| BIN1 | 输入 | 接STM32 A6 | 控制电机输出电压 |
| BIN2 | 输入 | 接STM32 B0 | 控制电机输出电压 |
| VM | 输入 | 接12V电源 | 总电源 |
| VCC | 输入 | 接5V电源 | 给内部逻辑电路供电 |
| GND | 输出 | 接电源地 | 接地 |
3程序设计
接下来我使用STM32F103C8T6的标准库代码为例
定时器3初始化代码
#include "stm32f10x.h" // Device header
void PWM_Init3(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure1;
GPIO_InitStructure1.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure1.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStructure1.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure1);
GPIO_InitTypeDef GPIO_InitStructure2;
GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure2);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100-1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 3600-1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;//CCR
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_Cmd(TIM3,ENABLE);
}
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1 (TIM3,Compare);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2 (TIM3,Compare);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3 (TIM3,Compare);
}
void PWM_SetCompare4(uint16_t Compare)
{
TIM_SetCompare4 (TIM3,Compare);
}
电机控制函数
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Motor_Init(void)
{
PWM_Init3();
}
// you
void Motor_SetSpeed2(int16_t Speed)
{
PWM_SetCompare3(50-Speed/2);
PWM_SetCompare1(50+Speed/2);
}
//zuo
void Motor_SetSpeed1(int16_t Speed)
{
PWM_SetCompare2(50-Speed/2);
PWM_SetCompare4(50+Speed/2);
}
mian函数代码
#include "stm32f10x.h" // Device header
#include "Motor.h"
int main (void)
{
Motor_Init(); //电机驱动初始化
while(1)
{
Motor_SetSpeed1(20);//给电机1 向前20速度
Motor_SetSpeed2(20);//给电机2 向前20速度
}
}
 https://gitee.com/AD123zsg/electronic-game-code/tree/master/%E4%B8%BB%E6%8E%A7/C8T6/A4950
https://gitee.com/AD123zsg/electronic-game-code/tree/master/%E4%B8%BB%E6%8E%A7/C8T6/A4950
















 623
623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









