







STM32H7的启动过程分析
启动文件
不同编译器对应的启动文件不同,在MDK下,以
startup_stm32h743xx.s为例,这是一个汇编文件,启动文件中主要做了如下事情:
- 设置堆栈指针 SP = __initial_sp。
- 设置 PC 指针 = Reset_Handler。
- 设置中断向量表。
- 配置系统时钟。
- 配置外部 SRAM/SDRAM 用于程序变量等数据存储(这是可选的)。
- 跳转到 C 库中的 __main ,最终会调用用户程序的 main()函数。
Cortex-M 内核处理器复位后,处于线程模式,指令权限是特权级别(最高级别),堆栈设置为用主堆栈 MSP。
堆栈指针
通用寄存器组
Cortex – M7/M4/M3 处理器拥有 R0-R15 的通用寄存器组。其中 R13 作为堆栈指针 SP。 SP 有两个,但在同一时刻只能有一个可以用。
- 主堆栈指针(MSP):这是缺省的堆栈指针,它由 OS 内核、异常服务例程以及所有需要特权访问的应用程序代码来使用。
- 进程堆栈指针(PSP):用于常规的应用程序代码(不处于异常服务例程中时)。
另外以下两点要注意:- 大多数情况下的应用,只需使用指针 MSP,而 PSP 多用于 RTOS 中。
- R13 的最低两位被硬线连接到 0,并且总是读出 0,这意味着堆栈总是 4 字节对齐的。
Cortex-M7/M4/M3 向下生长的满栈
PUSH 入栈操作:SP 先自减 4,再存入新的数值
POP 出栈操作:先从 SP 指针处读出上一次被压入的值,再把 SP 指针自增 4
分析启动过程
硬件上电后,会触发硬件复位,复位之后,CPU 内的时序逻辑电路首先完成如下两个工作(程序代码下载到内部 flash 为例,flash首地址 0x0800 0000)
- 将 0x08000000 位置存放的堆栈栈顶地址存放到 SP 中(MSP)。
- 将 0x08000004 位置存放的向量地址装入 PC 程序计数器。
CPU 从 PC 寄存器指向的物理地址取出第 1 条指令开始执行程序,也就是开始执行复位中断服务程序 Reset_Handler。为啥,因为在启动文件中,最先做的两件事情是
- 设置堆栈指针 SP = __initial_sp
- 设置 PC 指针 = Reset_Handler
复位中断服务程序会调用SystemInit()函数来配置系统时钟、配置FMC总线上的外部SRAM/SDRAM,然后跳转到 C 库中__main函数。由 C 库中的__main函数完成用户程序的初始化工作(比如:变量赋初值等),最后由__main函数调用用户写的main()函数开始执行 C 程序。
代码分析
①、开辟栈(stack)空间,用于局部变量、函数调用、函数的参数等
//类似宏定义,这是个伪指令,定义栈大小,这里是以字节为单位
Stack_Size EQU 0x00001000
/*
开辟一段数据空间可读可写,段名 STACK,按照 8 字节对齐。 ARER 伪指令表示下面将开始定义一个代码段或者数据段。此处是定义数据段。 ARER 后面的关键字表示这个段的属性。
STACK :表示这个段的名字,可以任意命名。
NOINIT:表示此数据段不需要填入初始数据。
READWRITE:表示此段可读可写。
ALIGN=3 :表示首地址按照 2 的 3 次方对齐,也就是按照 8 字节对齐(地址对 8 求余数等于 0)。
*/
AREA STACK, NOINIT, READWRITE, ALIGN=3
//SPACE 这行指令告诉汇编器给 STACK 段分配 0x00001000 字节的连续内存空间。
Stack_Mem SPACE Stack_Size
/*
__initial_sp 紧接着 SPACE 语句放置,表示了栈顶地址。 __initial_sp 只是一个标号,标号主要用于表示一片内存空间的某个位置,等价于 C 语言中的“地址”概念。地址仅仅表示存储空间的一个位置,从 C 语言的角度来看,变量的地址,数组的地址或是函数的入口地址在本质上并无区别。
*/
__initial_sp
①、开辟堆(heap)空间,主要用于动态内存分配,也就是说用 malloc,calloc, realloc 等函数
分配的变量空间是在堆上
//定义堆空间大小
Heap_Size EQU 0x0000800
//分配一段名字为HEAP、可读可写、不需要初值、8字节对齐的数据空间
AREA HEAP, NOINIT, READWRITE, ALIGN=3
//__heap_base 表示堆的开始地址。
__heap_base
//SPACE 这行指令告诉汇编器给 HEAP段分配 0x0000800字节的连续内存空间。
Heap_Mem SPACE Heap_Size
__heap_limit 表示堆的结束地址
__heap_limit
③、生成属性设置、定义RESET代码段
//PRESERVE8 指定当前文件保持堆栈八字节对齐。
PRESERVE8
//THUMB 表示后面的指令是 THUMB 指令集 ,CM7 采用的是 THUMB - 2 指令集
THUMB
//:AREA 定义一块代码段,只读,段名字是 RESET。 READONLY 表示只读,缺省就表示代码段了。
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY
//3 行 EXPORT 语句将 3 个标号申明为可被外部引用, 主要提供给链接器用于连接库文件或其他文件。
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
④、中断向量变定义
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
/* 省略部分代码 */
DCD 0 ; Reserved
DCD WAKEUP_PIN_IRQHandler ; Interrupt for all 6 wake-up pins
__Vectors_End
//定义向量表大小
__Vectors_Size EQU __Vectors_End - __Vectors
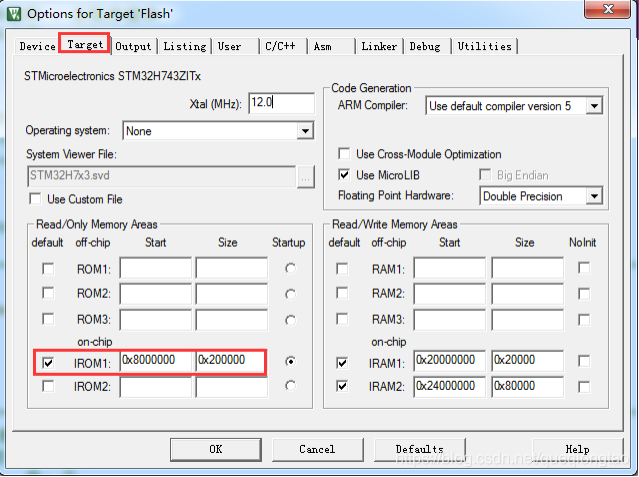
上面的这段代码是建立中断向量表,中断向量表定位在代码段的最前面。具体的物理地址由链接器的配置参数(IROM1 的地址)决定。如果程序在 Flash 运行,则中断向量表的起始地址是0x08000000。以 MDK 为例,就是如下配置选项:
DCD 表示分配 1 个 4 字节的空间。每行 DCD 都会生成一个 4 字节的二进制代码。中断向量表存放的实际上是中断服务程序的入口地址。当异常(也即是中断事件)发生时,CPU 的中断系统会将相应的入口地址赋值给 PC 程序计数器,之后就开始执行中断服务程序
⑤、代码段定义、Reset_Handler过程处理
AREA |.text|, CODE, READONLY
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT SystemInit
IMPORT __main
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
AREA 定义一块代码段,只读,段名字是 .text 。 READONLY 表示只读
利用 PROC、 ENDP 这一对伪指令把程序段分为若干个过程,使程序的结构加清晰。
WEAK 声明其他的同名标号优先于该标号被引用,就是说如果外面声明了的话会调用外面的。 这个声明很重要,它让我们可以在 C 文件中任意地方放置中断服务程序,只要保证 C 函数的名字和向量表中的名字一致即可。
IMPORT:伪指令用于通知编译器要使用的标号在其他的源文件中定义。但要在当前源文件中引用,而且无论当前源文件是否引用该标号,该标号均会被加入到当前源文件的符号表中。
SystemInit 函数在文件 system_stm32h7xx.c 里面,主要实现 RCC 相关寄存器复位和中断向量表位置设置。
__main标号表示 C/C++标准实时库函数里的一个初始化子程序__main的入口地址。该程序的一个主要作用是初始化堆栈(跳转__user_initial_stackheap标号进行初始化堆栈的,下面会讲到这个标号),并初始化映像文件,最后跳转到 C 程序中的 main 函数。这就解释了为何所有的 C 程序必须有一个 main 函数作为程序的起点。因为这是由 C/C++标准实时库所规,并且不能更改。
⑥、缺省中断服务函数定义
; Dummy Exception Handlers (infinite loops which can be modified)
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B . //死循环
ENDP
...省略
EXPORT PendSV_Handler [WEAK]
B .
ENDP
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
Default_Handler PROC
EXPORT WWDG_IRQHandler [WEAK]
EXPORT PVD_AVD_IRQHandler [WEAK]
...省略
EXPORT WAKEUP_PIN_IRQHandler [WEAK]
WWDG_IRQHandler
...省略
WAKEUP_PIN_IRQHandler
B .
ENDP
ALIGN
这里全部的中断服务函数都是用[WEAK]来声明,假如没有在其他文件中定义同名的中断服务函数,来了中断,就会进入到这里。
⑦、堆和栈的初始化
;*******************************************************************************
; User Stack and Heap initialization
;*******************************************************************************
//假如定义了MICROLIB,这里类似于if...else...
IF :DEF:__MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
//__user_initial_stackheap 将由__main 函数进行调用。
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END
Boot的启动模式
不同于以往的M3、M4内核的ST MCU,H7的boot引脚只有一个,但是H7 专门配套了两个 option bytes 选项字节配置,如此以来就可以方便设置各种存储器地址了。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9J2Qpbcf-1574601496448)(./1574512528932.png)]
BOOT_ADD0 和 BOOT_ADD1 对应 32 位地址到高 16 位,这点要特别注意。 通过这两个选项字节,所有 0x0000 0000 到 0x3FFF 0000 的存储器地址都可以设置,包括:
- 所有 Flash 地址空间。
- 所有 RAM 地址空间,ITCM,DTCM 和 SRAM。
设置了选项字节后,掉电不会丢失,下次上电或者复位后,会根据 BOOT 引脚状态从 BOOT_ADD0,或 BOOT_ADD1 所设置的地址进行启动。
使用 BOOT 功能,注意以下几个问题:- 如果用户不慎,设置的地址范围不在有效的存储器地址,那么 BOOT = 0 时,会从 Flash 首地址 0x08000000 启动,BOOT = 1 时,会从 ITCM 首地址 0x0000 0000 启动。
当 Flash 的保护级别被配置为级别 2 之后, 只能从 Flash 自举。 如果 BOOT_ADD0/BOOT_ADD1选项字节中自举地址被配置为位于存储器范围之外或属于 RAM 地址范围,则系统只能从地址 0x0800 0000 上的 Flash 开始执行














 329
329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









