






改进yolo11-fasternet-bifpn等200+全套创新点大全:航拍图草地杂草检测系统源码&数据集全套
1.图片效果展示



项目来源 人工智能促进会 2024.10.30
注意:由于项目一直在更新迭代,上面“1.图片效果展示”和“2.视频效果展示”展示的系统图片或者视频可能为老版本,新版本在老版本的基础上升级如下:(实际效果以升级的新版本为准)
(1)适配了YOLOV11的“目标检测”模型和“实例分割”模型,通过加载相应的权重(.pt)文件即可自适应加载模型。
(2)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别模式。
(3)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别结果保存导出,解决手动导出(容易卡顿出现爆内存)存在的问题,识别完自动保存结果并导出到tempDir中。
(4)支持Web前端系统中的标题、背景图等自定义修改。
另外本项目提供训练的数据集和训练教程,暂不提供权重文件(best.pt),需要您按照教程进行训练后实现图片演示和Web前端界面演示的效果。
2.视频效果展示
3.背景
研究背景与意义
随着农业现代化的不断推进,精准农业的理念逐渐深入人心。在这一背景下,草地杂草的检测与管理成为了提高农作物产量和质量的重要环节。传统的杂草检测方法依赖于人工观察和经验判断,不仅效率低下,而且容易受到主观因素的影响,导致检测结果的不准确。因此,开发一种高效、准确的草地杂草检测系统显得尤为重要。
近年来,深度学习技术的迅猛发展为目标检测领域带来了新的机遇。YOLO(You Only Look Once)系列模型因其实时性和高准确率而受到广泛关注。尤其是YOLOv11的出现,进一步提升了目标检测的性能,成为研究者们关注的焦点。通过对YOLOv11进行改进,可以更好地适应航拍图像中草地杂草的检测需求,从而提高检测的准确性和效率。
本研究将基于改进的YOLOv11模型,构建一个专门针对航拍图草地杂草的检测系统。数据集方面,我们将使用包含2500张图像的“grass weeds”数据集,其中涵盖了特定类别的杂草——ridderzuring。这一数据集的构建为模型的训练和验证提供了坚实的基础,确保了检测系统的实用性和可靠性。
通过本项目的实施,不仅可以为农民提供一种高效的杂草检测工具,帮助他们及时采取措施,减少杂草对农作物的影响,还可以为精准农业的发展提供有力的技术支持。此外,该系统的成功应用将为其他农业领域的智能化管理提供借鉴,推动农业科技的进一步发展。
4.数据集信息展示
4.1 本项目数据集详细数据(类别数&类别名)
nc: 1
names: [‘0 ridderzuring’]
该项目为【目标检测】数据集,请在【训练教程和Web端加载模型教程(第三步)】这一步的时候按照【目标检测】部分的教程来训练
4.2 本项目数据集信息介绍
本项目数据集信息介绍
本项目所使用的数据集名为“grass weeds”,旨在为改进YOLOv11的航拍图草地杂草检测系统提供高质量的训练数据。该数据集专注于草地中杂草的识别与分类,特别是针对“0 ridderzuring”这一特定杂草种类。数据集的设计考虑到了航拍图像的特性,包含了多种不同环境下的草地图像,以确保模型在多样化场景中的泛化能力。
“grass weeds”数据集包含丰富的图像样本,涵盖了不同光照条件、季节变化及生长状态下的“0 ridderzuring”杂草。这些图像经过精心标注,确保每一张图像中的杂草都能被准确识别。数据集的单一类别设计使得模型能够集中学习该杂草的特征,提升检测的准确性和效率。此外,数据集中的图像分辨率较高,能够提供清晰的细节信息,有助于YOLOv11模型在进行特征提取时获得更为丰富的上下文信息。
在数据集的构建过程中,特别注重样本的多样性与代表性,以模拟实际应用中可能遇到的各种情况。这种多样性不仅提高了模型的鲁棒性,还增强了其在真实环境中应用的潜力。通过对“grass weeds”数据集的深入分析与训练,期望能够显著提升YOLOv11在草地杂草检测任务中的表现,为农业管理与生态监测提供有效的技术支持。总之,本项目的数据集为研究人员和开发者提供了一个理想的平台,以推动草地杂草检测技术的进步与应用。





5.全套项目环境部署视频教程(零基础手把手教学)
5.1 所需软件PyCharm和Anaconda安装教程(第一步)
5.2 安装Python虚拟环境创建和依赖库安装视频教程(第二步)
6.改进YOLOv11训练教程和Web_UI前端加载模型教程(零基础手把手教学)
6.1 改进YOLOv11训练教程和Web_UI前端加载模型教程(第三步)
按照上面的训练视频教程链接加载项目提供的数据集,运行train.py即可开始训练
Epoch gpu_mem box obj cls labels img_size
1/200 20.8G 0.01576 0.01955 0.007536 22 1280: 100%|██████████| 849/849 [14:42<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:14<00:00, 2.87it/s]
all 3395 17314 0.994 0.957 0.0957 0.0843
Epoch gpu_mem box obj cls labels img_size
2/200 20.8G 0.01578 0.01923 0.007006 22 1280: 100%|██████████| 849/849 [14:44<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:12<00:00, 2.95it/s]
all 3395 17314 0.996 0.956 0.0957 0.0845
Epoch gpu_mem box obj cls labels img_size
3/200 20.8G 0.01561 0.0191 0.006895 27 1280: 100%|██████████| 849/849 [10:56<00:00, 1.29it/s]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|███████ | 187/213 [00:52<00:00, 4.04it/s]
all 3395 17314 0.996 0.957 0.0957 0.0845
项目数据集下载链接
7.原始YOLOv11算法讲解
YOLOv11是Ultralytics推出的YOLO系列最新版本,专为实现尖端的物体检测而设计。其架构和训练方法上进行了重大改进,使之不仅具备卓越的准确性和处理速度,还在计算效率上实现了一场革命。得益于其改进的主干和颈部架构,YOLOv11在特征提取和处理复杂任务时表现更加出色。在2024年9月27日,Ultralytics通过长达九小时的在线直播发布这一新作,展示了其在计算机视觉领域的革新。
YOLOv11通过精细的架构设计和优化训练流程,在保持高精度的同时,缩减了参数量,与YOLOv8m相比减少了22%的参数,使其在COCO数据集上的平均准确度(mAP)有所提升。这种效率的提高使YOLOv11非常适合部署在各种硬件环境中,包括边缘设备、云计算平台以及支持NVIDIA GPU的系统,确保在灵活性上的优势。
该模型支持广泛的任务,从对象检测、实例分割到图像分类、姿态估计和定向对象检测(OBB),几乎覆盖了计算机视觉的所有主要挑战。其创新的C3k2和C2PSA模块提升了网络深度和注意力机制的应用,提高了特征提取的效率和效果。同时,YOLOv11的改进网络结构也使之在复杂视觉任务上得以从容应对,成为各类计算机视觉任务的多功能选择。这些特性令YOLOv11在实施实时物体检测的各个领域中表现出众。
2024年9月27日,Ultralytics在线直播长达九小时,为YOLO11召开“发布会”
YOLO11 是 Ultralytics YOLO 系列实时物体检测器的最新版本,它以尖端的准确性、速度和效率重新定义了可能性。在之前 YOLO
版本的显著进步的基础上,YOLO11 在架构和训练方法方面进行了重大改进,使其成为各种计算机视觉任务的多功能选择。

YOLO11主要特点:
- 增强的特征提取:YOLO11 采用了改进的主干和颈部架构,增强了特征提取能力,可实现更精确的对象检测和复杂任务性能。
- 针对效率和速度进行了优化:YOLO11 引入了完善的架构设计和优化的训练流程,可提供更快的处理速度,并在准确度和性能之间保持最佳平衡。
- 更少的参数,更高的准确度:借助模型设计的进步,YOLO11m 在 COCO 数据集上实现了更高的平均准确度 (mAP),同时使用的参数比 YOLOv8m 少 22%,从而提高了计算效率,同时又不影响准确度。
- 跨环境的适应性:YOLO11 可以无缝部署在各种环境中,包括边缘设备、云平台和支持 NVIDIA GPU 的系统,从而确保最大的灵活性。
- 支持的任务范围广泛:无论是对象检测、实例分割、图像分类、姿势估计还是定向对象检测 (OBB),YOLO11 都旨在满足各种计算机视觉挑战。
支持的任务和模式
YOLO11 以 YOLOv8 中引入的多功能模型系列为基础,为各种计算机视觉任务提供增强的支持:
| Model | Filenames | Task | Inference | Validation | Training | Export |
|---|---|---|---|---|---|---|
| YOLO11 | yolol11n.pt, yolol11s.pt, yolol11m.pt, yolol11x.pt | Detection | ✅ | ✅ | ||
| ✅ | ✅ | |||||
| YOLO11-seg | yolol11n-seg.pt, yolol11s-seg.pt, yolol11m-seg.pt, | |||||
| yolol11x-seg.pt | Instance Segmentation | ✅ | ✅ | ✅ | ✅ | |
| YOLO11-pose | yolol11n-pose.pt, yolol11s-pose.pt, yolol11m-pose.pt, | |||||
| yolol11x-pose.pt | Pose/Keypoints | ✅ | ✅ | ✅ | ✅ | |
| YOLO11-obb | yolol11n-obb.pt, yolol11s-obb.pt, yolol11m-obb.pt, | |||||
| yolol11x-obb.pt | Oriented Detection | ✅ | ✅ | ✅ | ✅ | |
| YOLO11-cls | yolol11n-cls.pt, yolol11s-cls.pt, yolol11m-cls.pt, | |||||
| yolol11x-cls.pt | Classification | ✅ | ✅ | ✅ | ✅ |
简单的 YOLO11 训练和推理示例
以下示例适用于用于对象检测的 YOLO11 Detect 模型。
from ultralytics import YOLO
# Load a model
model = YOLO("yolo11n.pt")
# Train the model
train_results = model.train(
data="coco8.yaml", # path to dataset YAML
epochs=100, # number of training epochs
imgsz=640, # training image size
device="cpu", # device to run on, i.e. device=0 or device=0,1,2,3 or device=cpu
)
# Evaluate model performance on the validation set
metrics = model.val()
# Perform object detection on an image
results = model("path/to/image.jpg")
results[0].show()
# Export the model to ONNX format
path = model.export(format="onnx") # return path to exported model
支持部署于边缘设备
YOLO11 专为适应各种环境而设计,包括边缘设备。其优化的架构和高效的处理能力使其适合部署在边缘设备、云平台和支持 NVIDIA GPU
的系统上。这种灵活性确保 YOLO11 可用于各种应用,从移动设备上的实时检测到云环境中的复杂分割任务。有关部署选项的更多详细信息,请参阅导出文档。
YOLOv11 yaml文件
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
YOLO11和YOLOv8 yaml文件的区别

改进模块代码
-
C3k2
class C3k2(C2f):
“”“Faster Implementation of CSP Bottleneck with 2 convolutions.”“”def __init__(self, c1, c2, n=1, c3k=False, e=0.5, g=1, shortcut=True): """Initializes the C3k2 module, a faster CSP Bottleneck with 2 convolutions and optional C3k blocks.""" super().__init__(c1, c2, n, shortcut, g, e) self.m = nn.ModuleList( C3k(self.c, self.c, 2, shortcut, g) if c3k else Bottleneck(self.c, self.c, shortcut, g) for _ in range(n) )
C3k2,它是具有两个卷积的CSP(Partial Cross Stage)瓶颈架构的更快实现。
类继承:
C3k2继承自类C2f。这表明C2f很可能实现了经过修改的基本CSP结构,而C3k2进一步优化或修改了此结构。
构造函数(__init__):
-
c1:输入通道。 -
c2:输出通道。 -
n:瓶颈层数(默认为1)。 -
c3k:一个布尔标志,确定是否使用C3k块或常规Bottleneck块。 -
e:扩展比率,控制隐藏层的宽度(默认为0.5)。 -
g:分组卷积的组归一化参数或组数(默认值为 1)。 -
shortcut:一个布尔值,用于确定是否在网络中包含快捷方式连接(默认值为True)。
初始化:
super().__init__(c1, c2, n, short-cut, g, e)调用父类C2f的构造函数,初始化标准 CSP 组件,如通道数、快捷方式、组等。
模块列表(self.m):
-
nn.ModuleList存储C3k或Bottleneck模块,具体取决于c3k的值。 -
如果
c3k为True,它会初始化C3k模块。C3k模块接收以下参数: -
self.c:通道数(源自C2f)。 -
2:这表示在C3k块内使用了两个卷积层。 -
shortcut和g:从C3k2构造函数传递。 -
如果
c3k为False,则初始化标准Bottleneck模块。
for _ in range(n) 表示将创建 n 个这样的块。
总结:
-
C3k2实现了 CSP 瓶颈架构,可以选择使用自定义C3k块(具有两个卷积)或标准Bottleneck块,具体取决于c3k标志。 -
C2PSA
class C2PSA(nn.Module):
“”"
C2PSA module with attention mechanism for enhanced feature extraction and processing.This module implements a convolutional block with attention mechanisms to enhance feature extraction and processing capabilities. It includes a series of PSABlock modules for self-attention and feed-forward operations. Attributes: c (int): Number of hidden channels. cv1 (Conv): 1x1 convolution layer to reduce the number of input channels to 2*c. cv2 (Conv): 1x1 convolution layer to reduce the number of output channels to c. m (nn.Sequential): Sequential container of PSABlock modules for attention and feed-forward operations. Methods: forward: Performs a forward pass through the C2PSA module, applying attention and feed-forward operations. Notes: This module essentially is the same as PSA module, but refactored to allow stacking more PSABlock modules. Examples: >>> c2psa = C2PSA(c1=256, c2=256, n=3, e=0.5) >>> input_tensor = torch.randn(1, 256, 64, 64) >>> output_tensor = c2psa(input_tensor) """ def __init__(self, c1, c2, n=1, e=0.5): """Initializes the C2PSA module with specified input/output channels, number of layers, and expansion ratio.""" super().__init__() assert c1 == c2 self.c = int(c1 * e) self.cv1 = Conv(c1, 2 * self.c, 1, 1) self.cv2 = Conv(2 * self.c, c1, 1) self.m = nn.Sequential(*(PSABlock(self.c, attn_ratio=0.5, num_heads=self.c // 64) for _ in range(n))) def forward(self, x): """Processes the input tensor 'x' through a series of PSA blocks and returns the transformed tensor.""" a, b = self.cv1(x).split((self.c, self.c), dim=1) b = self.m(b) return self.cv2(torch.cat((a, b), 1))
C2PSA 模块是一个自定义神经网络层,带有注意力机制,用于增强特征提取和处理。
类概述
-
目的:
-
C2PSA模块引入了一个卷积块,利用注意力机制来改进特征提取和处理。 -
它使用一系列
PSABlock模块,这些模块可能代表某种形式的位置自注意力 (PSA),并且该架构旨在允许堆叠多个PSABlock层。
构造函数(__init__):
-
参数:
-
c1:输入通道(必须等于c2)。 -
c2:输出通道(必须等于c1)。 -
n:要堆叠的PSABlock模块数量(默认值为 1)。 -
e:扩展比率,用于计算隐藏通道的数量(默认值为 0.5)。 -
属性:
-
self.c:隐藏通道数,计算为int(c1 * e)。 -
self.cv1:一个1x1卷积,将输入通道数从c1减少到2 * self.c。这为将输入分成两部分做好准备。 -
self.cv2:另一个1x1卷积,处理后将通道维度恢复回c1。 -
self.m:一系列PSABlock模块。每个PSABlock接收self.c通道,注意头的数量为self.c // 64。每个块应用注意和前馈操作。
前向方法:
-
输入:
-
x,输入张量。 -
操作:
-
self.cv1(x)应用1x1卷积,将输入通道大小从c1减小到2 * self.c。 -
生成的张量沿通道维度分为两部分,
a和b。
-
a:第一个self.c通道。 -
b:剩余的self.c通道。
-
b通过顺序容器self.m,它是PSABlock模块的堆栈。这部分经过基于注意的处理。 -
处理后的张量
b与a连接。 -
self.cv2应用1x1卷积,将通道大小恢复为c1。
-
输出:
-
应用注意和卷积操作后的变换后的张量。
总结:
- C2PSA 是一个增强型卷积模块,它通过堆叠的
PSABlock模块应用位置自注意力。它拆分输入张量,将注意力应用于其中一部分,然后重新组合并通过最终卷积对其进行处理。此结构有助于从输入数据中提取复杂特征。
网络结构


8.200+种全套改进YOLOV11创新点原理讲解
8.1 200+种全套改进YOLOV11创新点原理讲解大全
由于篇幅限制,每个创新点的具体原理讲解就不全部展开,具体见下列网址中的改进模块对应项目的技术原理博客网址【Blog】(创新点均为模块化搭建,原理适配YOLOv5~YOLOv11等各种版本)

8.2 精选部分改进YOLOV11创新点原理讲解
这里节选部分改进创新点展开原理讲解(完整的改进原理见上图和改进模块技术原理博客链接【如果此小节的图加载失败可以通过CSDN或者Github搜索该博客的标题访问原始博客,原始博客图片显示正常】
Gold-YOLO
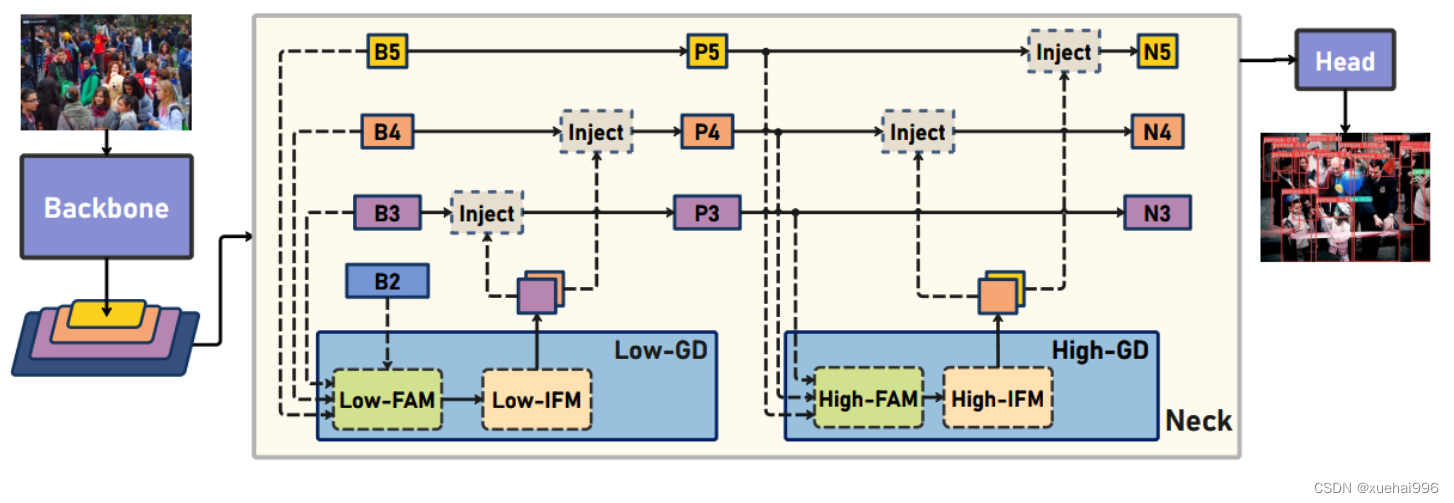
Preliminaries
YOLO系列的中间层结构采用了传统的FPN结构,其中包含多个分支用于多尺度特征融合。然而,它只充分融合来自相邻级别的特征,对于其他层次的信息只能间接地进行“递归”获取。
传统的FPN结构在信息传输过程中存在丢失大量信息的问题。这是因为层之间的信息交互仅限于中间层选择的信息,未被选择的信息在传输过程中被丢弃。这种情况导致某个Level的信息只能充分辅助相邻层,而对其他全局层的帮助较弱。因此,整体上信息融合的有效性可能受到限制。
为了避免在传输过程中丢失信息,本文采用了一种新颖的“聚集和分发”机制(GD),放弃了原始的递归方法。该机制使用一个统一的模块来收集和融合所有Level的信息,并将其分发到不同的Level。通过这种方式,作者不仅避免了传统FPN结构固有的信息丢失问题,还增强了中间层的部分信息融合能力,而且并没有显著增加延迟。

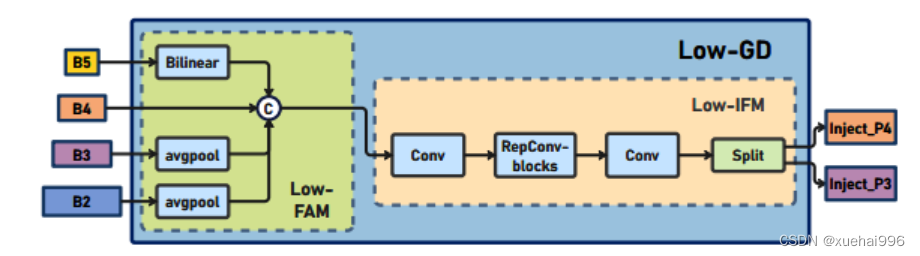
低阶聚合和分发分支 Low-stage gather-and-distribute branch
从主干网络中选择输出的B2、B3、B4、B5特征进行融合,以获取保留小目标信息的高分辨率特征。
高阶聚合和分发分支 High-stage gather-and-distribute branch
高级全局特征对齐模块(High-GD)将由低级全局特征对齐模块(Low-GD)生成的特征{P3, P4, P5}进行融合。
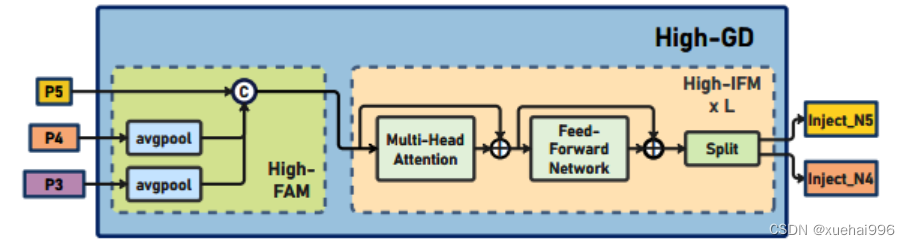
Transformer融合模块由多个堆叠的transformer组成,transformer块的数量为L。每个transformer块包括一个多头注意力块、一个前馈网络(FFN)和残差连接。采用与LeViT相同的设置来配置多头注意力块,使用16个通道作为键K和查询Q的头维度,32个通道作为值V的头维度。为了加速推理过程,将层归一化操作替换为批归一化,并将所有的GELU激活函数替换为ReLU。为了增强变换器块的局部连接,在两个1x1卷积层之间添加了一个深度卷积层。同时,将FFN的扩展因子设置为2,以在速度和计算成本之间取得平衡。
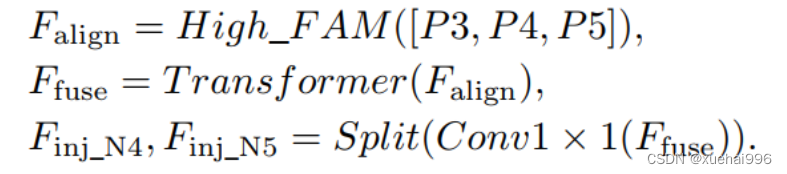
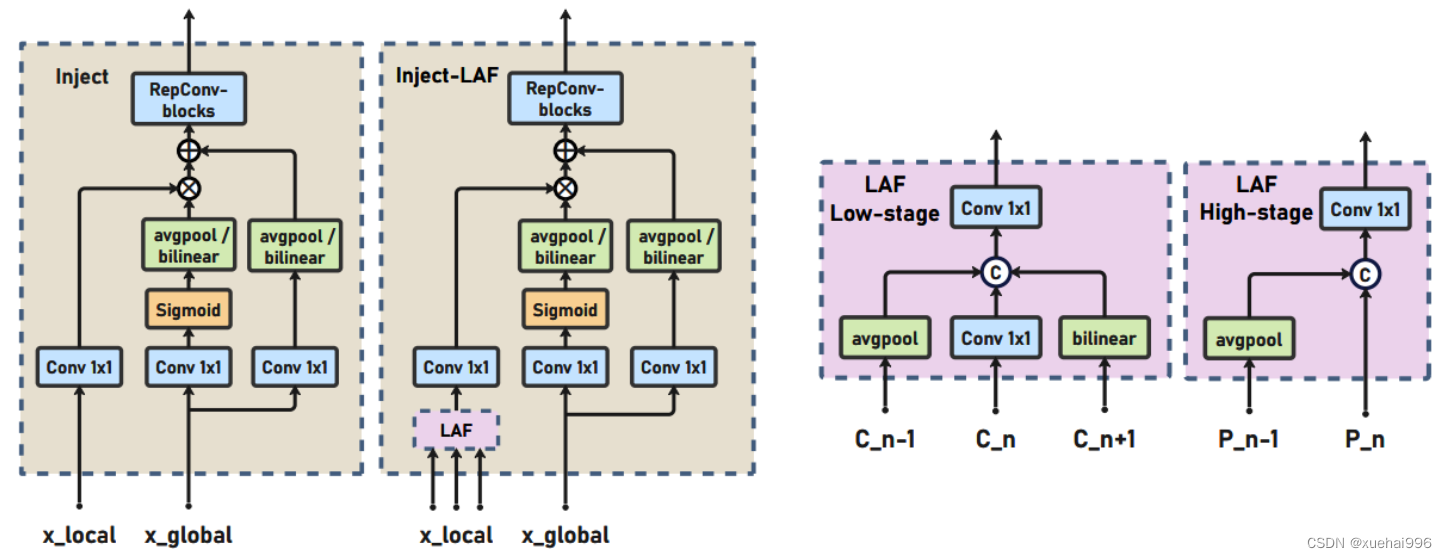
信息注入模块(Information injection module): 高级全局特征对齐模块(High-GD)中的信息注入模块与低级全局特征对齐模块(Low-GD)中的相同。在高级阶段,局部特征(Flocal)等于Pi,因此公式如下所示:

增强的跨层信息流动 Enhanced cross-layer information flow
为了进一步提升性能,从YOLOv6 中的PAFPN模块中得到启发,引入了Inject-LAF模块。该模块是注入模块的增强版,包括了一个轻量级相邻层融合(LAF)模块,该模块被添加到注入模块的输入位置。为了在速度和准确性之间取得平衡,设计了两个LAF模型:LAF低级模型和LAF高级模型,分别用于低级注入(合并相邻两层的特征)和高级注入(合并相邻一层的特征)。它们的结构如图5(b)所示。为了确保来自不同层级的特征图与目标大小对齐,在实现中的两个LAF模型仅使用了三个操作符:双线性插值(上采样过小的特征)、平均池化(下采样过大的特征)和1x1卷积(调整与目标通道不同的特征)。模型中的LAF模块与信息注入模块的结合有效地平衡了准确性和速度之间的关系。通过使用简化的操作,能够增加不同层级之间的信息流路径数量,从而提高性能而不显著增加延迟。
9.系统功能展示
图9.1.系统支持检测结果表格显示
图9.2.系统支持置信度和IOU阈值手动调节
图9.3.系统支持自定义加载权重文件best.pt(需要你通过步骤5中训练获得)
图9.4.系统支持摄像头实时识别
图9.5.系统支持图片识别
图9.6.系统支持视频识别
图9.7.系统支持识别结果文件自动保存
图9.8.系统支持Excel导出检测结果数据








10. YOLOv11核心改进源码讲解
10.1 activation.py
以下是对代码的逐文件分析,保留了最核心的部分,并进行了详细的中文注释:
# Ultralytics YOLO 🚀, AGPL-3.0 license
"""激活模块。"""
import torch
import torch.nn as nn
class AGLU(nn.Module):
"""统一激活函数模块,来源于 https://github.com/kostas1515/AGLU。"""
def __init__(self, device=None, dtype=None) -> None:
"""初始化统一激活函数模块。"""
super().__init__()
# 使用Softplus作为激活函数的一部分,beta设置为-1.0
self.act = nn.Softplus(beta=-1.0)
# 初始化lambda参数,并将其设为可学习的参数
self.lambd = nn.Parameter(nn.init.uniform_(torch.empty(1, device=device, dtype=dtype))) # lambda参数
# 初始化kappa参数,并将其设为可学习的参数
self.kappa = nn.Parameter(nn.init.uniform_(torch.empty(1, device=device, dtype=dtype))) # kappa参数
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""计算统一激活函数的前向传播。"""
# 将lambda参数限制在最小值为0.0001,避免出现负值或零
lam = torch.clamp(self.lambd, min=0.0001)
# 计算激活函数的输出
return torch.exp((1 / lam) * self.act((self.kappa * x) - torch.log(lam)))
代码核心部分分析:
-
AGLU类:这是一个自定义的激活函数模块,继承自
nn.Module,用于实现AGLU(Adaptive Gated Linear Unit)激活函数。 -
初始化方法
__init__:- 使用
nn.Softplus作为激活函数的一部分,beta参数设置为-1.0。 lambd和kappa是两个可学习的参数,分别用于控制激活函数的行为。它们通过均匀分布初始化,并且被定义为nn.Parameter,使得它们在训练过程中可以被优化。
- 使用
-
前向传播方法
forward:- 输入
x是一个张量,表示传入激活函数的数据。 - 使用
torch.clamp将lambd限制在0.0001以上,以避免计算中的数值不稳定性。 - 计算并返回激活函数的输出,使用了指数函数和Softplus函数的组合。
- 输入
总结:
这个模块实现了一个自适应的激活函数,适用于深度学习模型中,可以根据输入动态调整激活值。通过学习lambd和kappa参数,模型能够更好地适应不同的数据分布。
这个文件名为 activation.py,主要定义了一个名为 AGLU 的激活函数模块。该模块是基于 PyTorch 深度学习框架构建的,使用了 AGPL-3.0 许可证。
在文件的开头,首先导入了 PyTorch 及其神经网络模块 torch.nn。接着定义了 AGLU 类,该类继承自 nn.Module,这是 PyTorch 中所有神经网络模块的基类。
在 AGLU 类的构造函数 __init__ 中,初始化了两个参数 lambd 和 kappa,这两个参数都是通过均匀分布初始化的可学习参数。lambd 是一个与激活函数相关的参数,kappa 则用于调整输入张量 x 的值。此外,构造函数中还定义了一个激活函数 self.act,使用了 nn.Softplus,其参数 beta 被设置为 -1.0。
forward 方法是该模块的前向传播函数,它接收一个张量 x 作为输入。在这个方法中,首先对 lambd 参数进行限制,确保其最小值为 0.0001,以避免在后续计算中出现除以零的情况。然后,计算并返回激活函数的输出。具体来说,输出是通过将输入 x 乘以 kappa,减去 lambd 的对数,再经过 self.act 激活函数处理后,最后通过指数函数进行变换。
总体而言,这个模块实现了一种统一的激活函数,结合了可学习的参数,能够在深度学习模型中灵活应用。
10.2 EfficientFormerV2.py
以下是经过简化并注释的核心代码部分,主要包括模型的定义和一些关键组件的实现。
import torch
import torch.nn as nn
import math
import itertools
class Attention4D(nn.Module):
"""4D注意力机制模块"""
def __init__(self, dim=384, key_dim=32, num_heads=8, attn_ratio=4, resolution=7, act_layer=nn.ReLU, stride=None):
super().__init__()
self.num_heads = num_heads # 注意力头的数量
self.scale = key_dim ** -0.5 # 缩放因子
self.key_dim = key_dim # 键的维度
self.d = int(attn_ratio * key_dim) # 注意力输出的维度
self.dh = self.d * num_heads # 总的注意力输出维度
# 处理输入分辨率和步幅
if stride is not None:
self.resolution = math.ceil(resolution / stride)
self.stride_conv = nn.Sequential(
nn.Conv2d(dim, dim, kernel_size=3, stride=stride, padding=1, groups=dim),
nn.BatchNorm2d(dim)
)
self.upsample = nn.Upsample(scale_factor=stride, mode='bilinear')
else:
self.resolution = resolution
self.stride_conv = None
self.upsample = None
# 定义查询、键、值的卷积层
self.q = nn.Conv2d(dim, num_heads * key_dim, kernel_size=1)
self.k = nn.Conv2d(dim, num_heads * key_dim, kernel_size=1)
self.v = nn.Conv2d(dim, num_heads * self.d, kernel_size=1)
# 注意力偏置
points = list(itertools.product(range(self.resolution), range(self.resolution)))
N = len(points)
attention_offsets = {}
idxs = []
for p1 in points:
for p2 in points:
offset = (abs(p1[0] - p2[0]), abs(p1[1] - p2[1]))
if offset not in attention_offsets:
attention_offsets[offset] = len(attention_offsets)
idxs.append(attention_offsets[offset])
self.attention_biases = nn.Parameter(torch.zeros(num_heads, len(attention_offsets)))
self.register_buffer('attention_bias_idxs', torch.LongTensor(idxs).view(N, N))
def forward(self, x):
"""前向传播"""
B, C, H, W = x.shape
if self.stride_conv is not None:
x = self.stride_conv(x) # 进行步幅卷积
# 计算查询、键、值
q = self.q(x).flatten(2).reshape(B, self.num_heads, -1, self.resolution).permute(0, 1, 3, 2)
k = self.k(x).flatten(2).reshape(B, self.num_heads, -1, self.resolution).permute(0, 1, 2, 3)
v = self.v(x).flatten(2).reshape(B, self.num_heads, -1, self.resolution).permute(0, 1, 3, 2)
# 计算注意力权重
attn = (q @ k) * self.scale + self.attention_biases[:, self.attention_bias_idxs]
attn = attn.softmax(dim=-1) # 归一化为概率分布
# 计算输出
x = (attn @ v).transpose(2, 3).reshape(B, self.dh, self.resolution, self.resolution)
if self.upsample is not None:
x = self.upsample(x) # 上采样
return x
class EfficientFormerV2(nn.Module):
"""EfficientFormerV2模型"""
def __init__(self, layers, embed_dims, num_classes=1000):
super().__init__()
self.patch_embed = nn.Conv2d(3, embed_dims[0], kernel_size=3, stride=2, padding=1) # 初始卷积层
self.network = nn.ModuleList() # 存储网络的各个层
# 构建网络的各个阶段
for i in range(len(layers)):
stage = self._make_layer(embed_dims[i], layers[i]) # 创建每一层
self.network.append(stage)
def _make_layer(self, dim, layers):
"""创建一层"""
blocks = []
for _ in range(layers):
blocks.append(Attention4D(dim)) # 添加注意力模块
return nn.Sequential(*blocks)
def forward(self, x):
"""前向传播"""
x = self.patch_embed(x) # 通过初始卷积层
for block in self.network:
x = block(x) # 通过网络的每一层
return x
# 示例用法
if __name__ == '__main__':
inputs = torch.randn((1, 3, 640, 640)) # 输入数据
model = EfficientFormerV2(layers=[2, 2, 2], embed_dims=[32, 64, 128]) # 创建模型
res = model(inputs) # 前向传播
print(res.shape) # 输出结果的形状
代码说明:
- Attention4D: 这是一个实现4D注意力机制的模块。它包含了查询、键、值的计算,并通过注意力权重来生成输出。
- EfficientFormerV2: 这是整个模型的定义,包含了初始的卷积层和多个注意力模块的堆叠。
- 前向传播: 在
forward方法中,输入数据首先通过初始卷积层,然后依次通过每个注意力模块,最终输出结果。
该代码是EfficientFormerV2模型的核心部分,主要关注注意力机制和模型的结构设计。
这个程序文件实现了一个名为EfficientFormerV2的深度学习模型,主要用于图像处理任务。该模型的设计灵感来源于高效的视觉变换器(Vision Transformer)架构,旨在提高计算效率和模型性能。
首先,文件中定义了一些模型的超参数,包括不同规模(S0, S1, S2, L)的网络宽度和深度。这些参数通过字典的形式存储,方便后续调用。每种规模的网络在参数数量和性能上都有所不同,适应不同的应用场景。
接下来,文件中定义了多个类,主要包括Attention4D、LGQuery、Attention4DDownsample、Embedding、Mlp、AttnFFN、FFN等。这些类构成了模型的基础组件。Attention4D类实现了一个四维注意力机制,能够处理输入的图像特征并进行自适应的加权。LGQuery类用于生成局部查询特征,Attention4DDownsample类则结合了注意力机制和下采样操作,适用于特征图的降维。
Embedding类负责将输入图像转换为嵌入特征,支持不同的处理方式,如轻量级处理和自适应下采样。Mlp类实现了多层感知机结构,主要用于特征的非线性变换。AttnFFN和FFN类则结合了注意力机制和前馈网络,形成了模型的核心结构。
在EfficientFormerV2类中,模型的整体架构被构建。该类接收多个参数,包括层数、嵌入维度、下采样策略等,并根据这些参数构建网络的各个阶段。模型的前向传播方法定义了如何通过各个模块处理输入数据,并在特定层输出特征。
此外,文件中还定义了一些辅助函数,如update_weight用于更新模型权重,efficientformerv2_s0、efficientformerv2_s1、efficientformerv2_s2和efficientformerv2_l等函数用于创建不同规模的EfficientFormerV2模型,并可加载预训练权重。
最后,在文件的主程序部分,定义了一些测试代码,创建了不同规模的模型实例,并对随机生成的输入数据进行前向传播,输出各层的特征图尺寸。这部分代码用于验证模型的正确性和性能。
总体而言,该文件实现了一个高效的视觉变换器模型,结合了多种深度学习技术,适用于图像分类、目标检测等任务。
10.3 transformer.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
from functools import partial
# 定义线性归一化和RepBN的组合
ln = nn.LayerNorm
linearnorm = partial(LinearNorm, norm1=ln, norm2=RepBN, step=60000)
class TransformerEncoderLayer_RepBN(nn.Module):
def __init__(self, c1, cm=2048, num_heads=8, dropout=0, act=..., normalize_before=False):
"""
初始化Transformer编码器层,使用RepBN进行归一化。
参数:
c1: 输入特征的通道数
cm: 中间特征的通道数
num_heads: 注意力头的数量
dropout: dropout比率
act: 激活函数
normalize_before: 是否在注意力计算之前进行归一化
"""
super().__init__()
self.norm1 = linearnorm(c1) # 第一层归一化
self.norm2 = linearnorm(c1) # 第二层归一化
class AIFI_RepBN(TransformerEncoderLayer_RepBN):
"""定义AIFI变换器层。"""
def __init__(self, c1, cm=2048, num_heads=8, dropout=0, act=nn.GELU(), normalize_before=False):
"""初始化AIFI实例,指定参数。"""
super().__init__(c1, cm, num_heads, dropout, act, normalize_before)
def forward(self, x):
"""AIFI变换器层的前向传播。"""
c, h, w = x.shape[1:] # 获取输入的通道数、高度和宽度
pos_embed = self.build_2d_sincos_position_embedding(w, h, c) # 构建2D位置嵌入
# 将输入张量从形状[B, C, H, W]展平为[B, HxW, C]
x = super().forward(x.flatten(2).permute(0, 2, 1), pos=pos_embed.to(device=x.device, dtype=x.dtype))
# 将输出张量恢复为形状[B, C, H, W]
return x.permute(0, 2, 1).view([-1, c, h, w]).contiguous()
@staticmethod
def build_2d_sincos_position_embedding(w, h, embed_dim=256, temperature=10000.0):
"""构建2D正弦-余弦位置嵌入。"""
assert embed_dim % 4 == 0, "嵌入维度必须是4的倍数,以便进行2D正弦-余弦位置嵌入"
grid_w = torch.arange(w, dtype=torch.float32) # 水平方向的网格
grid_h = torch.arange(h, dtype=torch.float32) # 垂直方向的网格
grid_w, grid_h = torch.meshgrid(grid_w, grid_h, indexing="ij") # 创建网格
pos_dim = embed_dim // 4 # 计算位置嵌入的维度
omega = torch.arange(pos_dim, dtype=torch.float32) / pos_dim # 计算频率
omega = 1.0 / (temperature**omega) # 温度缩放
# 计算正弦和余弦的位置嵌入
out_w = grid_w.flatten()[..., None] @ omega[None]
out_h = grid_h.flatten()[..., None] @ omega[None]
# 返回组合的正弦和余弦位置嵌入
return torch.cat([torch.sin(out_w), torch.cos(out_w), torch.sin(out_h), torch.cos(out_h)], 1)[None]
代码核心部分说明:
-
TransformerEncoderLayer_RepBN:这是一个变换器编码器层的基础类,使用了RepBN(重参数化批归一化)和标准的层归一化。它定义了两个归一化层
norm1和norm2。 -
AIFI_RepBN:这是一个继承自
TransformerEncoderLayer_RepBN的类,定义了AIFI变换器层。它实现了前向传播方法,并构建了2D正弦-余弦位置嵌入。 -
build_2d_sincos_position_embedding:这是一个静态方法,用于生成2D位置嵌入,确保嵌入维度是4的倍数,并通过正弦和余弦函数生成位置编码。
这个程序文件定义了一个基于Transformer架构的编码器层,特别是实现了带有重参数化批归一化(RepBN)的AIFI(Attention with Improved Feature Interaction)层。文件中首先导入了必要的PyTorch库和模块,包括神经网络(nn)和功能性操作(F),以及一些自定义的模块。
在文件中,首先定义了一个名为linearnorm的部分函数,它结合了层归一化(LayerNorm)和重参数化批归一化(RepBN),并设置了一个步长参数。接着,定义了一个名为TransformerEncoderLayer_RepBN的类,该类继承自TransformerEncoderLayer。在其构造函数中,调用了父类的构造函数,并初始化了两个归一化层,分别为norm1和norm2,这两个层使用了之前定义的linearnorm。
接下来,定义了AIFI_RepBN类,它继承自TransformerEncoderLayer_RepBN,并实现了AIFI Transformer层的具体功能。在其构造函数中,调用了父类的构造函数,并可以接受多个参数,如输入通道数、隐藏层大小、头数、丢弃率、激活函数等。
在AIFI_RepBN类中,重写了forward方法,该方法实现了前向传播的过程。首先,获取输入张量的形状信息(通道数、高度和宽度),然后构建二维正弦余弦位置嵌入。接着,将输入张量从形状[B, C, H, W]展平为[B, HxW, C],并调用父类的forward方法进行处理,最后将输出张量的形状转换回原来的格式。
此外,AIFI_RepBN类中还定义了一个静态方法build_2d_sincos_position_embedding,用于构建二维正弦余弦位置嵌入。该方法接受宽度、高度、嵌入维度和温度参数,确保嵌入维度能够被4整除。通过生成网格坐标并计算正弦和余弦值,最终返回一个包含位置嵌入的张量。
总体而言,这个文件实现了一个增强的Transformer编码器层,结合了位置嵌入和重参数化批归一化的技术,旨在提高模型的性能和表达能力。
10.4 attention.py
以下是经过简化和注释的核心代码部分,主要保留了 EMA, SimAM, SpatialGroupEnhance, TopkRouting, KVGather, QKVLinear, BiLevelRoutingAttention 等类的实现,并对每个类的功能进行了详细的中文注释。
import torch
from torch import nn
import torch.nn.functional as F
class EMA(nn.Module):
"""
指数移动平均 (Exponential Moving Average) 模块
用于计算输入特征的加权平均值,增强特征表示能力。
"""
def __init__(self, channels, factor=8):
super(EMA, self).__init__()
self.groups = factor # 将通道分成多个组
assert channels // self.groups > 0 # 确保每组有通道
self.softmax = nn.Softmax(-1) # 用于计算权重
self.agp = nn.AdaptiveAvgPool2d((1, 1)) # 自适应平均池化
self.pool_h = nn.AdaptiveAvgPool2d((None, 1)) # 对高度进行池化
self.pool_w = nn.AdaptiveAvgPool2d((1, None)) # 对宽度进行池化
self.gn = nn.GroupNorm(channels // self.groups, channels // self.groups) # 组归一化
self.conv1x1 = nn.Conv2d(channels // self.groups, channels // self.groups, kernel_size=1) # 1x1卷积
self.conv3x3 = nn.Conv2d(channels // self.groups, channels // self.groups, kernel_size=3, padding=1) # 3x3卷积
def forward(self, x):
b, c, h, w = x.size() # 获取输入的批量大小、通道数、高度和宽度
group_x = x.reshape(b * self.groups, -1, h, w) # 将输入重塑为多个组
x_h = self.pool_h(group_x) # 对每组进行高度池化
x_w = self.pool_w(group_x).permute(0, 1, 3, 2) # 对每组进行宽度池化并转置
hw = self.conv1x1(torch.cat([x_h, x_w], dim=2)) # 连接并通过1x1卷积
x_h, x_w = torch.split(hw, [h, w], dim=2) # 分割回高度和宽度
x1 = self.gn(group_x * x_h.sigmoid() * x_w.permute(0, 1, 3, 2).sigmoid()) # 计算加权特征
x2 = self.conv3x3(group_x) # 通过3x3卷积计算特征
weights = (self.softmax(self.agp(x1).reshape(b * self.groups, -1, 1).permute(0, 2, 1)) +
self.softmax(self.agp(x2).reshape(b * self.groups, -1, 1).permute(0, 2, 1))).reshape(b * self.groups, 1, h, w) # 计算权重
return (group_x * weights.sigmoid()).reshape(b, c, h, w) # 返回加权后的特征
class SimAM(nn.Module):
"""
SimAM (Simple Attention Module)
用于增强特征的表示能力,基于输入特征的均值进行自适应加权。
"""
def __init__(self, e_lambda=1e-4):
super(SimAM, self).__init__()
self.activaton = nn.Sigmoid() # 激活函数
self.e_lambda = e_lambda # 正则化参数
def forward(self, x):
b, c, h, w = x.size() # 获取输入的批量大小、通道数、高度和宽度
n = w * h - 1 # 计算总的像素数
x_minus_mu_square = (x - x.mean(dim=[2, 3], keepdim=True)).pow(2) # 计算每个像素与均值的平方差
y = x_minus_mu_square / (4 * (x_minus_mu_square.sum(dim=[2, 3], keepdim=True) / n + self.e_lambda)) + 0.5 # 计算自适应权重
return x * self.activaton(y) # 返回加权后的特征
class SpatialGroupEnhance(nn.Module):
"""
空间组增强模块
通过自适应加权增强特征表示。
"""
def __init__(self, groups=8):
super().__init__()
self.groups = groups # 组数
self.avg_pool = nn.AdaptiveAvgPool2d(1) # 自适应平均池化
self.weight = nn.Parameter(torch.zeros(1, groups, 1, 1)) # 权重参数
self.bias = nn.Parameter(torch.zeros(1, groups, 1, 1)) # 偏置参数
self.sig = nn.Sigmoid() # 激活函数
self.init_weights() # 初始化权重
def init_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out') # Kaiming初始化
if m.bias is not None:
nn.init.constant_(m.bias, 0) # 偏置初始化为0
def forward(self, x):
b, c, h, w = x.shape # 获取输入的批量大小、通道数、高度和宽度
x = x.view(b * self.groups, -1, h, w) # 重塑输入
xn = x * self.avg_pool(x) # 计算加权特征
xn = xn.sum(dim=1, keepdim=True) # 对组进行求和
t = xn.view(b * self.groups, -1) # 重塑
t = t - t.mean(dim=1, keepdim=True) # 减去均值
std = t.std(dim=1, keepdim=True) + 1e-5 # 计算标准差
t = t / std # 归一化
t = t.view(b, self.groups, h, w) # 重塑
t = t * self.weight + self.bias # 加权
x = x * self.sig(t) # 返回加权后的特征
return x.view(b, c, h, w) # 恢复原始形状
class TopkRouting(nn.Module):
"""
可微分的 Top-k 路由模块
用于选择特征中的 Top-k 重要部分。
"""
def __init__(self, qk_dim, topk=4):
super().__init__()
self.topk = topk # Top-k 参数
self.qk_dim = qk_dim # 查询和键的维度
self.scale = qk_dim ** -0.5 # 缩放因子
self.routing_act = nn.Softmax(dim=-1) # Softmax激活
def forward(self, query: Tensor, key: Tensor) -> Tuple[Tensor]:
"""
Args:
query, key: (n, p^2, c) tensor
Return:
r_weight, topk_index: (n, p^2, topk) tensor
"""
query_hat, key_hat = query, key # 直接使用查询和键
attn_logit = (query_hat * self.scale) @ key_hat.transpose(-2, -1) # 计算注意力得分
topk_attn_logit, topk_index = torch.topk(attn_logit, k=self.topk, dim=-1) # 选择Top-k
r_weight = self.routing_act(topk_attn_logit) # 计算路由权重
return r_weight, topk_index # 返回权重和索引
class KVGather(nn.Module):
"""
K-V 收集模块
用于根据路由索引收集键值对。
"""
def __init__(self, mul_weight='none'):
super().__init__()
assert mul_weight in ['none', 'soft', 'hard'] # 检查加权方式
self.mul_weight = mul_weight # 存储加权方式
def forward(self, r_idx: Tensor, r_weight: Tensor, kv: Tensor):
"""
r_idx: (n, p^2, topk) tensor
r_weight: (n, p^2, topk) tensor
kv: (n, p^2, w^2, c_kq+c_v)
Return:
(n, p^2, topk, w^2, c_kq+c_v) tensor
"""
n, p2, w2, c_kv = kv.size() # 获取kv的尺寸
topk = r_idx.size(-1) # 获取Top-k数量
topk_kv = torch.gather(kv.view(n, 1, p2, w2, c_kv).expand(-1, p2, -1, -1, -1), # 收集键值对
dim=2,
index=r_idx.view(n, p2, topk, 1, 1).expand(-1, -1, -1, w2, c_kv)) # 根据索引收集
if self.mul_weight == 'soft':
topk_kv = r_weight.view(n, p2, topk, 1, 1) * topk_kv # 软加权
return topk_kv # 返回收集的键值对
class QKVLinear(nn.Module):
"""
QKV 线性映射模块
用于将输入特征映射到查询、键和值的空间。
"""
def __init__(self, dim, qk_dim, bias=True):
super().__init__()
self.qkv = nn.Linear(dim, qk_dim + qk_dim + dim, bias=bias) # 线性映射
def forward(self, x):
q, kv = self.qkv(x).split([self.qk_dim, self.qk_dim + x.size(1)], dim=-1) # 分割为查询和键值
return q, kv # 返回查询和键值
class BiLevelRoutingAttention(nn.Module):
"""
双层路由注意力模块
结合了局部和全局注意力机制。
"""
def __init__(self, dim, num_heads=8, n_win=7, qk_dim=None):
super().__init__()
self.dim = dim # 输入特征维度
self.n_win = n_win # 窗口数量
self.num_heads = num_heads # 注意力头数量
self.qk_dim = qk_dim or dim # 查询和键的维度
self.router = TopkRouting(qk_dim=self.qk_dim, topk=4) # 初始化路由器
self.kv_gather = KVGather(mul_weight='soft') # 初始化K-V收集器
self.qkv = QKVLinear(self.dim, self.qk_dim) # 初始化QKV线性映射
def forward(self, x):
"""
x: NHWC tensor
Return:
NHWC tensor
"""
# 处理输入特征并计算注意力
q, kv = self.qkv(x) # 计算QKV
r_weight, r_idx = self.router(q, kv) # 计算路由权重和索引
kv_pix_sel = self.kv_gather(r_idx=r_idx, r_weight=r_weight, kv=kv) # 收集K-V
# 进行注意力计算并返回结果
return kv_pix_sel # 返回选择的K-V
# 其他类和功能可以根据需要进行保留和注释
以上代码保留了主要的注意力机制和增强模块,注释详细解释了每个类的功能和主要操作。根据需要,可以进一步添加或删除其他类。
这个程序文件 attention.py 定义了一系列用于实现注意力机制的类和函数,主要用于深度学习模型中的特征增强和信息提取。文件中包含多种注意力机制的实现,如 EMA、SimAM、SpatialGroupEnhance、BiLevelRoutingAttention 等。以下是对文件中主要内容的详细说明。
首先,文件导入了必要的库,包括 PyTorch、Torchvision 和一些自定义模块。接着,定义了一些公共的注意力模块,供后续使用。
EMA (Exponential Moving Average) 类实现了一种基于通道的注意力机制。它通过对输入特征图进行分组、池化和卷积操作,计算出每个通道的加权系数,并通过 Sigmoid 函数进行激活,最终对输入进行加权。
SimAM (Similarity Attention Module) 类则实现了一种基于相似度的注意力机制。它通过计算输入特征的均值和方差,得到每个位置的相似度得分,并通过 Sigmoid 函数进行激活,进而调整输入特征。
SpatialGroupEnhance 类实现了一种空间增强机制,通过对输入特征进行分组处理,计算每个组的平均值,并生成相应的权重,增强特征的表达能力。
TopkRouting 类实现了一种可微分的 Top-k 路由机制,用于选择最重要的特征。它通过对查询和键进行线性变换,计算注意力得分,并选取 Top-k 个得分最高的特征进行后续处理。
KVGather 类用于根据路由索引选择键值对。它支持软和硬路由方式,可以根据权重对选择的特征进行加权。
BiLevelRoutingAttention 类实现了一种双层路由注意力机制。它结合了全局和局部注意力,通过对输入进行分块处理,计算每个块的注意力得分,并进行加权聚合。
CoordAtt 类实现了一种坐标注意力机制,通过对输入特征进行空间和通道的增强,提升模型对空间信息的敏感性。
BAMBlock 和 TripletAttention 类实现了通道和空间注意力的结合,进一步增强特征的表达能力。
EfficientAttention 类实现了一种高效的注意力机制,支持多种卷积核和窗口大小的选择,以适应不同的输入特征。
LSKA (Large-Separable-Kernel-Attention) 类实现了一种大可分离卷积注意力机制,通过使用不同大小的卷积核来捕捉多尺度特征。
SegNext_Attention 类是为语义分割任务设计的注意力机制,结合了多种卷积操作以提取丰富的特征信息。
DAttention 类实现了一种变形卷积注意力机制,支持动态调整卷积核的位置,以适应输入特征的变化。
FocusedLinearAttention 类实现了一种聚焦线性注意力机制,通过对输入特征进行窗口划分和线性变换,计算注意力得分并进行加权聚合。
MLCA (MultiPath Coordinate Attention) 类实现了一种多路径坐标注意力机制,通过对输入特征进行多路径处理,增强模型对空间信息的敏感性。
AFGCAttention 类实现了一种自适应细粒度通道注意力机制,通过全局平均池化和一维卷积,计算每个通道的重要性,并对输入特征进行加权。
总的来说,这个文件实现了多种注意力机制,旨在提升深度学习模型在图像处理和特征提取任务中的性能。每个类都有其特定的功能和实现方式,可以根据需要进行组合和扩展。
注意:由于此博客编辑较早,上面“10.YOLOv11核心改进源码讲解”中部分代码可能会优化升级,仅供参考学习,以“11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)”的内容为准。
11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)

参考原始博客1: https://gitee.com/Vision-Studios/grass-weeds79
参考原始博客2: https://github.com/Qunmasj-Vision-Studio/grass-weeds79


















 926
926

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









