







求解整数规划的分支定界算法是一个树搜索(Tree-Search)算法。它的基本思想是考虑整数规划问题的松弛问题,通过增加“整性”约束条件来构造子问题,求解所有子问题从而得到最优的整数解。通过“定界”,可以避免不必要的搜索。
分支定界法
我们用一个例子来说明。考虑下面的整数规划问题:
max
4
x
1
+
5
x
2
s.t.
x
1
+
4
x
2
≤
10
3
x
1
−
4
x
2
≤
6
x
1
,
x
2
∈
z
+
(IP)
\begin{aligned} \max~ & 4x_1+5x_2\\ \text{s.t. } & x_1+4x_2 \leq 10\\ & 3x_1-4x_2 \leq 6\\ & x_1, x_2 \in \mathbb{z}^+ \end{aligned}\quad \text{(IP)}
max s.t. 4x1+5x2x1+4x2≤103x1−4x2≤6x1,x2∈z+(IP)
注意:
x
1
,
x
2
x_1, x_2
x1,x2 是正整数。如果不考虑整性约束,那么它就是线性规划问题,称为整数规划问题的松弛问题。
分支
考虑松弛问题:
max
4
x
1
+
5
x
2
s.t.
x
1
+
4
x
2
≤
10
3
x
1
−
4
x
2
≤
6
x
1
,
x
2
≥
0
(LP0)
\begin{aligned} \max~ & 4x_1+5x_2\\ \text{s.t. } & x_1+4x_2 \leq 10\\ & 3x_1-4x_2 \leq 6\\ & x_1, x_2 \geq 0 \end{aligned}\quad \text{(LP0)}
max s.t. 4x1+5x2x1+4x2≤103x1−4x2≤6x1,x2≥0(LP0)
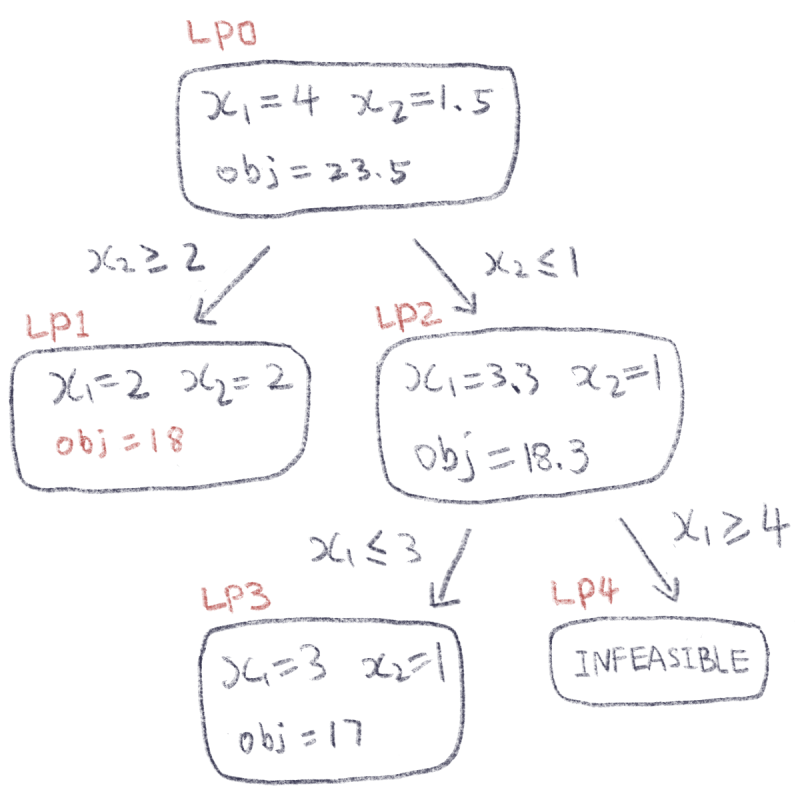
我们发现最优解
x
∗
=
(
4
,
1.5
)
x^* = (4, 1.5)
x∗=(4,1.5)。此时,
x
2
x_2
x2 不是整数。接下来考虑两个子问题
LP
(
1
)
\text{LP}(1)
LP(1) 和
LP
(
2
)
\text{LP}(2)
LP(2),分别在父问题的基础上增加约束
x
2
≤
1
x_2\leq 1
x2≤1 和
x
2
≥
2
x_2 \geq 2
x2≥2。
max
4
x
1
+
5
x
2
s.t.
x
1
+
4
x
2
≤
10
3
x
1
−
4
x
2
≤
6
x
2
≤
1
x
1
,
x
2
≥
0
(
LP1
)
\begin{aligned} \max~ & 4x_1+5x_2\\ \text{s.t. } & x_1+4x_2 \leq 10\\ & 3x_1-4x_2 \leq 6\\ & \mathbf{x_2 \leq 1}\\ & x_1, x_2 \geq 0 \end{aligned}\quad (\text{LP1})
max s.t. 4x1+5x2x1+4x2≤103x1−4x2≤6x2≤1x1,x2≥0(LP1)
max 4 x 1 + 5 x 2 s.t. x 1 + 4 x 2 ≤ 10 3 x 1 − 4 x 2 ≤ 6 x 2 ≥ 2 x 1 , x 2 ≥ 0 ( LP2 ) \begin{aligned} \max~ & 4x_1+5x_2\\ \text{s.t. } & x_1+4x_2 \leq 10\\ & 3x_1-4x_2 \leq 6\\ & \mathbf{x_2 \geq 2}\\ & x_1, x_2 \geq 0 \end{aligned}\quad (\text{LP2}) max s.t. 4x1+5x2x1+4x2≤103x1−4x2≤6x2≥2x1,x2≥0(LP2)
再分别求解 LP 1 \text{LP}1 LP1 和 LP2 \text{LP2} LP2。重复这样的步骤,直到无可行解或枚举完所有情形(过程如下图所示)。
定界
上图搜索树中的叶子结点,要么得到整数可行解,要么无可行解。在实际中,不一定要搜索所有情况,因为可以通过判定最优值的下界(最大化问题),从而过滤掉不必要的分支。
考虑某个结点 i i i,假设其最优解是整数解。其目标函数值 obj i \text{obj}_i obji 是原问题 IP \text{IP} IP 的下界,即 OPT ≥ obj i \text{OPT} \geq {\text{obj}_i} OPT≥obji。考虑某个节点 j j j,假设其最优目标函数值 obj j < obj i \text{obj}_j < \text{obj}_i objj<obji,那么节点 j j j 及其子节点可以跳过,因为松弛问题的最优目标函数值是对应整数规划的最优目标函数值的上界。
算法实现
我们用Python实现。线性规划求解器采用谷歌的ORTools。
先定义问题的输入: c ∈ R n c\in\mathbb{R}^n c∈Rn, A ∈ R m × n A\in\mathbb{R}^{m\times n} A∈Rm×n, b ∈ R m b\in\mathbb{R}^m b∈Rm 是整数规划问题的参数。此外 lb , ub ∈ R n \text{lb}, \text{ub}\in \mathbb{R}^n lb,ub∈Rn 是决策变量的下界和上界。
import numpy as np
class BranchBound(object):
""" 分支定界法
注意:
1、最大化问题。
2、整数规划。
3、决策变量非负。
"""
def __init__(self, c, A, b, lb=None, ub=None):
"""
:param c: n * 1 vector
:param A: m * n matrix
:param b: m * 1 vector
:param lb: list, lower bounds of x, e.g. [0, 0, 1, ...]
:param ub: list, upper bounds of x, e.g. [None, None, ...], None 代表正无穷
"""
self._c = c
self._A = A
self._b = b
self._lb = lb
self._ub = ub
self._m = len(A)
self._n = len(c)
self._sol = None # 决策变量的值
self._obj_val = -np.inf # 目标函数值
先直接看分支定界算法的实现,采用深度优先的方式进行搜索。
class BranchBound(object):
# ...
# 其它函数省略
def _solve_dfs(self, v: Node):
""" 给定节点v,采用深度优先,搜索v的子树。
"""
status = v.solve() # 求解节点v对应的线性规划问题
# 如果没有可行解,则返回
if status == pywraplp.Solver.INFEASIBLE:
return
# 如果有可行解,接下来搜索v的子树
sol = v.get_sol()
val = v.get_obj_val()
# 判断v的最优目标函数值是否小于下界,如果是则返回(剪枝)
# self._obj_val 代表当前的下界,初始值为负无穷
if val < self._obj_val:
return
# 否则找到一个非整数的决策变量,进行分支
branch_ind = self._get_branch_ind(sol)
if branch_ind is not None:
# 构造两个新的节点
c1, c2 = _get_children(v, branch_ind)
# 递归搜索c1和c2对应的子树
self._solve_dfs(c1)
self._solve_dfs(c2)
# 更新下界
elif val > self._obj_val:
self._sol = sol
self._obj_val = val
然后是每个节点的定义和方法(包括调用ORTools求解线性规划)。
from ortools.linear_solver import pywraplp
class Node(object):
""" LP relaxation model.
"""
def __init__(self, c, A, b, lb, ub):
self._c = c
self._A = A
self._b = b
self.lb = lb
self.ub = ub
self._sol = None
self._obj_val = None
def _create_model(self):
""" 根据输入,初始化模型。
"""
model = pywraplp.Solver.CreateSolver('GLOP')
m, n = len(self._b), len(self._c)
# 决策变量
x = [model.NumVar(self.lb[j], self.ub[j], 'x[%d]' % j) for j in range(n)]
# 约束: Ax <= b
for i in range(m):
ct = model.Constraint(-model.infinity(), self._b[i])
for j in range(n):
ct.SetCoefficient(x[j], self._A[i][j])
# 目标
obj = model.Objective()
for j in range(n):
obj.SetCoefficient(x[j], self._c[j])
obj.SetMaximization()
return model, x, obj
def solve(self):
""" 求解模型
"""
model, x, obj = self._create_model()
status = model.Solve()
if status == model.OPTIMAL or status == model.FEASIBLE:
self._sol = [x[j].solution_value() for j in range(len(x))]
self._obj_val = obj.Value()
return status
def get_sol(self):
return self._sol
def get_obj_val(self):
return self._obj_val
最后是生成新节点的方法。
from copy import deepcopy
def _get_children(v: Node, branch_ind: int):
""" 计算分支节点(其中 i = brand_id):
x[i] <= d,
x[i] >= d+1
只需要重新设置lb[i]和ub[i]
"""
d = int(v.get_sol()[branch_ind])
# left child
# Python对象是指针引用,所以用深拷贝
left_child = deepcopy(v)
left_child.ub[branch_ind] = d
# right child
right_child = deepcopy(v)
right_child.lb[branch_ind] = d+1
return left_child, right_child
需要注意的是,上面的实现每次都要独立解一个线性规划,其实是可以加速的。考虑到每次只是新增一个约束,不会破坏对偶可行性。可以采用对偶单纯形法求解(参考《对偶单纯形算法》),这样一来,父问题的对偶可行解可以作为子问题的初始解。
参考文献
[1] Mikhail Lavrov. Lecture 33: The Branch-and-Bound Method, Math 42: Linear Programming, University of Illinois at Urbana-Champaign.

















 5624
5624

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









