






FaceRecognition2: 纯C实现的一个很简单的人脸识别小项目
1、原始图片:

2、灰度化下:

3、均值滤波:

4、 二值图加边缘检测

5、生成积分图(2001年,VJ人脸检测框架。Viola-Jones Objects detection framwork算法,这个对于计算某矩形区域像素个数非常有利)

6、把待检测的人脸区域划分为25个,因为是一个数组,这样分别统计每个区域的像素个数:
x0: 60, y0: 100, x1: 157, y1: 200 width: 228, height: 228
IGmap.data a4: 7979, a3: 4423, a2: 2130, a1: 1407 result: 2833(外层红色方框内像素个数)
x0: 60, y0: 100, x1: 79, y1: 120 width: 228, height: 228
IGmap.data a4: 2345, a3: 2002, a2: 1624, a1: 1407 result: 126(第一排左边第一个小格子)
x0: 79, y0: 100, x1: 98, y1: 120 width: 228, height: 228
IGmap.data a4: 3132, a3: 2598, a2: 2345, a1: 2002 result: 191(第一排左边第二个小格子)
x0: 98, y0: 100, x1: 117, y1: 120 width: 228, height: 228
IGmap.data a4: 3790, a3: 3137, a2: 3132, a1: 2598 result: 119
x0: 117, y0: 100, x1: 136, y1: 120 width: 228, height: 228
IGmap.data a4: 4551, a3: 3703, a2: 3790, a1: 3137 result: 195
x0: 136, y0: 100, x1: 155, y1: 120 width: 228, height: 228
IGmap.data a4: 5319, a3: 4350, a2: 4551, a1: 3703 result: 121
x0: 60, y0: 120, x1: 79, y1: 140 width: 228, height: 228
IGmap.data a4: 2549, a3: 2345, a2: 1800, a1: 1624 result: 28
x0: 79, y0: 120, x1: 98, y1: 140 width: 228, height: 228
IGmap.data a4: 3419, a3: 3132, a2: 2549, a1: 2345 result: 83
x0: 98, y0: 120, x1: 117, y1: 140 width: 228, height: 228
IGmap.data a4: 4106, a3: 3790, a2: 3419, a1: 3132 result: 29
x0: 117, y0: 120, x1: 136, y1: 140 width: 228, height: 228
IGmap.data a4: 4972, a3: 4551, a2: 4106, a1: 3790 result: 105
x0: 136, y0: 120, x1: 155, y1: 140 width: 228, height: 228
IGmap.data a4: 5757, a3: 5319, a2: 4972, a1: 4551 result: 17
x0: 60, y0: 140, x1: 79, y1: 160 width: 228, height: 228
IGmap.data a4: 2722, a3: 2549, a2: 1913, a1: 1800 result: 60
x0: 79, y0: 140, x1: 98, y1: 160 width: 228, height: 228
IGmap.data a4: 3688, a3: 3419, a2: 2722, a1: 2549 result: 96
x0: 98, y0: 140, x1: 117, y1: 160 width: 228, height: 228
IGmap.data a4: 4533, a3: 4106, a2: 3688, a1: 3419 result: 158
x0: 117, y0: 140, x1: 136, y1: 160 width: 228, height: 228
IGmap.data a4: 5482, a3: 4972, a2: 4533, a1: 4106 result: 83
x0: 136, y0: 140, x1: 155, y1: 160 width: 228, height: 228
IGmap.data a4: 6291, a3: 5757, a2: 5482, a1: 4972 result: 24
x0: 60, y0: 160, x1: 79, y1: 180 width: 228, height: 228
IGmap.data a4: 2874, a3: 2722, a2: 2008, a1: 1913 result: 57
x0: 79, y0: 160, x1: 98, y1: 180 width: 228, height: 228
IGmap.data a4: 4043, a3: 3688, a2: 2874, a1: 2722 result: 203
x0: 98, y0: 160, x1: 117, y1: 180 width: 228, height: 228
IGmap.data a4: 5052, a3: 4533, a2: 4043, a1: 3688 result: 164
x0: 117, y0: 160, x1: 136, y1: 180 width: 228, height: 228
IGmap.data a4: 6190, a3: 5482, a2: 5052, a1: 4533 result: 189
x0: 136, y0: 160, x1: 155, y1: 180 width: 228, height: 228
IGmap.data a4: 7121, a3: 6291, a2: 6190, a1: 5482 result: 122
x0: 60, y0: 180, x1: 79, y1: 200 width: 228, height: 228
IGmap.data a4: 3047, a3: 2874, a2: 2130, a1: 2008 result: 51
x0: 79, y0: 180, x1: 98, y1: 200 width: 228, height: 228
IGmap.data a4: 4405, a3: 4043, a2: 3047, a1: 2874 result: 189
x0: 98, y0: 180, x1: 117, y1: 200 width: 228, height: 228
IGmap.data a4: 5580, a3: 5052, a2: 4405, a1: 4043 result: 166
x0: 117, y0: 180, x1: 136, y1: 200 width: 228, height: 228
IGmap.data a4: 6851, a3: 6190, a2: 5580, a1: 5052 result: 133
x0: 136, y0: 180, x1: 155, y1: 200 width: 228, height: 228
IGmap.data a4: 7863, a3: 7121, a2: 6851, a1: 6190 result: 81

运行效果图:
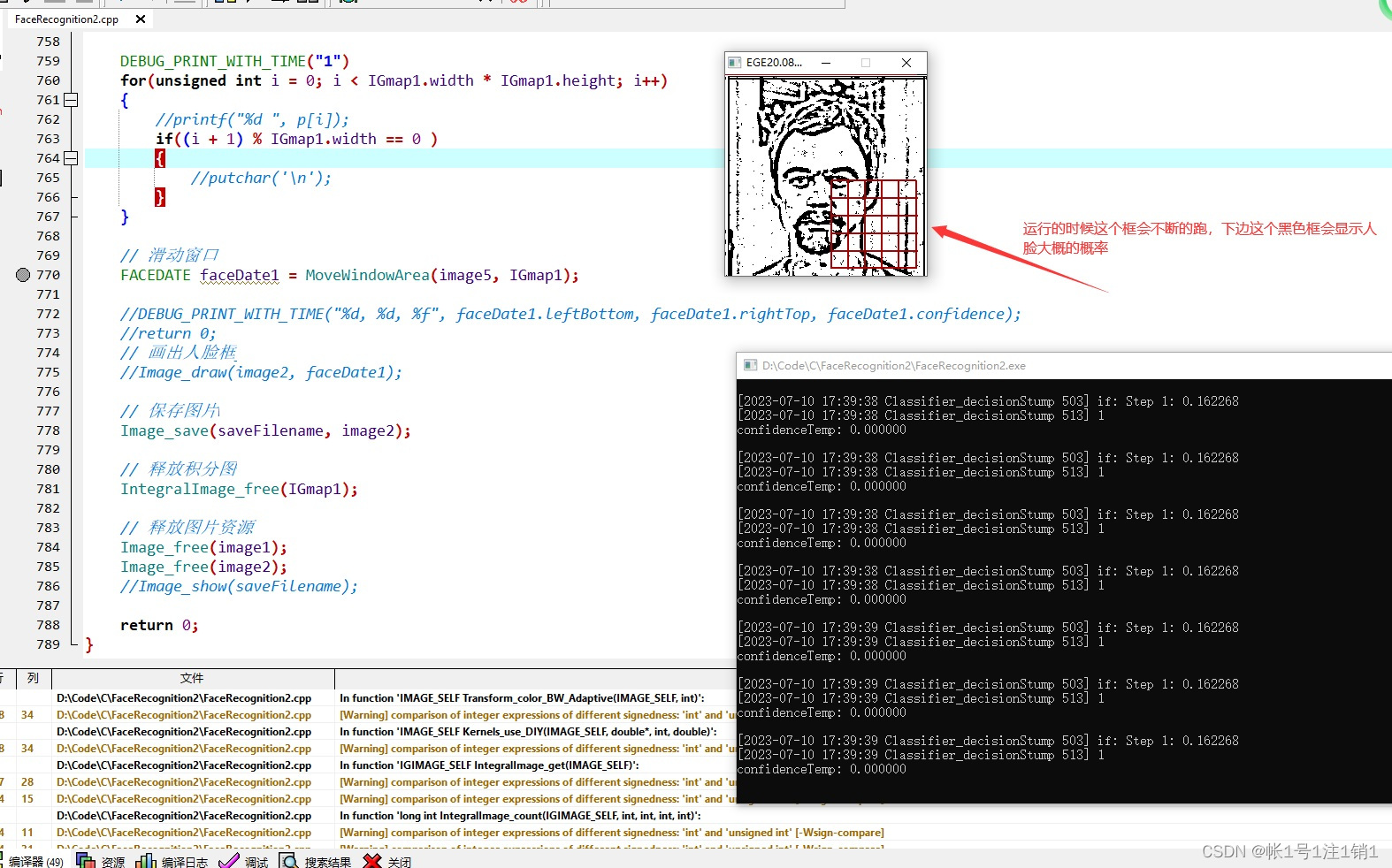
比如,这里是左边眼睛跟人中的比值(d1/d2),和左边眼睛跟人中像素的比值(d3/d2),正常人脸,眼睛区域比人中像素会多些 (如上图所示)
//2、两只眼睛,与人中的比例,正常来说,眼睛比人中的像素点多些
double d1 = (double)(Areas[0] + Areas[1] + Areas[5] + Areas[6]);
double d2 = (double)(Areas[2] + Areas[7]);
double d3 = (double)(Areas[3] + Areas[4] + Areas[8] + Areas[9]);
DEBUG_PRINT_WITH_TIME("if: Step 2: %f, %f", d1 / d2 , d3 / d2);
if (d1 / d2 < 2.6 || d3 / d2 < 2.6)
{
DEBUG_PRINT_WITH_TIME("1");
return 1;
}当前还不能在图片中滑动窗口,检测窗口不断变化,这个其实也是需要测试参数的,因为图片中人脸大小是不固定的。
代码(从这里借鉴了不少,但发现原博客有些小问题,测试了一两天):
#include<stdio.h>
#include<stdlib.h>
#include<Windows.h>
#include<windef.h>
#include<math.h>
#include<string.h>
#include <graphics.h>
#include "Global.h"
int FaceCount = 0;
int angle = 0;
typedef enum
{
FACE_RECOGNITION_STEP_1 = 0,
FACE_RECOGNITION_STEP_2_1,
FACE_RECOGNITION_STEP_2_2,
FACE_RECOGNITION_STEP_3_1,
FACE_RECOGNITION_STEP_3_2,
FACE_RECOGNITION_STEP_4_1,
FACE_RECOGNITION_STEP_4_2,
FACE_RECOGNITION_STEP_5,
FACE_RECOGNITION_STEP_6,
FACE_RECOGNITION_STEP_7,
FACE_RECOGNITION_STEP_8,
FACE_RECOGNITION_STEP_9,
FACE_RECOGNITION_STEP_MAX,
}FACE_RECOGNITION_STEP;
// 获取文件的后缀名
char* GetFlieExta(char* filename)
{
int fileLen = strlen(filename);
int exLen = 0;
char *fileExta = (char *)malloc(255);
memset(fileExta, 0, 255);
for (int i = fileLen-1; i > 0; i--)
if (filename[i] == '.')
{
exLen = fileLen - i;
break;
}
strncpy(fileExta, filename + fileLen - exLen, exLen);
return fileExta;
}
// BGRA颜色结构体
typedef struct tagBGRA
{
unsigned char blue; // 该颜色的蓝色分量 (值范围为0-255)
unsigned char green; // 该颜色的绿色分量 (值范围为0-255)
unsigned char red; // 该颜色的红色分量 (值范围为0-255)
unsigned char transparency; // 透明度,在bmp中是保留值,无实际效果
}BGRA, * PBGRA;
// 图像结构体
typedef struct tagIMAGE_SELF
{
unsigned int width;
unsigned int height;
BGRA* data;
}IMAGE_SELF, * PIMAGE_SELF;
// BMP文件的处理
// BMP文件头结构体
typedef struct tagBITMAP_HEAD_INFO
{
/* bmp文件头的信息,有#的是重点!!*/
// bmp文件头
unsigned short bfType; // 0x424D,即BM字符串,表明是bmp格式文件
unsigned int bfSize; // ###总的bmp文件大小 以字节为单位
unsigned short bfReserved1; // 保留,必须设置为0
unsigned short bfReserved2; // 保留,必须设置为0
unsigned int bfOffBits; // ###总的bmp头部的大小(包括位图信息头),即到像素数据的偏移
// 位图信息头
unsigned int biSize; // 位图信息头的大小
unsigned int biWidth; // ###图像的宽
int biHeight; // ###图像的高
unsigned short biPlanes; // 颜色平面数,即调色盘数,恒等于1
unsigned short biBitCount; // ###图片颜色的位数,一般为32
unsigned int biCompression; // 说明图象数据压缩的类型,0为不压缩
unsigned int biSizeImage; // 像素数据所占大小,因为使用BI_RGB,所以设置为0
unsigned int biXPelsPerMeter; // 说明水平分辨率,缺省为0
unsigned int biYPelsPerMeter; // 说明垂直分辨率,缺省为0
unsigned int biClrUsed; // 说明本位图实际使用调色盘的颜色索引数,0表示全部
unsigned int biClrImportant; // 说明本位图重要调色盘的颜色索引数,0表示全都重要
}BITMAP_HEAD_INFO,*PBITMAP_HEAD_INFO;
// 加载BMP图片
IMAGE_SELF *Image_bmp_load(char* filename)
{
IMAGE_SELF *pimageOld;
BITMAP_HEAD_INFO bmpHeadInfo;
FILE* fp;
pimageOld = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF));
DEBUG_PRINT_WITH_TIME("filename: %s", filename);
if ((fp = fopen(filename, "rb")) == NULL)
{
printf("打开%s文件失败!\n", filename);
exit(0);
}
// 读取bmp头部
// bmp文件头
fread(&bmpHeadInfo.bfType, 1, sizeof(bmpHeadInfo.bfType), fp);
fread(&bmpHeadInfo.bfSize, 1, sizeof(bmpHeadInfo.bfSize), fp);
fread(&bmpHeadInfo.bfReserved1, 1, sizeof(bmpHeadInfo.bfReserved1), fp);
fread(&bmpHeadInfo.bfReserved2, 1, sizeof(bmpHeadInfo.bfReserved2), fp);
fread(&bmpHeadInfo.bfOffBits, 1, sizeof(bmpHeadInfo.bfOffBits), fp);
// 位图信息头
fread(&bmpHeadInfo.biSize, 1, sizeof(bmpHeadInfo.biSize), fp);
fread(&bmpHeadInfo.biWidth, 1, sizeof(bmpHeadInfo.biWidth), fp);
fread(&bmpHeadInfo.biHeight, 1, sizeof(bmpHeadInfo.biHeight), fp);
fread(&bmpHeadInfo.biPlanes, 1, sizeof(bmpHeadInfo.biPlanes), fp);
fread(&bmpHeadInfo.biBitCount, 1, sizeof(bmpHeadInfo.biBitCount), fp);
fread(&bmpHeadInfo.biCompression, 1, sizeof(bmpHeadInfo.biCompression), fp);
fread(&bmpHeadInfo.biSizeImage, 1, sizeof(bmpHeadInfo.biSizeImage), fp);
fread(&bmpHeadInfo.biXPelsPerMeter, 1, sizeof(bmpHeadInfo.biXPelsPerMeter), fp);
fread(&bmpHeadInfo.biYPelsPerMeter, 1, sizeof(bmpHeadInfo.biYPelsPerMeter), fp);
fread(&bmpHeadInfo.biClrUsed, 1, sizeof(bmpHeadInfo.biClrUsed), fp);
fread(&bmpHeadInfo.biClrImportant, 1, sizeof(bmpHeadInfo.biClrImportant), fp);
//DEBUG_PRINT_WITH_TIME("bfType: %d, bfSize: %d, bfOffBits: %d", bmpHeadInfo.bfType, bmpHeadInfo.bfSize, bmpHeadInfo.bfOffBits)
//DEBUG_PRINT_WITH_TIME("bfReserved1: %d, bfReserved2: %d", bmpHeadInfo.bfReserved1, bmpHeadInfo.bfReserved2)
DEBUG_PRINT_WITH_TIME("biWidth: %d, Height: %d", bmpHeadInfo.biWidth, bmpHeadInfo.biHeight)
if (bmpHeadInfo.biHeight < 0)
{
DEBUG_PRINT_WITH_TIME("BMP Height is negative...")
exit(0);
}
// 读取bmp位图数据
BGRA* bgra = (BGRA*)malloc(sizeof(BGRA) * (bmpHeadInfo.biWidth * bmpHeadInfo.biHeight));
fseek(fp, bmpHeadInfo.bfOffBits, SEEK_SET);
if (bmpHeadInfo.biBitCount == 32)
{
for (unsigned int i = 0; i < bmpHeadInfo.biWidth * bmpHeadInfo.biHeight; i++)
fread(&bgra[i], 1, sizeof(BGRA), fp);
}
else if (bmpHeadInfo.biBitCount == 24)
{
// 计算每行补几个字节零
int k = 4 * (3 * bmpHeadInfo.biWidth / 4 + 1) - 3 * bmpHeadInfo.biWidth;
for (unsigned int i = 0; i < bmpHeadInfo.biWidth * bmpHeadInfo.biHeight; i++)
{
if (k != 4 && (ftell(fp)- 54 + k ) % (3 * bmpHeadInfo.biWidth + k)==0)
fseek(fp, ftell(fp) + k, SEEK_SET);
fread(&bgra[i].blue, 1, sizeof(unsigned char), fp);
fread(&bgra[i].green, 1, sizeof(unsigned char), fp);
fread(&bgra[i].red, 1, sizeof(unsigned char), fp);
bgra[i].transparency = (unsigned char)0xFF;
}
}
pimageOld->data = bgra;
pimageOld->width = bmpHeadInfo.biWidth;
pimageOld->height = bmpHeadInfo.biHeight;
fclose(fp);
return pimageOld;
}
// 保存BMP图片
void Image_bmp_save(char* filename, IMAGE_SELF *imageOld)
{
FILE* fp = fopen(filename, "wb");
unsigned short bfType = 0x4D42; // 0x424D,即BM字符串,表明是bmp格式文件
unsigned int bfSize = imageOld->width * imageOld->height * 4 + 54; // ###总的bmp文件大小 以字节为单位
unsigned short bfReserved1 = 0; // 保留,必须设置为0
unsigned short bfReserved2 = 0; // 保留,必须设置为0
unsigned int bfOffBits = 54; // ###总的bmp头部的大小(包括位图信息头),即到像素数据的偏移
unsigned int biSize = 40; // 位图信息头的大小
unsigned int biWidth = imageOld->width; // ###图像的宽
unsigned int biHeight = imageOld->height; // ###图像的高
unsigned short biPlanes = 1; // 颜色平面数,即调色盘数,恒等于1
unsigned short biBitCount = 32; // ###图片颜色的位数,一般为32
unsigned int biCompression = 0; // 说明图象数据压缩的类型,0为不压缩
unsigned int biSizeImage = 0; // 像素数据所占大小,因为使用BI_RGB,所以设置为0
unsigned int biXPelsPerMeter = 0; // 说明水平分辨率,缺省为0
unsigned int biYPelsPerMeter = 0; // 说明垂直分辨率,缺省为0
unsigned int biClrUsed = 0; // 说明本位图实际使用调色盘的颜色索引数,0表示全部
unsigned int biClrImportant = 0; // 说明本位图重要调色盘的颜色索引数,0表示全都重要
fwrite(&bfType, 2, 1, fp);
fwrite(&bfSize, 4, 1, fp);
fwrite(&bfReserved1, 2, 1, fp);
fwrite(&bfReserved2, 2, 1, fp);
fwrite(&bfOffBits, 4, 1, fp);
fwrite(&biSize, 4, 1, fp);
fwrite(&biWidth, 4, 1, fp);
fwrite(&biHeight, 4, 1, fp);
fwrite(&biPlanes, 2, 1, fp);
fwrite(&biBitCount, 2, 1, fp);
fwrite(&biCompression, 4, 1, fp);
fwrite(&biSizeImage, 4, 1, fp);
fwrite(&biXPelsPerMeter, 4, 1, fp);
fwrite(&biYPelsPerMeter, 4, 1, fp);
fwrite(&biClrUsed, 4, 1, fp);
fwrite(&biClrImportant, 4, 1, fp);
fwrite(imageOld->data, sizeof(BGRA) * imageOld->width * imageOld->height, 1, fp);
fclose(fp);
}
// 加载图片
IMAGE_SELF *Image_load(char* filename)
{
IMAGE_SELF *im;
//char* fileEx= GetFlieExta(filename);
//DEBUG_PRINT_WITH_TIME("fileEx: %s", fileEx);
//if (strcmp(fileEx, ".bmp") == 0)
im = Image_bmp_load(filename);
return im;
}
char OutputFileCount = '1';
// 保存图片
void Image_save(char* filename, IMAGE_SELF *imageOld)
{
char* fileEx = GetFlieExta(filename);
filename[strlen(filename) - 5] = OutputFileCount++;
if (strcmp(fileEx, ".bmp") == 0)
Image_bmp_save(filename, imageOld);
}
// 释放图像结构体
void Image_free(IMAGE_SELF *imageOld)
{
free(imageOld->data);
free(imageOld);
}
#define GRAY_MODE_WEIGHT 1 // 加权法(推荐使用)
// 彩色图转灰度图
IMAGE_SELF *Transform_color_grayscale(IMAGE_SELF *imageOld, int grayscale_mode)
{
int color = 0;
IMAGE_SELF *imageNew;
imageNew = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF));
imageNew->width = imageOld->width;
imageNew->height = imageOld->height;
imageNew->data = (BGRA*)malloc(sizeof(BGRA) * imageOld->width * imageOld->height);
switch (grayscale_mode)
{
case GRAY_MODE_WEIGHT:
{
for (unsigned int i = 0; i < imageOld->width * imageOld->height; i++)
{
color = (imageOld->data[i].blue * 114 + imageOld->data[i].green * 587 + imageOld->data[i].red * 299) / 1000;
imageNew->data[i].blue = color;
imageNew->data[i].green = color;
imageNew->data[i].red = color;
}
break;
}
default: DEBUG_PRINT_WITH_TIME("error: switch default branch....");
}
return imageNew;
}
// 二值图(自适应阈值法,areaSize=25较合适,当图片线条多且密时,不推荐使用)
IMAGE_SELF *Transform_color_BW_Adaptive(IMAGE_SELF *imageOld, int areaSize)
{
IMAGE_SELF *imageNew;
imageNew = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF) );
imageNew->width = imageOld->width;
imageNew->height = imageOld->height;
// areaSize为区域的大小,区域越大,效果图的细节越好,areaSize=25较合适
BGRA* bgra = (BGRA*)malloc(sizeof(BGRA) * imageOld->width * imageOld->height);
int* p = (int*)malloc(sizeof(int) * areaSize); // p->position 位置坐标
int k = (int)(sqrt((double)areaSize)) / 2; // 重合区域边长的一半
for (unsigned int i = 0; i < imageOld->width * imageOld->height; i++)
{
// 计算与卷积和对应重合区域的坐标
int t = 0; // 记录p的下标
for (int n = k; n >= -k; n--)
for (int m = -k; m <= k; m++)
{
p[t] = ((i % imageOld->width) + m) + (i / imageOld->width + n) * imageOld->width;
t++;
}
// 判断是否越界
for (int j = 0; j < areaSize; j++)
if (p[j] < 0 || p[j] >= imageOld->width * imageOld->height)
p[j] = i;
unsigned int color = 0;
for (int j = 0; j < areaSize; j++)
color += imageOld->data[p[j]].blue;
color /= areaSize;
if (imageOld->data[i].blue >= color)
bgra[i].blue = 255;
else
bgra[i].blue = 0;
bgra[i].green = bgra[i].blue;
bgra[i].red = bgra[i].blue;
}
free(p);
imageNew->data = bgra;
return imageNew;
}
// 判断像素值的范围
unsigned char Tool_RBG(int BRRA)
{
if (BRRA > 255)
return (unsigned char)255;
else if (BRRA < 0)
return (unsigned char)0;
else
return (unsigned char)BRRA;
}
// 卷积操作(自定义)
IMAGE_SELF *Kernels_use_DIY(IMAGE_SELF *imageOld, double* kernels, int areaSize, double modulus)
{
IMAGE_SELF *imageNew;
imageNew = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF) );
imageNew->width = imageOld->width;
imageNew->height = imageOld->height;
imageNew->data = (BGRA*)malloc(sizeof(BGRA) * imageOld->width * imageOld->height);
memcpy(imageNew->data, imageOld->data, sizeof(BGRA) * imageOld->width * imageOld->height);
// kernels卷积核
// areaSize区域的大小
// modulus最后乘的系数
BGRA* bgra = (BGRA*)malloc(sizeof(BGRA) * imageOld->width * imageOld->height);
int* p = (int*)malloc(sizeof(int) * areaSize); // p->position 位置坐标
int k = (int)(sqrt((double)areaSize)) / 2; // 重合区域边长的一半
for (unsigned int i = 0; i < imageOld->width * imageOld->height; i++)
{
// 计算与卷积和对应重合区域的坐标
int t = 0; // 记录p的下标
for(int n = k; n >= -k; n--)
for (int m = -k; m <= k; m++)
p[t] = ((i % imageOld->width) + m) + (i / imageOld->width + n) * imageOld->width, t++;
// 判断是否越界
for (int j = 0; j < areaSize; j++)
if (p[j] < 0 || p[j] >= imageOld->width * imageOld->height)
p[j] = i;
// 相乘相加
int blue = 0, green = 0, red = 0;
for (int j = 0; j < areaSize; j++)
{
blue += imageOld->data[p[j]].blue * kernels[j];
green += imageOld->data[p[j]].green * kernels[j];
red += imageOld->data[p[j]].red * kernels[j];
}
bgra[i].blue = Tool_RBG(blue * modulus);
bgra[i].green = Tool_RBG(green * modulus);
bgra[i].red = Tool_RBG(red * modulus);
}
free(p);
imageNew->data = bgra;
return imageNew;
}
// 均值滤波卷积核
double KERNELS_Wave_Average[25] =
{
1, 1, 1, 1, 1,
1, 1, 1, 1, 1,
1, 1, 1, 1, 1,
1, 1, 1, 1, 1,
1, 1, 1, 1, 1
};
// 均值滤波
IMAGE_SELF *Wavefiltering_Average(IMAGE_SELF *imageOld)
{
return Kernels_use_DIY(imageOld, KERNELS_Wave_Average, 25, 1.0 / 25);
}
// 积分图结构体
typedef struct tagIGIMAGE_SELF
{
unsigned int width;
unsigned int height;
unsigned int *data;
}IGIMAGE_SELF, *PIGIMAGE_SELF;
typedef struct tagEXPECTANT_ITEM
{
float ExpectantValue; //期望值
int Type; //1: 大于,2:小于
char Note[100]; //注释
}EXPECTANT_ITEM;
EXPECTANT_ITEM gExpectants[FACE_RECOGNITION_STEP_MAX];
// 图像的任意角度的旋转
IMAGE_SELF *Transform_shape_whirl(IMAGE_SELF *imageOld, float angle)
{
// 转角度换成弧度
angle = PI * angle / 180;
IMAGE_SELF *imageNew;
imageNew = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF) );
//imageNew->width = imageOld->width;
//imageNew->height = imageOld->height;
//imageNew->data = (BGRA*)malloc(sizeof(BGRA) * imageOld->width * imageOld->height);
float cosnum = (float)cos(angle);
float sinnum = (float)sin(angle);
// 计算原图的四个角的坐标
int fx2 = imageOld->width - 1;
int fy2 = 0;
int fx3 = 0;
int fy3 = imageOld->height - 1;
int fx4 = imageOld->width - 1;
int fy4 = imageOld->height - 1;
// 计算旋转后的图像四个角的坐标
int nx1 = 0;
int ny1 = 0;
int nx2 = (int)(fx2 * cosnum + fy2 * sinnum);
int ny2 = (int)(fy2 * cosnum - fx2 * sinnum);
int nx3 = (int)(fx3 * cosnum + fy3 * sinnum);
int ny3 = (int)(fy3 * cosnum - fx3 * sinnum);
int nx4 = (int)(fx4 * cosnum + fy4 * sinnum);
int ny4 = (int)(fy4 * cosnum - fx4 * sinnum);
// 计算旋转后的图像的宽和高
unsigned int width = abs(max(max(nx1, nx2), max(nx3, nx4))) + abs(min(min(nx1, nx2), min(nx3, nx4))) + 1;
unsigned int hight = abs(max(max(ny1, ny2), max(ny3, ny4))) + abs(min(min(ny1, ny2), min(ny3, ny4))) + 1;
// 计算旋转后的图像到第一象限的位置偏移
int bx = abs(min(min(nx1, nx2), min(nx3, nx4)));
int by = abs(min(min(ny2, ny3), ny4));
// 申请并初始化内存空间
BGRA* bgra = (BGRA*)calloc(width * hight, sizeof(BGRA));
for (unsigned int i = 0; i < imageOld->width * imageOld->height; i++)
{
// 注意(int)放的位置,不能随便移动,因为y可能为负的小数
unsigned int k = ((i % imageOld->width) * cosnum + (i / imageOld->width) * sinnum + bx) + (int)((i / imageOld->width) * cosnum - (i % imageOld->width) * sinnum + by) * width;
// 判断是否越界
if (k >= width * hight)
k = width * hight - 1;
bgra[k].blue = imageOld->data[i].blue;
bgra[k].green = imageOld->data[i].green;
bgra[k].red = imageOld->data[i].red;
bgra[k].transparency = 255;
}
// 用邻近的像素填充空白区域
for (unsigned int i = 0; i < width * hight; i++)
{
if (bgra[i].transparency != 255)
{
bgra[i].blue = 255;
bgra[i].green = 255;
bgra[i].red = 255;
bgra[i].transparency = 255;
}
}
//free(imageOld.data);
imageNew->data = bgra;
imageNew->width = width;
imageNew->height = hight;
return imageNew;
}
// 获得积分图(在此之前要保证图片是“白底黑字”)
IGIMAGE_SELF *IntegralImage_get(IMAGE_SELF *imageOld)
{
IGIMAGE_SELF *IGmap;
IGmap = (IGIMAGE_SELF *)malloc(sizeof(IGIMAGE_SELF));
unsigned int* array = (unsigned int *)malloc(sizeof(unsigned int) * imageOld->width * imageOld->height);
memset(array, 0, sizeof(int) * imageOld->width * imageOld->height);
int k = 0; // 用于统计每一行的像素个数
for(int height = imageOld->height; height > 0; height--)
{
k = 0;
for(int width = 0; width < imageOld->width; width++)
{
int temp = imageOld->data[(height - 1) * imageOld->width + width].blue;
if(temp == 0)
{
k++;
}
if (temp == 0)
{
//printf("y:");
}
else
{
//printf("n:");
}
int heightTemp = imageOld->height - height;
if (height == imageOld->height)
{
array[width] = k;
}
else
{
array[heightTemp * imageOld->width + width] = array[(heightTemp - 1) * imageOld->width + width] + k;
//printf("%3d ", array[heightTemp * imageOld.width + width]);
}
}
//printf("\n");
//Sleep(1000);
//pause();
//DEBUG_PRINT_WITH_TIME("height: %d, k: %d", height, k);
}
IGmap->data = array;
IGmap->width = imageOld->width;
IGmap->height = imageOld->height;
return IGmap;
}
// 计算积分区域像素个数
//int IntegralImage_count(IGIMAGE_SELF IGmap, int x0, int y0, int x1, int y1)
long IntegralImage_count(IGIMAGE_SELF *IGmap, int x0, int y0, int x1, int y1)
{
long a1, a2, a3, a4;
//int leftBottom = x0 + y1 *IGmap.width;
//int rightTop = x1 + y0 *IGmap.width;
if(x0 > IGmap->width || x1 > IGmap->width || y1 > IGmap->height || y0 > IGmap->height)
{
DEBUG_PRINT_WITH_TIME("x0: %d, y0: %d, x1: %d, y1: %d width: %d, height: %d", x0, y0, x1, y1, IGmap->width, IGmap->height)
return -1;
}
//DEBUG_PRINT_WITH_TIME("x0: %ld, y0: %ld, x1: %ld, y1: %ld width: %d, height: %d", x0, y0, x1, y1, IGmap.width, IGmap.height)
a1 = y0 * IGmap->width + x0;
a2 = y1 * IGmap->width + x0;
a3 = y0 * IGmap->width + x1;
a4 = y1 * IGmap->width + x1;
//DEBUG_PRINT_WITH_TIME("a4: %u, a3: %u, a2: %u, a1: %u", a4, a3, a2, a1)
// 判断是否越界
if (a1 < 0)
a1 = 0;
if (a2 < 0)
a2 = 0;
if (a3 < 0)
a3 = 0;
if (a3 > IGmap->width * IGmap->height - 1)
a3 = a4;
long result = IGmap->data[a4] + IGmap->data[a1] - IGmap->data[a3] - IGmap->data[a2];
//DEBUG_PRINT_WITH_TIME("IGmap.data a4: %u, a3: %u, a2: %u, a1: %u result: %u\n", IGmap.data[a4], IGmap.data[a3], IGmap.data[a2], IGmap.data[a1], result)
// 计算区域中的像素数
return result;
}
// 释放积分图结构体
void IntegralImage_free(IGIMAGE_SELF *IGimage)
{
free(IGimage->data);
free(IGimage);
}
// 单分支决策树分类器
double Classifier_decisionStump(IGIMAGE_SELF *IGmap, int x0, int y0, int x1, int y1, float *parameters)
{
//DEBUG_PRINT_WITH_TIME("x0: %d, y0: %d, x1: %d, y1: %d\n", x0, y0, x1, y1);
int areaW = abs(x0-x1);
int areaH = abs(y0-y1);
int xStep = abs(x0-x1)/5;
int yStep = abs(y0-y1)/5;
long Areas[25] = {0};
double ReturnFlag = 0;
for(int j = 0; j < 5; j++)
{
for(int i = 0; i < 5; i++)
{
Areas[j * 5 + i] = IntegralImage_count(IGmap, x0 + i * xStep, y0 + yStep * j, x0 + (i + 1) * xStep, y0 + yStep * (j + 1));
//DEBUG_PRINT_WITH_TIME("j: %d, i: %d, num: %d\n", j, i, num);
}
}
for(int i=0;i<25;i++)
{
//printf("%d: %d, ", i, Areas[i]);
}
// 计算25个区域的像素个数
int w_all = IntegralImage_count(IGmap, x0, y0, x1, y1);
//DEBUG_PRINT_WITH_TIME("if: Step 1 计算25个区域的像素个数占面积像素比( > 0.19) : %f", (double)w_all / (areaW * areaH));
parameters[FACE_RECOGNITION_STEP_1] = (float)w_all / (areaW * areaH);
if ((double)w_all / (areaW * areaH) < gExpectants[FACE_RECOGNITION_STEP_1].ExpectantValue)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_1;
return ReturnFlag;
}
//2、两只眼睛,与人中的比例,正常来说,眼睛比人中的像素点多些
float d1 = (float)(Areas[0] + Areas[1] + Areas[5] + Areas[6]);
float d2 = (float)(Areas[2] + Areas[7]);
float d3 = (float)(Areas[3] + Areas[4] + Areas[8] + Areas[9]);
//DEBUG_PRINT_WITH_TIME("if: Step 2 两只眼睛,与人中的比例,正常来说,眼睛比人中的像素点多些( > 2.6) : %f, %f", d1 / d2 , d3 / d2);
parameters[FACE_RECOGNITION_STEP_2_1] = d1 / d2;
parameters[FACE_RECOGNITION_STEP_2_2] = d1 / d2;
float temp = gExpectants[FACE_RECOGNITION_STEP_2_1].ExpectantValue;
if (d1 / d2 < temp || d3 / d2 < temp)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_2_1;
return ReturnFlag;
}
//3、鼻子的像素正常比鼻子两边像素多些
d1 = (double)(Areas[12] + Areas[17]);
d2 = (double)(Areas[11] + Areas[16]);
float d4 = (double)(Areas[13] + Areas[18]);
//DEBUG_PRINT_WITH_TIME("if: Step 3 鼻子的像素正常比鼻子两边像素多些( > 1): %f, %f", d1 / d2 , d3 / d4);
parameters[FACE_RECOGNITION_STEP_3_1] = d1 / d2;
parameters[FACE_RECOGNITION_STEP_3_2] = d3 / d4;
temp = gExpectants[FACE_RECOGNITION_STEP_3_1].ExpectantValue;
if (d1 / d2 < temp || d1 / d4 < temp)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_3_1;
return ReturnFlag;
}
//4、眼睛的像素比眼睛下边的脸像素少些,两边都是,因为考虑到还有胡子
d1 = (double)(Areas[0] + Areas[1] + Areas[5] + Areas[6]);
d2 = (double)(Areas[10] + Areas[11] + Areas[15]);
d3 = (double)(Areas[3] + Areas[4] + Areas[8] + Areas[9]);
d4 = (double)(Areas[13] + Areas[14] + Areas[19]);
//DEBUG_PRINT_WITH_TIME("if: Step 4 眼睛的像素比眼睛下边的脸像素少些,两边都是,因为考虑到还有胡子( > 1.3) : %f, %f", d1 / d2 , d3 / d4);
parameters[FACE_RECOGNITION_STEP_4_1] = d1 / d2;
parameters[FACE_RECOGNITION_STEP_4_2] = d3 / d4;
temp = gExpectants[FACE_RECOGNITION_STEP_4_1].ExpectantValue;
if (d1 / d2 < temp || d3 / d4 < temp)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_4_1;
return ReturnFlag;
}
d1 = 0;
d2 = 0;
for (int i = 0; i < 10; i++)
{
d1 += Areas[i];
d2 += Areas[15 + i];
}
//5、上边脸跟嘴和下巴像素的比值
//d1 = (double)(Areas[0] + Areas[1] + Areas[2] + Areas[3] + Areas[4] + Areas[5] + Areas[6] + Areas[7] + Areas[8] + Areas[9]);
//d2 = (double)(Areas[15] + Areas[16] + Areas[17] + Areas[18] + Areas[19] + Areas[20] + Areas[21] + Areas[22] + Areas[23] + Areas[24]);
//DEBUG_PRINT_WITH_TIME("if: Step 5 上边脸跟嘴和下巴像素的比值( > 2): %f", d1 / d2);
parameters[FACE_RECOGNITION_STEP_5] = d1 / d2;
if ( d1 / d2 > gExpectants[FACE_RECOGNITION_STEP_5].ExpectantValue)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_5;
return ReturnFlag;
}
//6、眼睛和嘴巴所占的像素比值不能太小
d1 = (double)(Areas[0] + Areas[1] + Areas[3] + Areas[4] + Areas[5] + Areas[6] + Areas[8] + Areas[9]
+ Areas[12] + Areas[16] + Areas[17] + Areas[18] + Areas[22]);
//DEBUG_PRINT_WITH_TIME("if: Step 6 眼睛和嘴巴所占的像素比值不能太小( > 0.5) : %f", d1 / w_all);
parameters[FACE_RECOGNITION_STEP_6] = d1 / d2;
if (d1/ w_all < gExpectants[FACE_RECOGNITION_STEP_6].ExpectantValue)
{
//DEBUG_PRINT_WITH_TIME("if return");
ReturnFlag = FACE_RECOGNITION_STEP_6;
return ReturnFlag;
}
//7、脸左边跟脸右边的比值不能差太多
d1 = (double)(Areas[0] + Areas[1] + Areas[5] + Areas[6] + Areas[10] + Areas[11] + Areas[15] + Areas[16] + Areas[20] + Areas[21]);
d2 = (double)(Areas[3] + Areas[4] + Areas[8] + Areas[9] + Areas[13] + Areas[14] + Areas[18] + Areas[19] + Areas[23] + Areas[24]);
double PCT_1 = (double)min(d1, d2)/ max(d1, d2);
parameters[FACE_RECOGNITION_STEP_7] = PCT_1;
PCT_1 = exp(-3.125 * (PCT_1 - 1) * (PCT_1 - 1)) * 100;
//8、两只眼睛的比值不能差太多
d1 = (double)(Areas[0] + Areas[1] + Areas[5] + Areas[6]);
d2 = (double)(Areas[3] + Areas[4] + Areas[8] + Areas[9]);
double PCT_2 = (double)min(d1, d2) / max(d1, d2);
parameters[FACE_RECOGNITION_STEP_8] = PCT_2;
PCT_2 = exp(-3.125 * (PCT_2 - 1) * (PCT_2 - 1)) * 100;
//9、两腮的比值不能差太多
d1 = (double)(Areas[15] + Areas[20]);
d2 = (double)(Areas[19] + Areas[24]);
double PCT_3 = (double)min(d1, d2) / max(d1, d2);
parameters[FACE_RECOGNITION_STEP_9] = PCT_3;
PCT_3 = exp(-3.125 * (PCT_3 - 1) * (PCT_3 - 1)) * 100;
// 计算总的概率
double PCT_all = (PCT_1 + PCT_2 + PCT_3) / 3;
//DEBUG_PRINT_WITH_TIME("PCT_all: %f, PCT_1: %f, PCT_2: %f, PCT_3: %f", PCT_all, PCT_1, PCT_2, PCT_3)
// 1、判断是否为人脸,整个区域有的像素个数占整个区域面积的比例
if (ReturnFlag != 0)
{
return ReturnFlag;
}
else if (PCT_all > 60)
{
return PCT_all;
}
else
{
return -1;
}
}
// 人脸数据结构体
typedef struct tagFACE_RESULT
{
int x0;
int y0;
int x1;
int y1;
float parameters[FACE_RECOGNITION_STEP_MAX];
int angle; //旋转角度
double confidence;
}FACE_RESULT;
int GraphicsInitial(IMAGE_SELF *imageOld)
{
setinitmode(0);
initgraph(imageOld->width * 2, imageOld->height * 2);
setcolor(RED);
setlinewidth(2);
}
//期望值初始化,包含:值是多少,阈值是多少,是大于还是小于,期望值说明
int ExpectantsInitial()
{
gExpectants[FACE_RECOGNITION_STEP_1].ExpectantValue = 0.19;
gExpectants[FACE_RECOGNITION_STEP_1].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_1].Note, "Step 1 计算25个区域的像素个数占面积像素比期望 > ");
gExpectants[FACE_RECOGNITION_STEP_2_1].ExpectantValue = 2.6;
gExpectants[FACE_RECOGNITION_STEP_2_1].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_2_1].Note, "Step 2_1 两只眼睛,与人中的比例,正常来说,眼睛比人中的像素点多些期望 > ");
gExpectants[FACE_RECOGNITION_STEP_2_2].ExpectantValue = 2.6;
gExpectants[FACE_RECOGNITION_STEP_2_2].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_2_2].Note, "Step 2_2 两只眼睛,与人中的比例,正常来说,眼睛比人中的像素点多些期望 > ");
gExpectants[FACE_RECOGNITION_STEP_3_1].ExpectantValue = 1;
gExpectants[FACE_RECOGNITION_STEP_3_1].Type = 1;
strcpy(gExpectants[FACE_RECOGNITION_STEP_3_1].Note, "Step 3_1 鼻子的像素正常比鼻子两边像素多些期望 > ");
gExpectants[FACE_RECOGNITION_STEP_3_2].ExpectantValue = 1;
gExpectants[FACE_RECOGNITION_STEP_3_2].Type = 1;
strcpy(gExpectants[FACE_RECOGNITION_STEP_3_2].Note, "Step 3_2 鼻子的像素正常比鼻子两边像素多些期望 > ");
gExpectants[FACE_RECOGNITION_STEP_4_1].ExpectantValue = 1.3;
gExpectants[FACE_RECOGNITION_STEP_4_1].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_4_1].Note, "Step 4_1 眼睛的像素比眼睛下边的脸像素少些,两边都是,因为考虑到还有胡子期望 > ");
gExpectants[FACE_RECOGNITION_STEP_4_2].ExpectantValue = 1.3;
gExpectants[FACE_RECOGNITION_STEP_4_2].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_4_2].Note, "Step 4_2 眼睛的像素比眼睛下边的脸像素少些,两边都是,因为考虑到还有胡子期望 > ");
gExpectants[FACE_RECOGNITION_STEP_5].ExpectantValue = 2;
gExpectants[FACE_RECOGNITION_STEP_5].Type = 1;
strcpy(gExpectants[FACE_RECOGNITION_STEP_5].Note, "Step 5 上边脸跟嘴和下巴像素的比值期望 < ");
gExpectants[FACE_RECOGNITION_STEP_6].ExpectantValue = 0.6;
gExpectants[FACE_RECOGNITION_STEP_6].Type = 2;
strcpy(gExpectants[FACE_RECOGNITION_STEP_6].Note, "Step 6 眼睛和嘴巴所占整个区域总的像素比值不能太小期望 > ");
gExpectants[FACE_RECOGNITION_STEP_7].ExpectantValue = 0;
gExpectants[FACE_RECOGNITION_STEP_7].Type = 0;
strcpy(gExpectants[FACE_RECOGNITION_STEP_7].Note, "Step 7 脸左边跟脸右边的比值不能差太多 ");
gExpectants[FACE_RECOGNITION_STEP_8].ExpectantValue = 0;
gExpectants[FACE_RECOGNITION_STEP_8].Type = 0;
strcpy(gExpectants[FACE_RECOGNITION_STEP_8].Note, "Step 8 两只眼睛的比值不能差太多 ");
gExpectants[FACE_RECOGNITION_STEP_9].ExpectantValue = 0;
gExpectants[FACE_RECOGNITION_STEP_9].Type = 0;
strcpy(gExpectants[FACE_RECOGNITION_STEP_9].Note, "Step 9 两腮的比值不能差太多 ");
return 0;
}
//手动调试模式,用鼠标点击,这样图片太大可以使用这种方法,比较快速测试哪些参数不太合理
int ManualMode(IMAGE_SELF imageOld, IGIMAGE_SELF *IGmap)
{
int x0 = 0;
int y0 = 0;
int x1 = 0;
int y1 = 0;
int DefaultFaceWidth = 97;
int DefaultFaceHeight = 100;
setinitmode(0);
initgraph(imageOld.width, imageOld.height);
setcolor(RED);
setlinewidth(2);
//在画板画出图像,这里其实有优化的空间,当前偷懒整个画板更新
//实际上不需要,只需要更新上次画的红色格子区域就行,当前对性能有点损耗
for(unsigned int i = imageOld.height - 1; i > 0 ; i--)
{
for(unsigned int j = 0; j < imageOld.width; j++)
{
unsigned int point = (imageOld.height - i) * imageOld.width + j;
putpixel(j, i, EGERGB(imageOld.data[point].red,
imageOld.data[point].green,
imageOld.data[point].blue));
}
}
while(1)
{
int ret = mousemsg();
if (! ret)
continue;
mouse_msg m = getmouse();
if (!m.is_down() || !m.is_left())
continue;
x0 = m.x;
y0 = m.y;
x1 = x0 + DefaultFaceWidth;
y1 = y0 + DefaultFaceHeight;
//DEBUG_PRINT_WITH_TIME("x0: %d, y0: %d, x1: %d, y1: %d", x0, y0, x1, y1);
//在画板画出图像,这里其实有优化的空间,当前偷懒整个画板更新
//实际上不需要,只需要更新上次画的红色格子区域就行,当前对性能有点损耗
for(unsigned int i = imageOld.height - y0; i > imageOld.height - y1 ; i--)
{
for(unsigned int j = x0 - 1; j < x0 + 1; j++)
{
unsigned int point = (imageOld.height - i) * imageOld.width + j;
putpixel(j, i, EGERGB(imageOld.data[point].red,
imageOld.data[point].green,
imageOld.data[point].blue));
}
}
//画出当前在运行的方框
rectangle(x0, y0, x1, y1);
//在红色方框里边画5*5个小方框,为了大概看到每个方框像素点个数
int xStep = abs(x0-x1)/5;
int yStep = abs(y0-y1)/5;
for(int j = 1; j < 5; j++)
{
line(x0 + xStep * j, y0, x0 + xStep * j, y1 );
line(x0, y0 + yStep * j, x1, y0 + yStep * j );
}
//记录找到的脸对应的参数,用于未找到正确人脸,查看是哪些参数出了问题,可用于优化
float parameters[FACE_RECOGNITION_STEP_MAX] = {0};
double confidenceTemp = Classifier_decisionStump(IGmap, x0, y0, x1, y1, parameters);
//if (confidenceTemp > 60.2f)
DEBUG_PRINT_WITH_TIME("confidenceTemp: %lf, x0: %d, y0: %d, x1: %d, y1: %d\n", confidenceTemp, x0, y0, x1, y1);
for (int i = 0; i < FACE_RECOGNITION_STEP_MAX; i++)
{
DEBUG_PRINT_WITH_TIME("%s%f,实际: %f", gExpectants[i].Note, gExpectants[i].ExpectantValue, parameters[i]);
}
DEBUG_PRINT_WITH_TIME("\n");
Sleep(10);
}
return 0;
}
//滑动窗口区域(训练用)
int MoveWindowArea(IMAGE_SELF *imageOld, IGIMAGE_SELF *IGmap, FACE_RESULT *FoundFaces)
{
int FaceWidth = 97;
int FaceHeight = 100;
int MoveStepSize = 8;
int x0 = 0;
int y0 = 0;
for(int i = 0; i * MoveStepSize < imageOld->width - FaceWidth; i++) //height
{
x0 += MoveStepSize;
y0 = 0;
for(int j = 0 ; j * MoveStepSize < imageOld->height - FaceHeight; j++)
{
y0 += MoveStepSize;
int x1 = x0 + 97;
int y1 = y0 + 100;
DEBUG_PRINT_WITH_TIME();
//超过阈值,直接跑下一次循环
if(x1 > imageOld->width || y1 > imageOld->height)
{
continue; //TODO
}
//在画板画出图像,这里其实有优化的空间,当前偷懒整个画板更新
//实际上不需要,只需要更新上次画的红色格子区域就行,当前对性能有点损耗
for(unsigned int i = imageOld->height - 1; i > 0 ; i--)
{
for(unsigned int j = 0; j < imageOld->width; j++)
{
unsigned int point = (imageOld->height - i) * imageOld->width + j;
putpixel(j, i, EGERGB(imageOld->data[point].red,
imageOld->data[point].green,
imageOld->data[point].blue));
}
}
//画出当前在运行的方框
rectangle(x0, y0, x1, y1);
//在红色方框里边画5*5个小方框,为了大概看到每个方框像素点个数
int xStep = abs(x0-x1)/5;
int yStep = abs(y0-y1)/5;
for(int j = 1; j < 5; j++)
{
line(x0 + xStep * j, y0, x0 + xStep * j, y1 );
line(x0, y0 + yStep * j, x1, y0 + yStep * j );
}
//记录找到的脸对应的参数,用于未找到正确人脸,查看是哪些参数出了问题,可用于优化
float parameters[FACE_RECOGNITION_STEP_MAX] = {0};
double confidenceTemp = Classifier_decisionStump(IGmap, x0, y0, x1, y1, parameters);
if (confidenceTemp > 60.2f)
{
DEBUG_PRINT_WITH_TIME("FaceCount: %d, confidenceTemp: %lf, x0: %d, y0: %d, x1: %d, y1: %d\n", FaceCount + 1, confidenceTemp, x0, y0, x1, y1);
FoundFaces[FaceCount].x0 = x0;
FoundFaces[FaceCount].x1 = x1;
FoundFaces[FaceCount].y0 = y0;
FoundFaces[FaceCount].y1 = y1;
FoundFaces[FaceCount].angle = angle;
for (int i = 0; i < FACE_RECOGNITION_STEP_MAX; i++)
{
FoundFaces[FaceCount].parameters[i] = parameters[i];
DEBUG_PRINT_WITH_TIME("%s%f,实际: %f", gExpectants[i].Note, gExpectants[i].ExpectantValue, parameters[i]);
}
FaceCount++;
y0 += FaceHeight;
x0 += FaceWidth;
DEBUG_PRINT_WITH_TIME("\n");
//getch();
}
//Sleep(100);
}
Sleep(1);
}
for (int i = 0; i < FaceCount; i++)
{
rectangle(FoundFaces[i].x0, FoundFaces[i].y0, FoundFaces[i].x1, FoundFaces[i].y1);
DEBUG_PRINT_WITH_TIME("FoundFaces: %d, angle: %d: x0: %d, y0: %d, x1: %d, y1: %d", i + 1, angle, FoundFaces[i].x0, FoundFaces[i].y0, FoundFaces[i].x1, FoundFaces[i].y1);
for (int j = 0; j < FACE_RECOGNITION_STEP_MAX; j++)
DEBUG_PRINT_WITH_TIME("%s%f,实际: %f", gExpectants[j].Note, gExpectants[j].ExpectantValue, FoundFaces[i].parameters[j]);
printf("\n");
Sleep(1);
}
// 窗口区域的取值范围
//getch();
//closegraph();
return FaceCount;
}
// 画出人框
void Image_draw(IMAGE_SELF *imageOld, FACE_RESULT *faceResult, int FaceCount)
{
int width = imageOld->width;
int height = imageOld->height;
for (int count = 0; count < FaceCount; count++)
{
int x0 = faceResult[count].x0;
int y0 = faceResult[count].y0;
int x1 = faceResult[count].x1;
int y1 = faceResult[count].y1;
int LineWidth = 4;
y0 = height - y0;
y1 = height - y1;
int temp = y0;
y0 = y1;
y1 = temp;
//竖
for (int i = y0; i < y1; i++)
{
for (int j = 0; j < LineWidth; j++)
{
imageOld->data[i * width + x0 + j].blue = 0;
imageOld->data[i * width + x0 + j].green = 0;
imageOld->data[i * width + x0 + j].red = 200;
imageOld->data[i * width + x1 - j].blue = 0;
imageOld->data[i * width + x1 - j].green = 0;
imageOld->data[i * width + x1 - j].red = 200;
}
}
//横
for (int i = x0; i < x1; i++)
{
for (int j = 0; j < LineWidth; j++)
{
imageOld->data[(y0 + j) * width + i].blue = 0;
imageOld->data[(y0 + j) * width + i].green = 0;
imageOld->data[(y0 + j) * width + i].red = 200;
imageOld->data[(y1 - j) * width + i].blue = 0;
imageOld->data[(y1 - j) * width + i].green = 0;
imageOld->data[(y1 - j) * width + i].red = 200;
}
}
}
}
//积分图保存
int IG_ImageSave(IGIMAGE_SELF *IGmap1, char *OutputFile)
{
IMAGE_SELF *image36;
image36 = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF) );
image36->width = IGmap1->width;
image36->height = IGmap1->height;
image36->data = (BGRA *)malloc(sizeof(BGRA) * IGmap1->width * IGmap1->height);
for (unsigned int i = 0; i < IGmap1->width * IGmap1->height; i++)
{
image36->data[i].red = IGmap1->data[i] % 256;
image36->data[i].green = IGmap1->data[i] / 256 % 256;
image36->data[i].blue = IGmap1->data[i] / 256 / 256 % 256;
image36->data[i].transparency = 0;
//if (i %1000 == 0)
// DEBUG_PRINT_WITH_TIME("w: %d, h: %d, i: %d", image35.width, image35.h, i);
}
Image_save(OutputFile, image36);
DEBUG_PRINT_WITH_TIME("1")
for(unsigned int i = 0; i < IGmap1->width * IGmap1->height; i++)
{
//printf("%d ", IGmap1->data[i]);
if((i + 1) % IGmap1->width == 0 )
{
//putchar('\n');
}
}
}
int IG_ImageWhirl(IGIMAGE_SELF *IGmap1, char *OutputFile)
{
//准备旋转积分图,用于人脸旋转识别测试
//当前准备沿着图像横轴和纵轴中心旋转
IMAGE_SELF *image37;
image37 = (IMAGE_SELF *)malloc(sizeof(IMAGE_SELF) );
if (NULL == image37)
{
DEBUG_PRINT_WITH_TIME("memory allocate failed...")
return -1;
}
int NewWidth = IGmap1->width * 2;
int NewHeight = IGmap1->height * 2;
image37->width = NewWidth;
image37->height = NewHeight;
DEBUG_PRINT_WITH_TIME("memory allocate: %d", 4 * NewWidth * NewWidth)
image37->data = (BGRA *)malloc(4 * NewWidth * NewWidth);
if (NULL == image37->data)
{
DEBUG_PRINT_WITH_TIME("memory allocate failed...")
return -1;
}
int OldHeight = IGmap1->height;
int OldWidth = IGmap1->width;
int OldCenterHeight = OldHeight / 2;
int OldCenterWidth = OldWidth / 2;
int NewCenterWidth = NewWidth / 2;
int NewCenterHeight = NewHeight / 2;
//度数
//double AngleAdd = 45 * PI / 180;
double AngleAdd = 0;
double Angle = 0;
//旋转
//for (int height = 2; height < OldHeight; height++)
for (int height = 0; height < OldHeight; height++)
{
for (int width = 0; width < OldWidth; width++)
//for (int width = 2; width < OldWidth; width++)
{
//当前点到中心点的距离
int HeightTemp = height - OldCenterHeight;
int WidthTemp = width - OldCenterWidth;
int HeightAbsTemp = abs(HeightTemp);
int WidthAbsTemp = abs(WidthTemp);
int Radius = sqrt(HeightAbsTemp * HeightAbsTemp + WidthAbsTemp * WidthAbsTemp);
if(Radius != 0) //半径为0时,计算出来的Angle会有问题
{
Angle = asin((double)WidthAbsTemp / Radius);
}
if (height > OldCenterHeight && width > OldCenterWidth) //第一象限 (0,PI/2)
{
//不用管
}
else if (height >= OldCenterHeight && width <= OldCenterWidth) //第二象限 (PI/2,PI)
{
Angle += PI/2;
}
else if (height <= OldCenterHeight && width <= OldCenterWidth) //第三象限 (PI,3PI/2)
{
Angle += PI;
}
else if (height <= OldCenterHeight && width >= OldCenterWidth) //第四象限 (3PI/2,2PI)
{
Angle += 3 * PI/2;
}
double NewAngle = Angle + AngleAdd;
int NewY, NewX;
if (Angle > 0 && Angle < PI/2 || Angle > PI && Angle < 3*PI/2)
{
//求新的x, y坐标点
NewY = Radius * cos(NewAngle);
NewX = Radius * sin(NewAngle);
}
else
{
NewX = Radius * cos(NewAngle);
NewY = Radius * sin(NewAngle);
}
/*
DEBUG_PRINT_WITH_TIME("width: %d, height: %d, Radius: %d, Angle: %lf, NewAngle: %lf, NewX: %d, NewY: %d",
width,
height,
Radius,
Angle,
NewAngle,
NewX,
NewY)
*/
//沿中心旋转
int location = (NewCenterHeight + NewY) * NewWidth + NewCenterWidth + NewX;
int location2 = height * OldWidth + width;
//DEBUG_PRINT_WITH_TIME("location: %d, location2: %d",
// location,
// location2)
if(location < 0)
{
DEBUG_PRINT_WITH_TIME("location < 0");
break;
}
if(location2 < 0)
{
DEBUG_PRINT_WITH_TIME("location2 < 0");
break;
}
image37->data[location].red = IGmap1->data[location2] % 256;
image37->data[location].green = IGmap1->data[location2] / 256 % 256;
image37->data[location].blue = IGmap1->data[location2] / 256 / 256 % 256;
image37->data[location].transparency = 0;
}
}
Image_save(OutputFile, image37);
}
char InputFile[100] = {0};
char OutputFile[100] = {0};
FileNameInitial()
{
char InputPath[100] = "../Input/";
char OutputPath[100] = "../Output/";
char InputFileName[50] = "InputTest_04.bmp";
char OutputFilename[100] = "_Result00.bmp";
DEBUG_PRINT_WITH_TIME("main start....");
strcpy(InputFile, InputPath);
strcpy(OutputFile, OutputPath);
strcat(InputFile, InputFileName);
strcat(OutputFile, InputFileName);
OutputFile[strlen(OutputFile) - 4] = '_';
strcat(OutputFile, OutputFilename);
}
int main()
{
FileNameInitial();
// 用于处理
IMAGE_SELF *image1 = Image_load(InputFile);
if (image1 == NULL)
{
DEBUG_PRINT_WITH_TIME("readBMP file Abnormal...")
return -1;
}
// 灰度图
IMAGE_SELF *image3 = Transform_color_grayscale(image1, GRAY_MODE_WEIGHT);
Image_save(OutputFile, image3);
// 均值滤波
IMAGE_SELF *image4 = Wavefiltering_Average(image3);
Image_save(OutputFile, image4);
// 二值图加边缘检测
IMAGE_SELF *image5 = Transform_color_BW_Adaptive(image4, 25);
Image_save(OutputFile, image5);
// 积分图
IGIMAGE_SELF *IGmap1 = IntegralImage_get(image5);
IG_ImageSave(IGmap1, OutputFile);
//假设能找到FaceCountExpect张脸
int FaceCountExpect = 1000;
FACE_RESULT *faceResult = (FACE_RESULT *)malloc(FaceCountExpect * sizeof(FACE_RESULT));
memset(faceResult, 0, FaceCountExpect * sizeof(FACE_RESULT));
ExpectantsInitial();
GraphicsInitial(image1);
for (angle = 10; angle < 360; angle += 10)
{
//旋转图像
IMAGE_SELF *image6 = Transform_shape_whirl(image5, angle);
Image_save(OutputFile, image6);
// 旋转图像积分图
IGIMAGE_SELF *IGmap2 = IntegralImage_get(image6);
IG_ImageSave(IGmap2, OutputFile);
// 滑动窗口
FaceCount += MoveWindowArea(image6, IGmap2, faceResult);
Sleep(200);
}
// 画出人脸框
Image_draw(image1, faceResult, FaceCount);
//ManualMode(image5, IGmap1);
// 保存图片
Image_save(OutputFile, image1);
// 释放积分图
IntegralImage_free(IGmap1);
// 释放图片资源
Image_free(image1);
//Image_show(saveFilename);
return 0;
}
新代码测试如下图片的结果如下:


图片旋转后生成的积分图(20230717更新),当前人脸检测出来太多人脸,代码有BUG,需要修复:




当前的积分图是每次旋转10度,一共需要旋转35次,因为0度不需要旋转,但是图片里 是有BUG的,有的图片在旋转的过程已经跑图片外边去了。。。。:

参考:
人脸检测:经典的VJ人脸检测器(类Harr特征,积分图加速法,级联的Adaboost强分类器)_vj算法_cartes1us的博客-CSDN博客














 53
53











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









