







课程链接
【GAMES101-现代计算机图形学入门-闫令琪】 https://www.bilibili.com/video/BV1X7411F744/?p=4&share_source=copy_web&vd_source=8332072dc5586e92174abc96d6e4280f
二维旋转矩阵的补充

第一行的式子,是上节讲到的二维的旋转矩阵(二维的变换不用齐次坐标表示的话,基本就是这种2*2的矩阵表示)
第二行的式子,旋转-θ角。是将第一行的所有θ替换成-θ,然后化简得来的。
-
观察可以发现,旋转-θ的旋转矩阵,就是旋转θ的旋转矩阵的转置。
-
另外也可以,旋转-θ的旋转矩阵,也是旋转θ的旋转矩阵的逆。(第三行的式子。通过矩阵的定义,矩阵转成逆矩阵可知)
-
从而可以得到性质:在旋转里,旋转θ的旋转矩阵的转置 等于 旋转θ的旋转矩阵的逆(在数学上,一个矩阵的逆等于它的转置,这个矩阵就是正交矩阵)
-
如果想要让二维物体沿着相反的方向旋转相同的角度,那么写出一个正向旋转矩阵,然后转置即可。
三维变换的补充
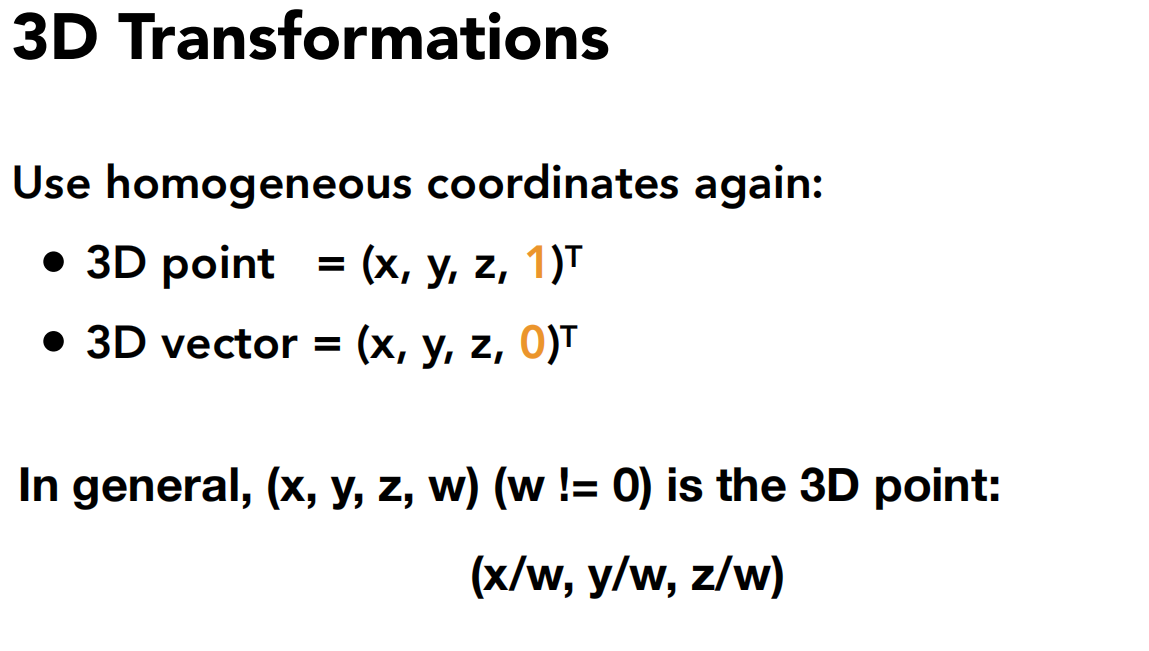
通过升维来表示三维变换。
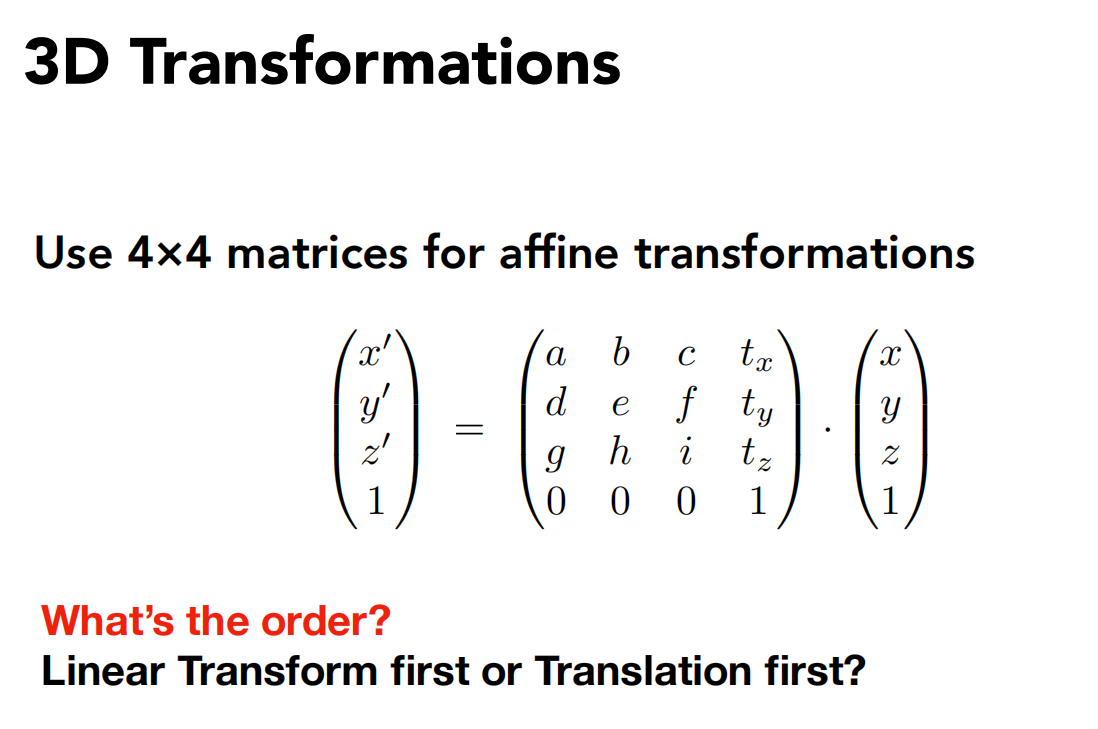
和二维的变换一样,三维的仿射变换也是线性变换再平移变换的。
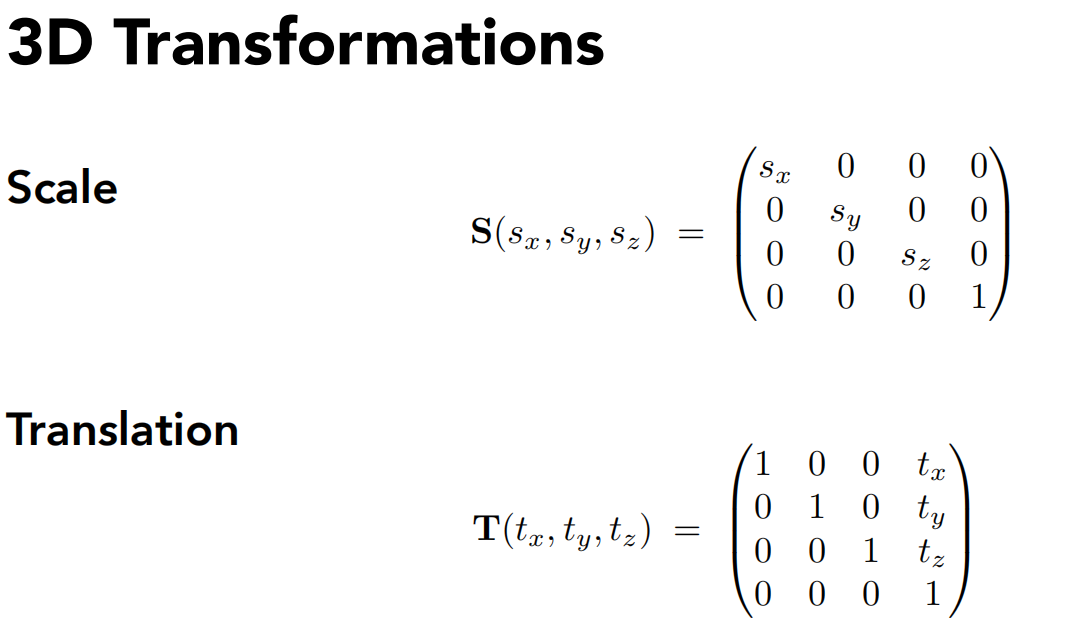
缩放和平移(变换)
旋转(变换)
旋转变换矩阵

三维的旋转分为绕着x、y、z三个轴旋转的情况。
第一个式子中是绕着x轴旋转,可以发现:
-
x的值是不变的。因此在左上角3*3的线性变换矩阵中,其第一行和第一列都是100(图中蓝色框框)
-
y的值和z的值都是旋转的。因此左上角3*3的线性变换矩阵中,右下角的2*2的矩阵是变化的,这其实是因为y和z都旋转了相同角度。(图中红色框框)
第三个式子中是绕着z轴旋转,和绕着x轴旋转的情况分析方式一样。
第二个式子中是绕着y轴旋转,其式子就有些不同了。其旋转矩阵的值是其他的负值。
-
坐标系的建立是用向量叉乘的方式建立的。本门课用的是右手螺旋定则判断正负(方向)。
-
在确定x轴时可以用y叉乘z;z轴可以用x叉乘y。
-
而y轴,只能用z叉乘x,x叉乘z是负值,所以其旋转矩阵的值是其他的负值
欧拉角

-
从RX,Ry,Rz组成任意3D旋转?
-
所谓欧拉角
-
常用于飞行模拟器:滚转、俯仰、偏航
任意的一个旋转,都可以写成绕x、y、z旋转的组合。
三个轴旋转的旋转角,称为欧拉角。
罗德里格斯旋转公式

简单来说就是将任意的旋转写成一个旋转公式,该公式可以将旋转“分解”到三个轴上。
罗德里格斯公式提供了一个旋转矩阵,旋转矩阵定义了一个旋转轴n和旋转角度α。
-
这里旋转轴默认过原点,那么就是起点是原点,方向是n,旋转角度是α旋转。
-
如果要实现真正的绕任意轴旋转(即轴可以平移),那么就得平移这一条轴到能自转的情况(即让这个轴的起点与原点重合),先旋转(自传),转完再移回去。(所有的旋转都是自旋转,上节课提到的绕着某个点旋转也是得先平移让旋转点与原点重合,旋转完后再平移回去)
-
图中公式最后的大N,就要看这个公式的推导。闫老师把推导过程的pdf发了出来,配合这个视频(games101罗德里格斯旋转公式推导)大概是明白了怎么推到的。(但自己推那是真搞不定,只能说数学水平真的决定计算机的上限。。。)
-
推导过程中,有涉及到两个向量的叉乘。在进行两个向量的叉乘时,可以用矩阵的形式,因此才会出现最后面那个矩阵N。
-
(第二节的向量叉乘:)
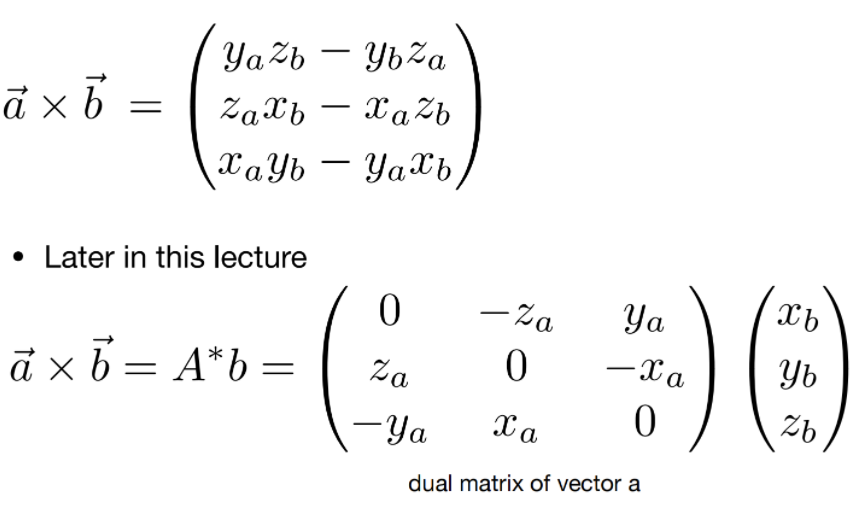
在三维中的两个向量的叉乘方法,就是图中第一条式子。而叉乘也可以写成下方第二条式子的样子(矩阵的形式)。
四元数
四元数是为了给旋转做差值才引入的。
-
假设一个旋转矩阵是旋转15°,另一个是旋转25°。如果将两个矩阵加起来求平均,结果并不是20°。
-
这是因为旋转矩阵不适合做差值。
闫老师没有深入讲这个四元数,提了一嘴。后续自己会找些资料研究研究,毕竟unity里就有这个四元数。。
观测变换
变换其实是为了让三维的空间变成二维的图。
视图变换
引入
-
什么是视图转换
-
想想怎么拍一张照片 --一找个好地方,安排人(模式改造) --找一个好的“角度”来放相机(视图变换) --“茄子!”(投影变换)
模型视图投影变换,简称MVP变换。
视图变换矩阵
矩阵概念定义
-
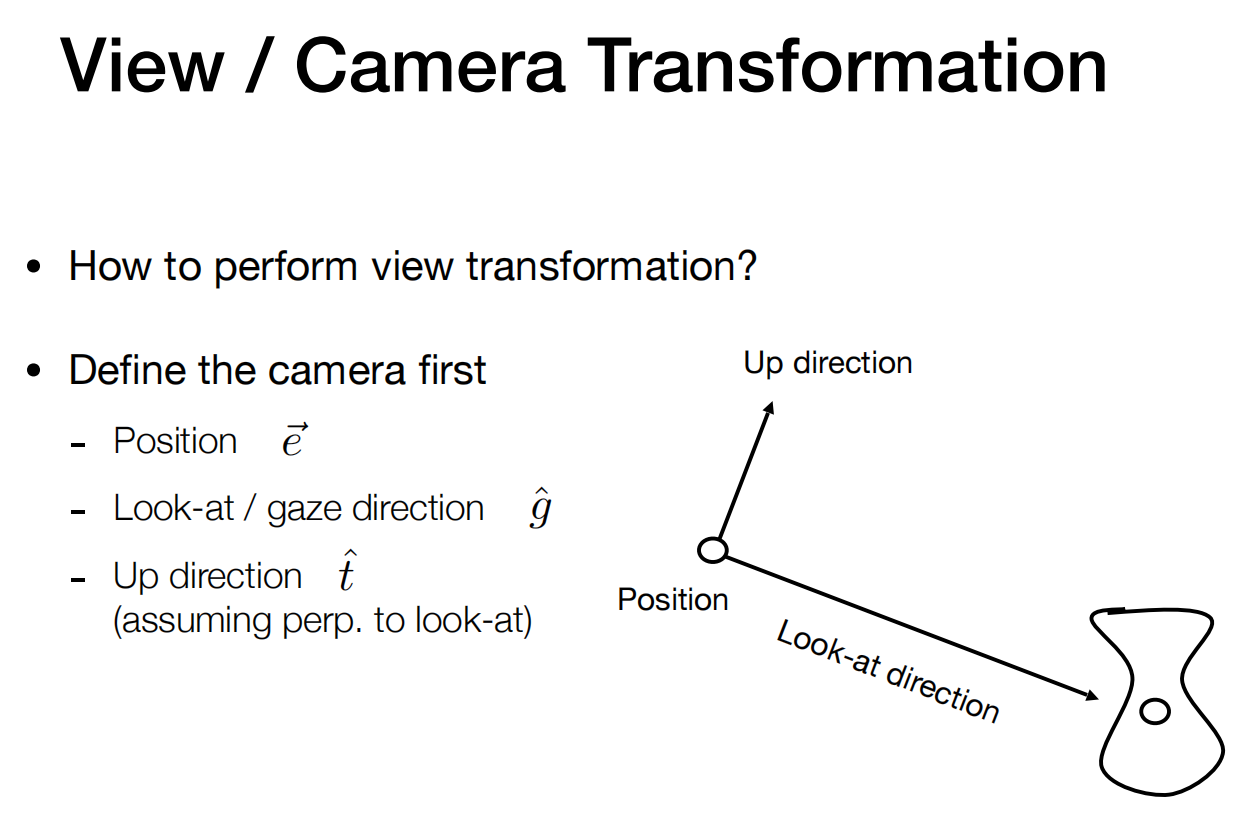
怎么进行视图变换?
-
定义相机 --位置 --注视/凝视方向 --向上方向 (假设是 xx 观看)
-
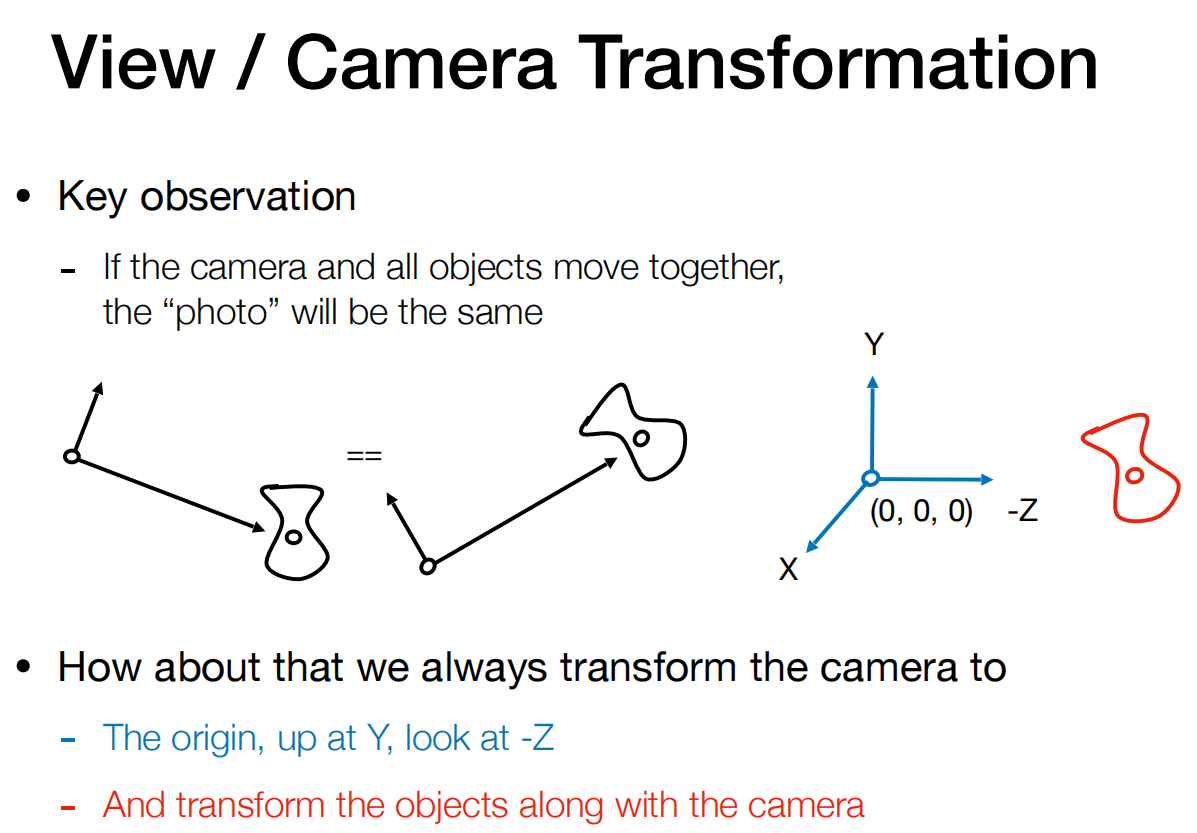
关键观察 --如果相机和所有对象一起移动,“照片”将是相同的
-
不如我们总是把摄像机转换成 --原点,在Y上,看-Z --与相机一起变换对象

-
用 Mview 变换相机 --它位于原点,在Y的上方,看-Z
-
M在数学中如何? --将 e 平移到原点 --将g旋转到-Z --将t旋转到Y --旋转(g叉乘t 可以认为是图中绿色坐标轴) 至X --很难写!
矩阵推导
-
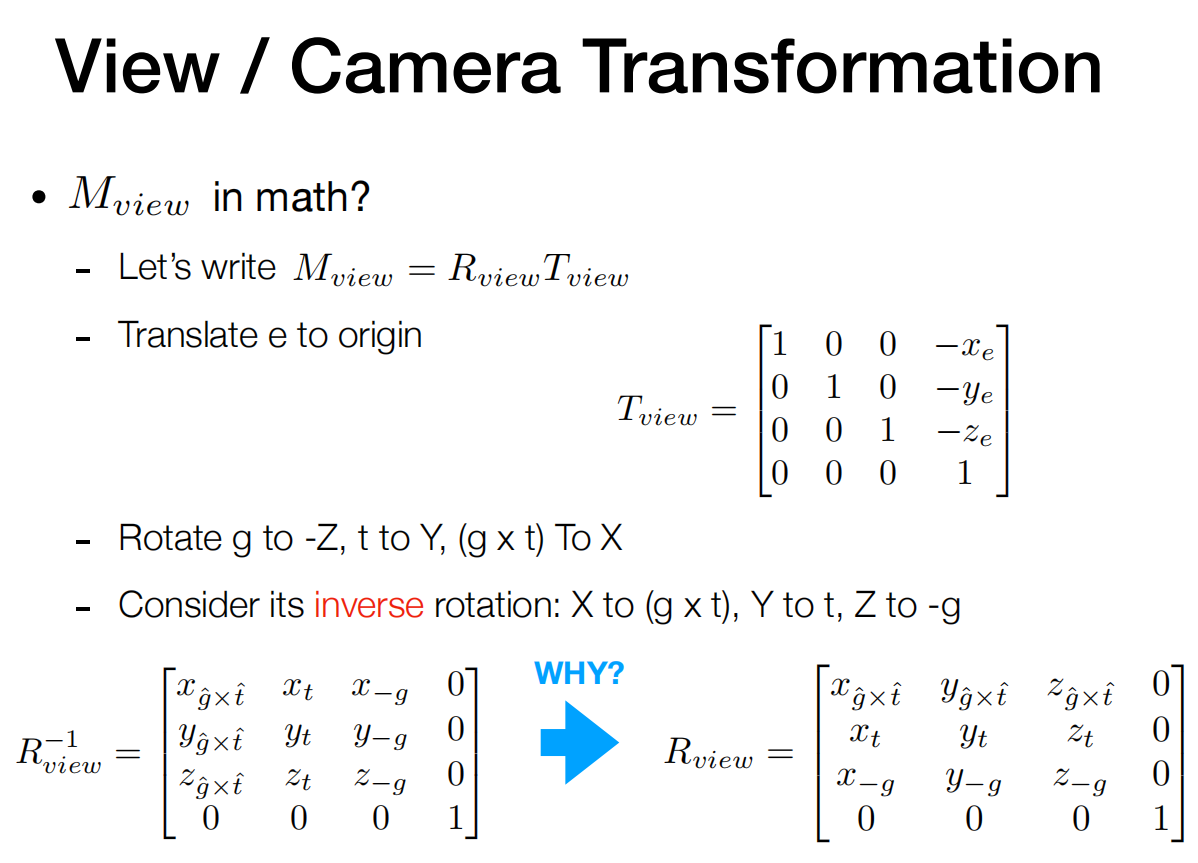
Mview如何计算? -- Mview = Rview Tview
-
平移到原点(Tview就是平移矩阵)
这里是先平移(Tview平移矩阵)再线性变换(Rview旋转矩阵)。
对于Rview,我们需要将视图的坐标系转成标准的坐标系。即g旋转到-Z;t旋转到Y;(g叉乘t)旋转到X。这样运算不好算,所以反过来让标准坐标系转成转到视图的坐标系。图中最后一行,就是用种思想进行的公式推导:
-
Rview是视图的坐标系转成标准的坐标系的旋转矩阵。
-
Rview直接求不好求,我们反过来,先求Rview-1。(前面二维矩阵补充提到,“在旋转里,旋转θ的旋转矩阵的转置 等于 旋转θ的旋转矩阵的逆”。)
-
Rview-1的求法则是和前面求“旋转矩阵的ABCD”一样,用特殊值法。
-
Rview-1求出来,Rview-1 = Rview-T。
-
此时让Rview-T再转置回去就可以得到Rview。
投影变换
引入
投影
-
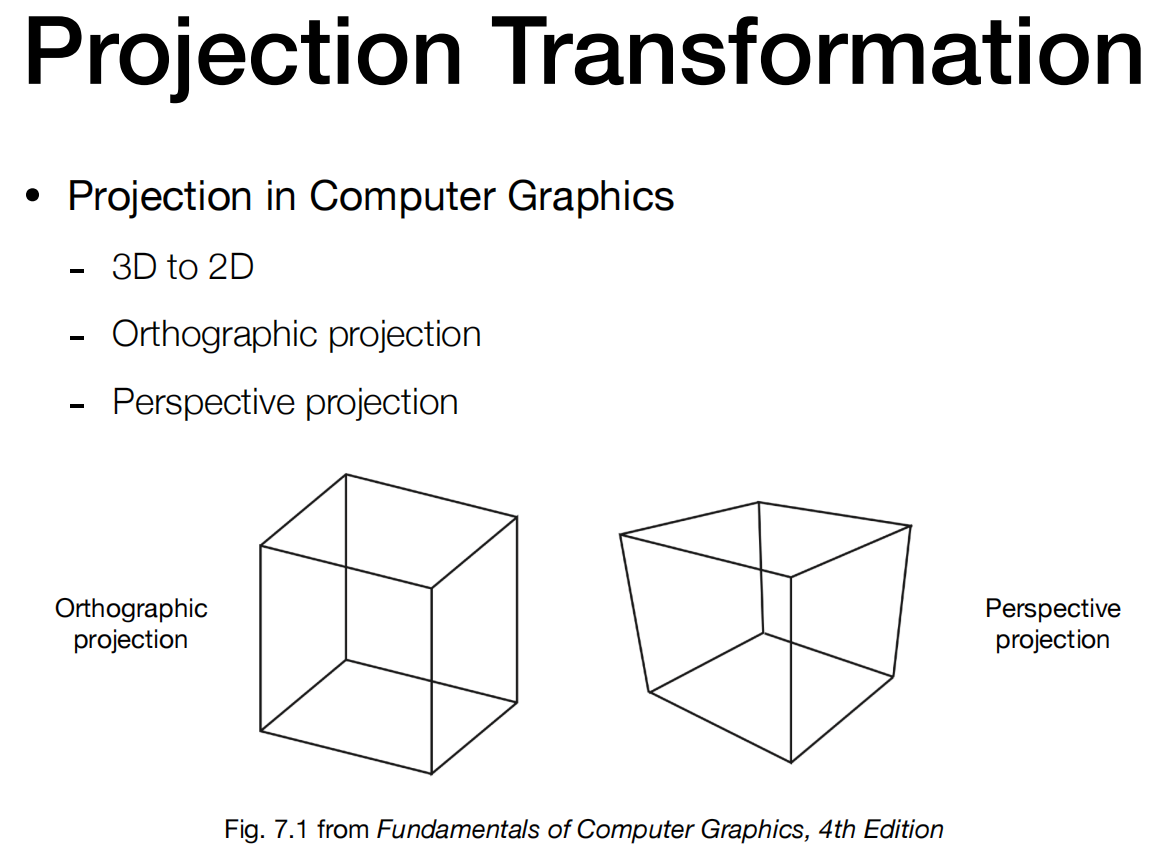
计算机图形学中的投影 --3D至2D --正交投影 --透视投影
上图的左下角是正交投影。正交投影并不会有近大远小的现象,透视会。
上图的右下角是透视投影。原本平行的两条边,在这种投影下,会有相交。这里更像是人眼睛的效果。
摄像机的成像方式

左侧透视投影,摄像机放在某一个位置上看作一个点。以摄像机点为起点,做射线形成空间的一个锥体(视锥体)。在椎体中,通过“最远”和“最近”的设定,将“最远”和“最近”的区域的东西全显示在进出的图片上。
正交投影

-
一个简单的方法来理解 --摄像头位于原点,看着-Z,向上看着Y(看起来很眼熟吗?) --删除Z坐标 --将生成的矩形平移并缩放至[-1,1]2
不管远处还是近处,全部放在一张图上。
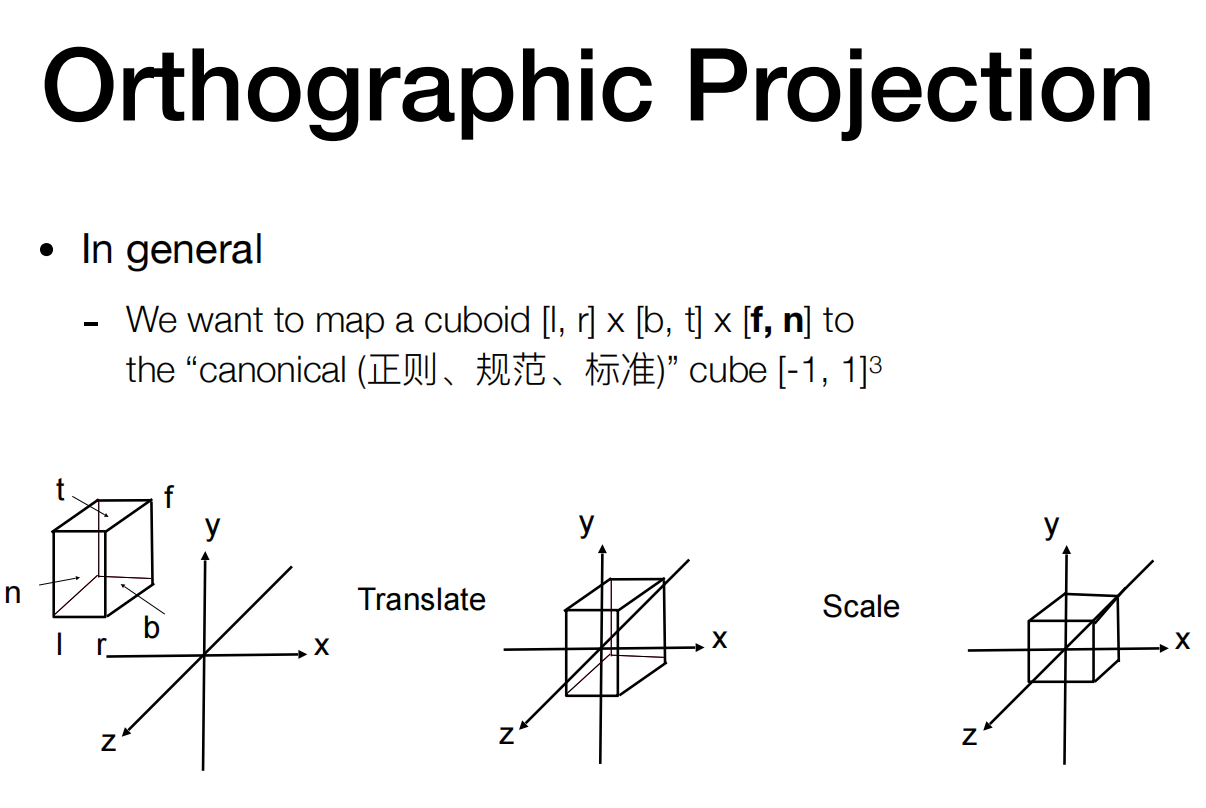
我们要把一个立方体[l,r] x [b,t] x [f,n]映射到“标准(正则、规范、标准)” 的立方体[-1,1]3上
空间中的任何一个立方体(最左侧的图),都可以通过平移、缩放等变换,变成一个标准的立方体(最右侧的图)。
x轴表示左右(立方体的[l,r]),y轴表示上下(立方体的[b,t]),而z轴是远近(立方体的[f,n]。注意离我们更远,z的值应该是更大的,f>=n。这就是一些API 比如OpenGL用左手系)
正交矩阵

先做平移,再做缩放。
透视投影
引入
-
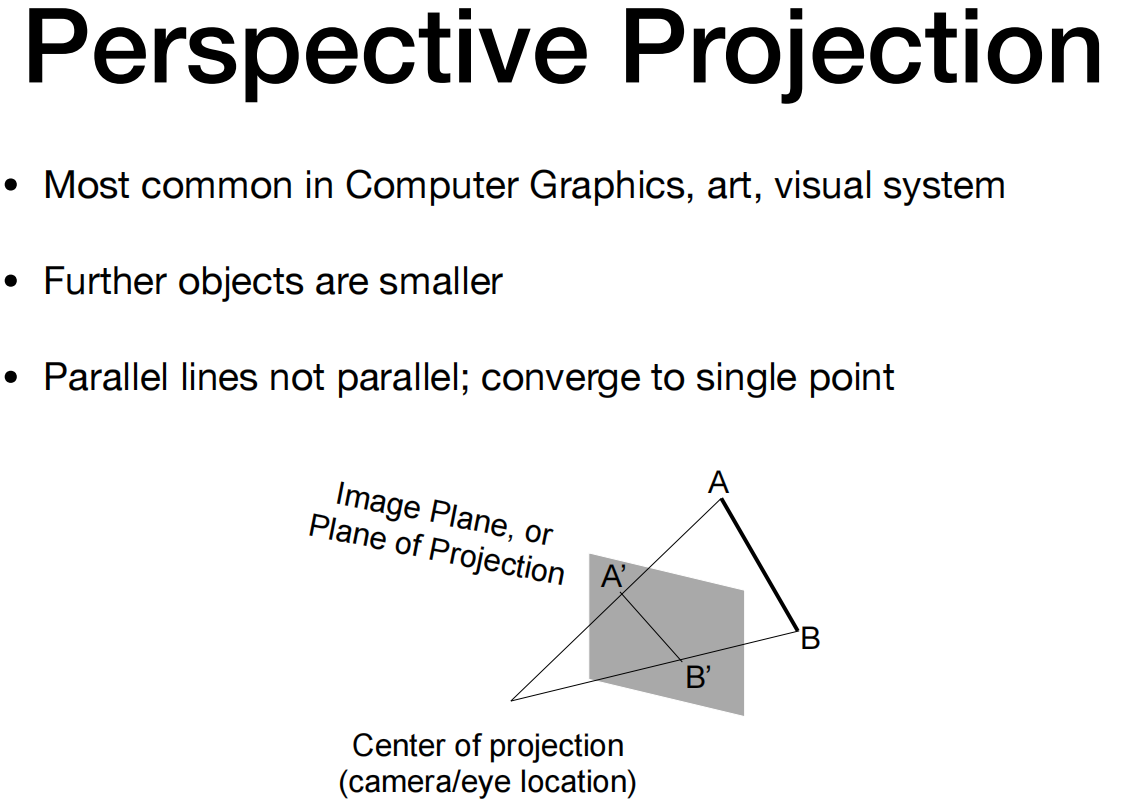
最常见于计算机图形学、美术、视觉系统
-
更远的物体更小
-
不平行的。平行线汇聚成一点。

齐次坐标中,(x,y,z,1)乘上任意不为0的数,在三维中的坐标都是不变的,都是(x,y,z)。
当(x,y,z,1)乘上z时,(xz,yz,z2)在三维中还是(x,y,z)。
“挤压”投影
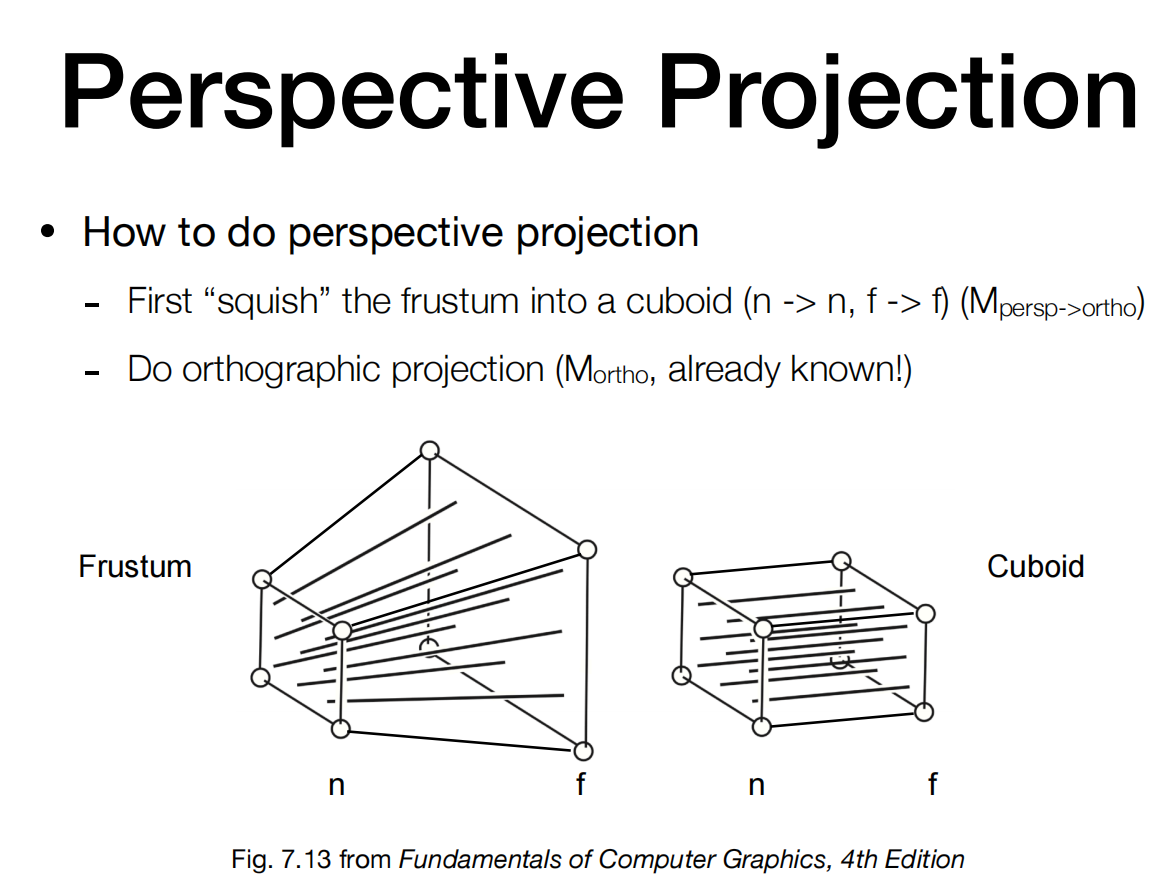
透视投影直接做或写出来比较困难。我们可以将远平面中间的位置,即这个Frustum(图形学中将远和近中间的区域叫做Frustum)从四棱竹的形状“挤”成立方体,然后再做正交投影即可。
在“挤”的过程中,要做一些规定:
-
最近的平面不能变
-
要“挤”的z轴上的值不会变化(只向自己平面内中间收缩)
-
远平面的中心点也不会发生变化
“挤压”矩阵
-
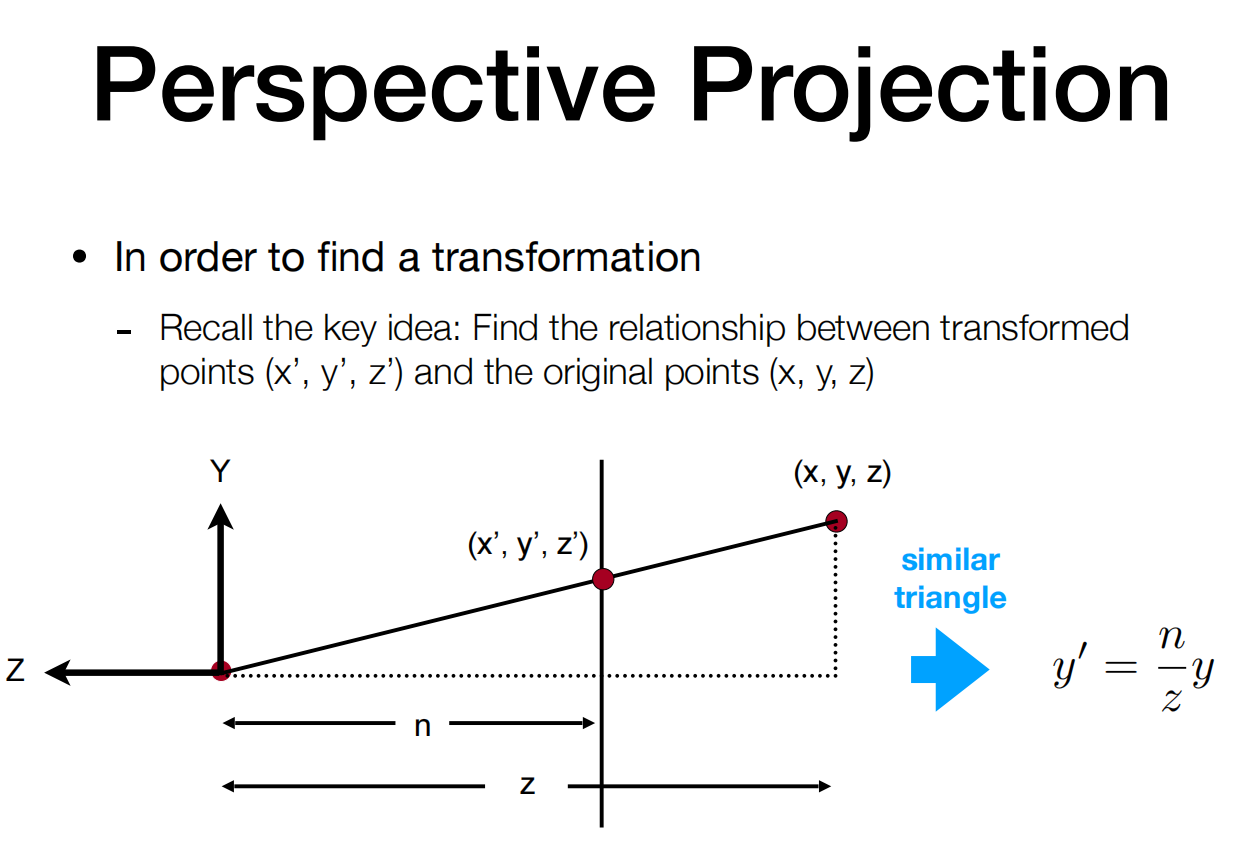
回忆一下关键思想:找出变换点(x’,y’,z’)和原始点(x,y,z)之间的关系
通过相似三角形,可以得到变换点和原始点之间的关系。

图中第一个式子就是变换点和原始点之间的关系。
图中第二个式子,是原始点到变换点的过程。(x,y,z,1)会被映射成最右边的向量。
矩阵推导
-
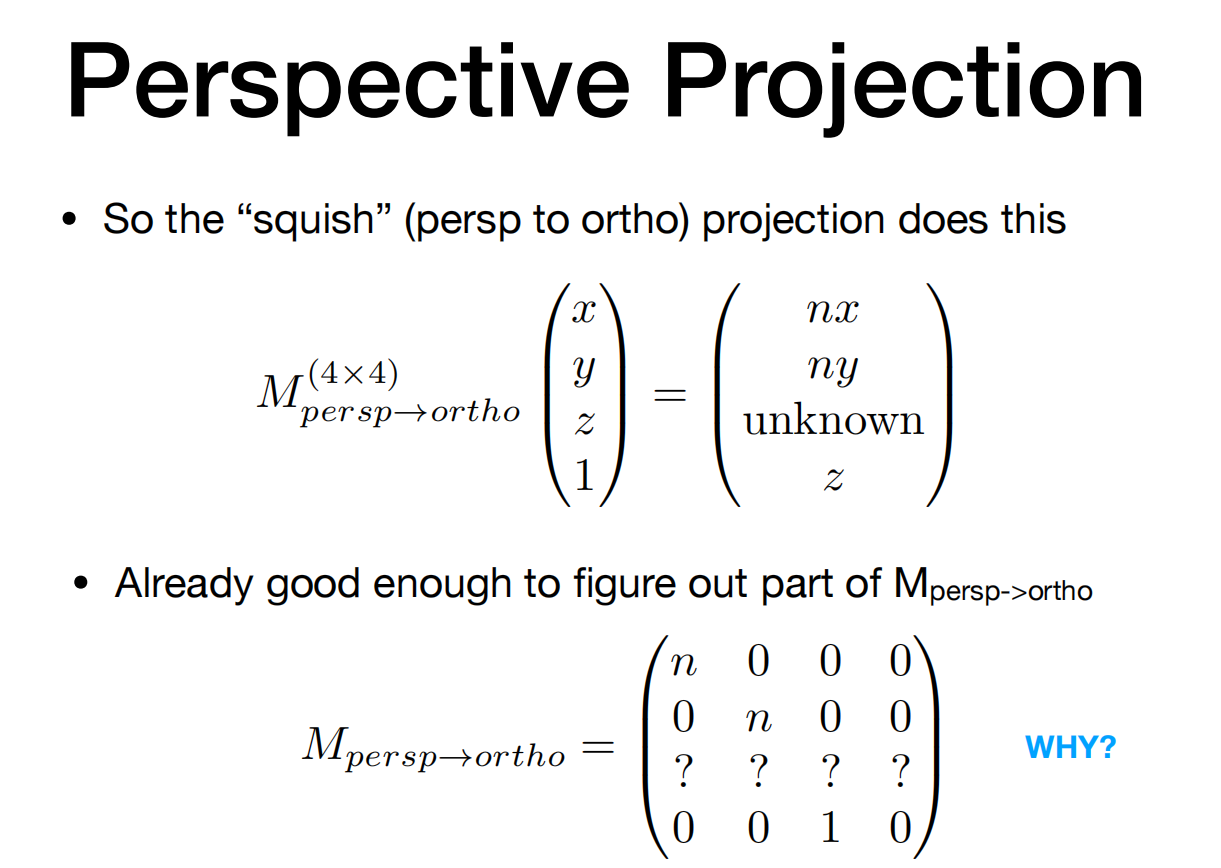
所以“挤压”(透视到正交)投影就是这样做的
-
可以找出部分的Mpersp->ortho
Mpersp->ortho就是挤压矩阵。
图中第一个式子表示,用挤压矩阵Mpersp->ortho乘以原始点就可以得到最后的变换点。原始点和变换点都部分已知,求出挤压矩阵即可。
图中第二个式子是求出的“挤压”矩阵(数学算出来的。。。)。第三行不知道,先放着。
矩阵第三行推导
这里的推导,emmmm怎么说呢,还是在用特殊值推导。了解下推导过程就好。。

-
如何求出图中矩阵的第三行 --有什么有用的信息吗
-
观察:第三排负责 --近平面上的任何点都不会改变 --远平面上的任何点的z都不会改变
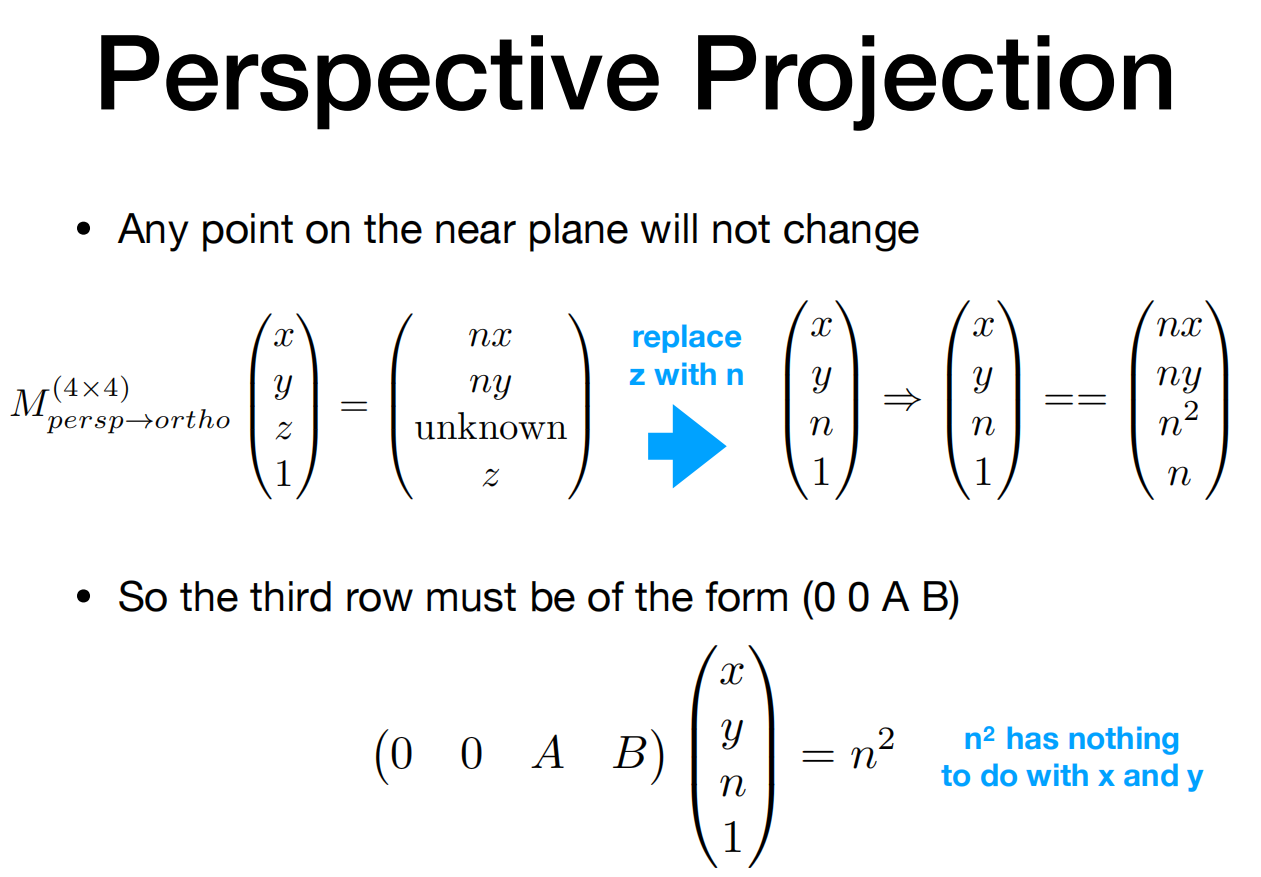
信息1:近平面上的任何点都不会改变
-
近平面上的任何点都不会改变。 用n代替z的值
-
所以第三行一定会是(0 0 A B)的形式 n2与任何x y 上的值都无关
n为近平面到摄像机的距离。
这里就是先让原始点的z值为n,然后x y值依旧不知道。此时就会变成:矩阵第三行(? ? ? ?) 乘以 列矩阵(x,y,n,1) 等于n2。

即:?x+?y+?n+?=n2(矩阵的乘法,第i行分别乘以第i列的元素然后相加)
然后观察 ?x+?y+?n+1=n2 这个式子,等号右边没有出现任何的x y,那么他们的系数只能是0。第三四个系数还是不知道,设为A B。因此就有了(0 0 A B)这个东西,从而能得到 An+B=n2 这个式子。
信息2:远平面上的任何点的z都不会改变

和信息1一样,带入特殊值。f为近平面到摄像机的距离。
在信息1推导出的(0 0 A B)基础上,带入f,可以得到Af+B=f2
联立解方程

联立两个式子,用韦达定理解出了A B。此时就能够得到Mpersp->ortho“挤压”矩阵了。
透视矩阵

通过“挤压”投影得到“挤压”矩阵后。先“挤压”再正交投影,就可以得到透视矩阵。
总结
二维三维补充
今天先是对之前缩放、平移和旋转等这些变换在二维、三维上的一些补充。
二维
二维上是对旋转矩阵的补充。
-
求物体旋转-θ时的旋转矩阵,发现R-θ = Rθ-T
-
这里引出性质(理论上二维三维都通用):在旋转里,旋转θ的旋转矩阵的转置 等于 旋转θ的旋转矩阵的逆。(数学上的正交矩阵)
三维
三维上时对缩放、平移和旋转变换的补充。
-
三维的缩放和平移变换很简单,原理和二维的一致。
-
三维的旋转变换,其会有绕x、y、z轴三个方向旋转的情况,对应的旋转矩阵都会不一样。
-
x和z的旋转矩阵分析方法一致。
-
绕y轴的旋转矩阵比较特殊,其值是x 、y的旋转矩阵的负值。这是因为在右手系下,x叉乘y是-z。
-
此外,还提及了四元数。由于矩阵不适合做差值,因此会用四元数。
观测变换
课上的重点是观测变换。观测变换有模型、视图、投影三种(简称MVP变换)
个人理解模型变换像是“建模”这种,这里就不需要讨论。
视图变换
视图变换的主要原因是摄像机的摆放问题,抽象上来看,就是坐标系的建立和转换的问题。
-
通过定义,我们规定了一套标准的坐标系。但是摄像机自身的坐标系并不一定与标准坐标系重合,这个时候我们需要进行坐标系的转换(视图变换)。
-
视图变换时,要将视图(定义的摄像机的前后上下,原点,在Y上,看-Z)坐标轴通过平移、旋转等变换回到标准坐标系上。
-
视图坐标的X轴是通过y和z叉乘得到,要将一个叉乘旋转比较麻烦。因此可以反过来,让标准坐标系旋转到视图坐标系上。接着通过前面的正交矩阵性质(在旋转里,旋转θ的旋转矩阵的转置 等于 旋转θ的旋转矩阵的逆),能够求出旋转矩阵。
-
平移矩阵很简单,直接是原点的移动就可以得到
-
视图变换是先旋转,再平移。通过旋转矩阵和平移矩阵,就可以算出视图矩阵。
投影变换
投影变换是将三维的画面投影到一张二维图像上,有正交和透视两种方式。
正交变换
正交投影比较简单,平移变换加上缩放变换即可得到。同理正交矩阵也是通过平移矩阵和缩放矩阵就可以算出。
透视变换
透视投影比较复杂。
-
透视变换中为了不涉及坐标系之间的变换,引入了“挤压”的想法。透视投影做“挤压”投影,再做正交投影,就可以得到一张二维二维画像。
-
“挤压”投影的“挤压”矩阵推导起来比较复杂,后半节课都在干这个事情。
-
总的来说,就是先利用相似三角形、变换点和原始点之间的关系和齐次方程的特性,得到出第三行以外的“挤压”矩阵值。
-
第三行通过观察到的两个信息(挤压时近平面和远平面点的关系),带入特殊值解方程推出来的。
-
算出“挤压”矩阵后,根据前面的正交矩阵,就能得到透视矩阵。
课堂遗留问题
在透视投影做“挤压”时,近平面的所有点不变,远平面的所有点z值不变。那么远近平面中间的点,经过“挤压”变换后,z值会如何变化呢?(这个点会被推向近平面,还是推向远平面)















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









