



企业痛点一击即中
你是否还在为这些问题头疼:
核心业务系统缺乏文档,新人上手困难
老员工离职带走关键代码知识
系统升级维护成本居高不下
业务逻辑复杂,代码理解困难
OpenDeepWiki最新版本专为解决企业遗留系统文档缺失问题而生。
核心功能重磅升级
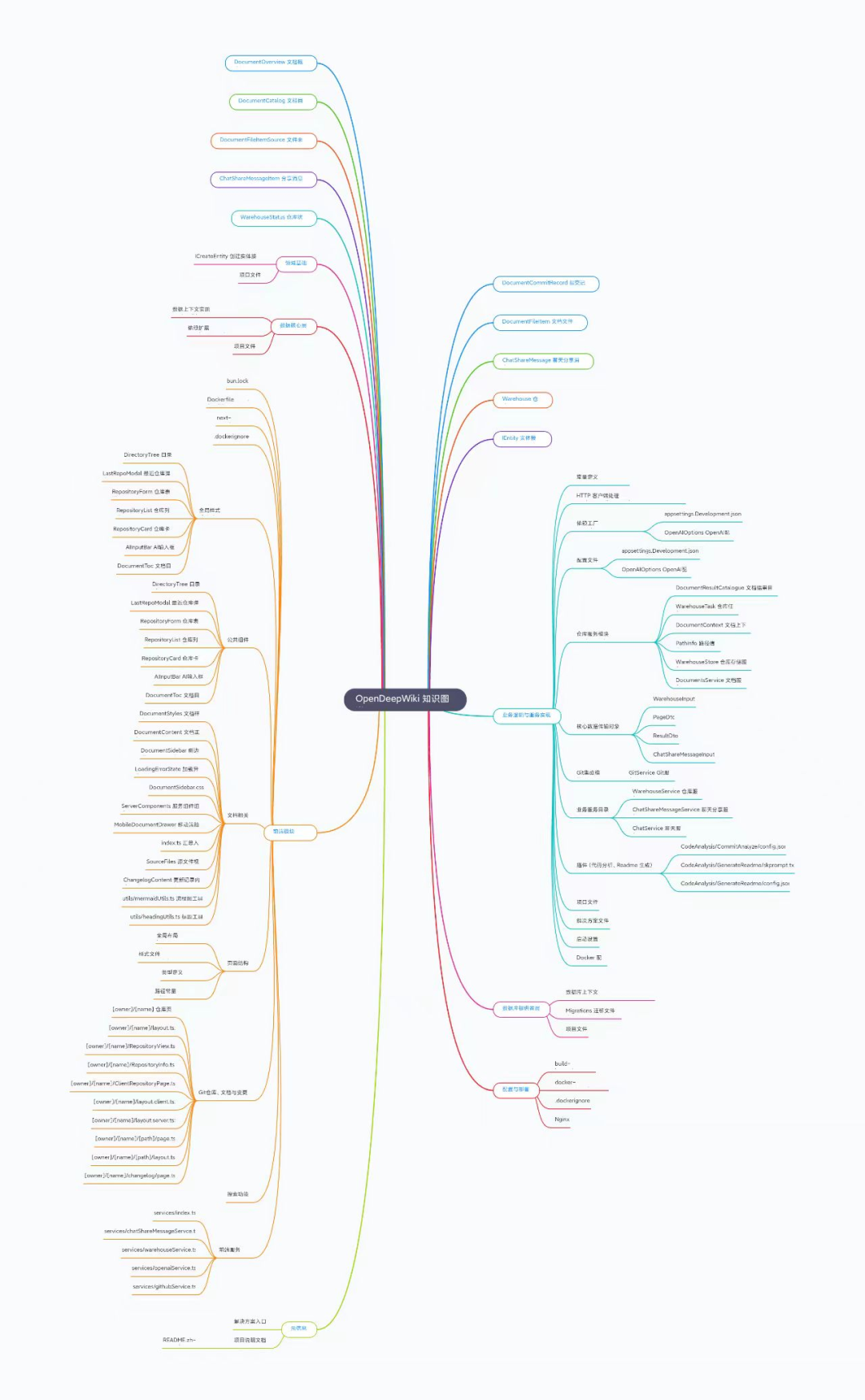
1. 项目架构思维导图自动生成
无需人工梳理,AI自动分析代码结构,生成清晰的架构思维导图。让复杂的企业级系统架构一目了然,快速定位核心模块和依赖关系。
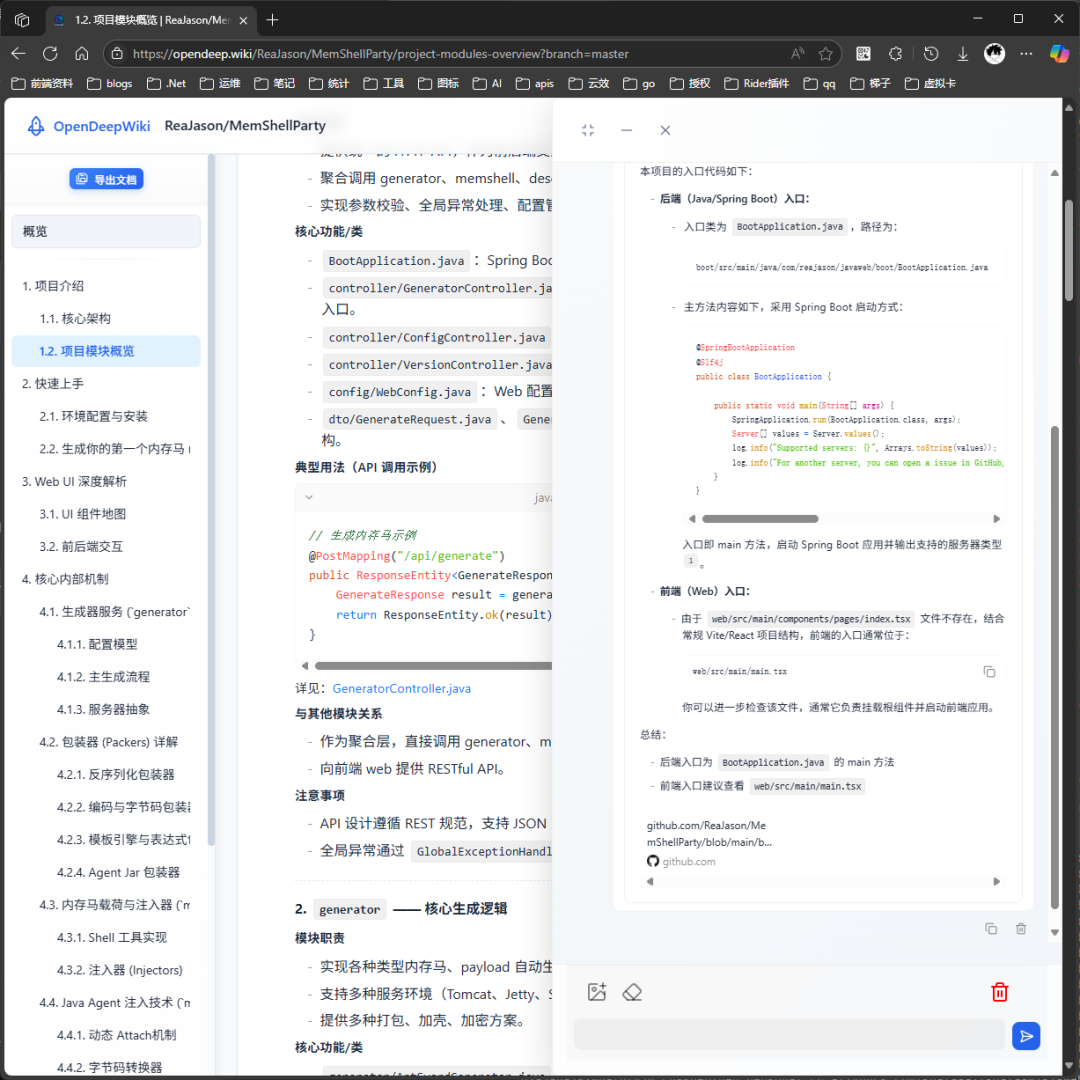
2. 智能问答系统全面上线
告别翻阅代码的痛苦,直接与系统"对话"。想了解某个业务流程?想知道接口调用逻辑?直接提问即可获得精准答案,大幅提升维护效率。
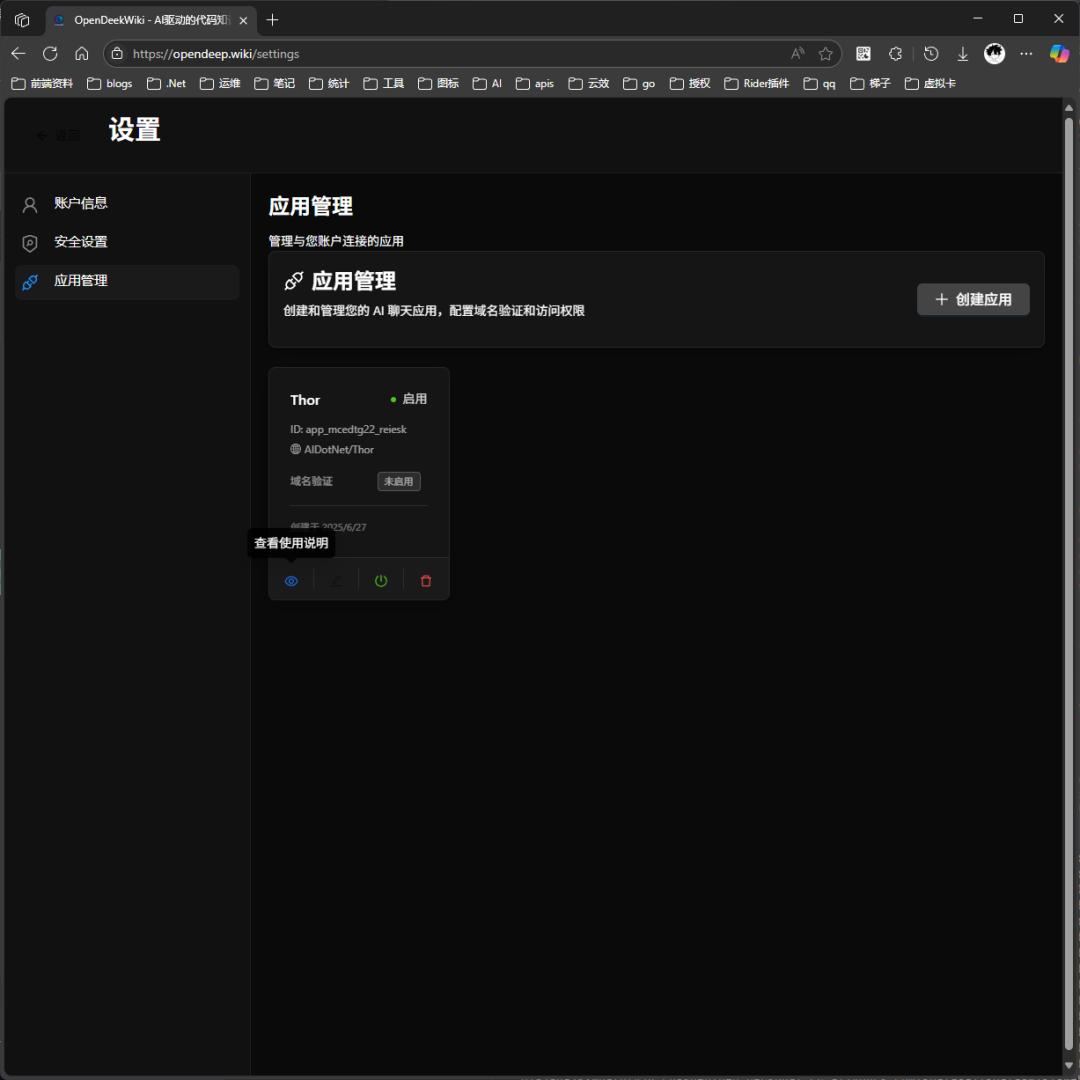
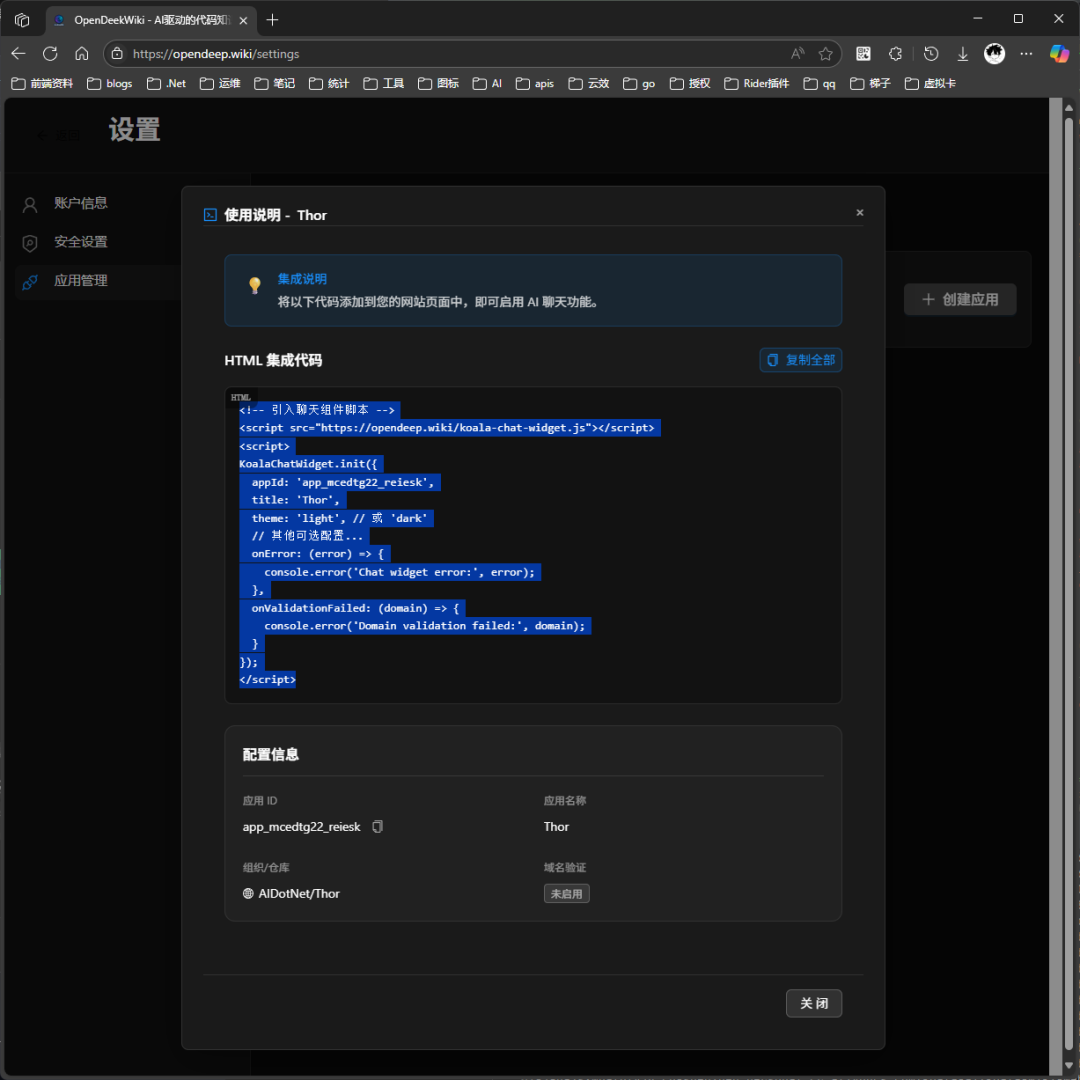
3. 企业级集成部署
支持私有化部署,数据安全可控。通过JavaScript嵌入,轻松集成到企业内部系统,为团队提供统一的代码知识库。
企业价值立竿见影
降低维护成本:新人快速上手,减少学习时间60%
提升开发效率:代码逻辑清晰可查,问题定位更精准
知识沉淀:防止关键知识随人员流失
风险控制:系统架构透明化,降低维护风险
适用场景
金融系统:核心交易系统文档化
电商平台:复杂业务逻辑梳理
ERP系统:多模块依赖关系分析
遗留系统:老旧代码现代化改造前的分析
技术保障
基于.NET 9企业级框架
支持主流AI模型(GPT、Claude、国产大模型)
支持企业级数据库(PostgreSQL、SqlServer、Oracle)
完整的权限管理和数据安全机制
项目地址: https://github.com/AIDotNet/OpenDeepWiki
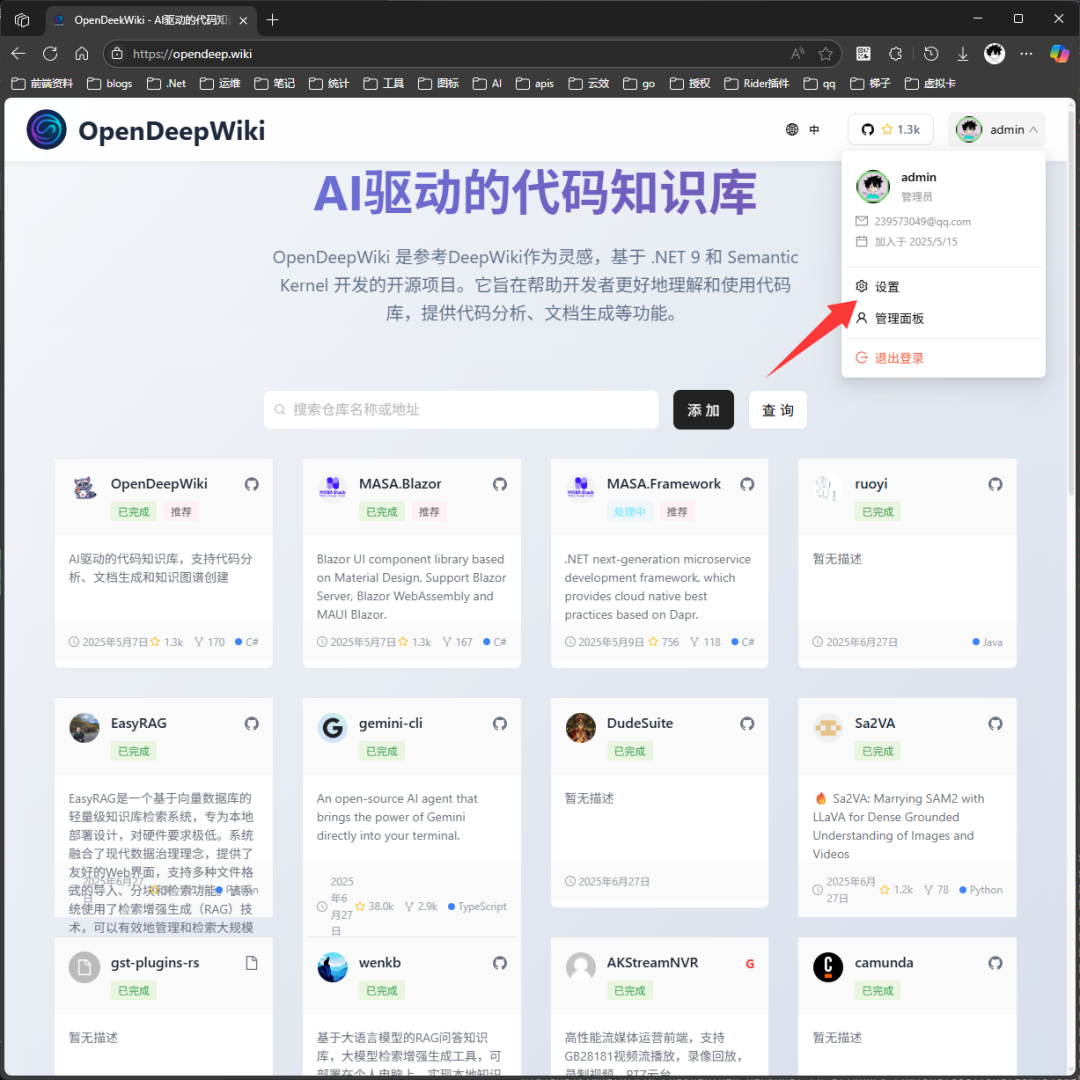
在线体验: https://opendeep.wiki/
加我进群



















 1481
1481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









