







原文链接:https://www.jiqizhixin.com/articles/2019-04-29-3
https://blog.csdn.net/inshallah/article/details/99446967
一、背景
近年来,3D 点云分析在自动驾驶和机器人等领域有着诸多的应用,因此得到了各界广泛的关注。主流的点云分析任务都需要对点云的 3D 形状进行高级别的理解,比如点云识别。但从不规则分布的 3D 点中很难推理学习其隐含的 3D 形状。随着以卷积神经网络(CNN)为代表的深度学习方法的兴起,大量的研究工作致力于将 CNN 在图像分析上的巨大成功复制到点云处理领域。然而由于点云数据的不规则性,经典的图像网格卷积难以适用。

一般来说,在点云上进行卷积学习主要面临三大挑战:
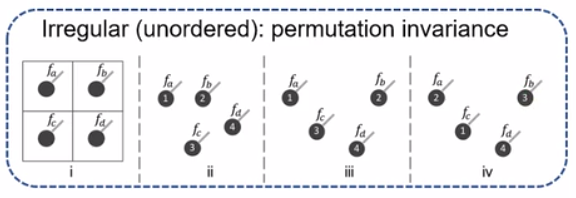
点云由无序的点集构成,因此卷积需要对点的输入顺序具有置换不变性。
点云分布于 3D 几何空间,因此卷积应当对点云的刚体变换具有鲁棒性,比如平移、旋转等。

点云形成一个隐含的形状,因此卷积得到的表征应当具备有区分力的「形状意识」。
本文提出 Relation-Shape CNN(RS-CNN)来缓解上述挑战。RS-CNN 的核心是从几何关系中推理学习 3D 形状,因为在本文看来,3D 点之间的几何关系能够有表现力的编码其隐含的形状信息。所提出的 RS-CNN 在点云分类、部件分割和法向估计三个任务上均达到了最佳水平。并且得益于对几何关系的建模,RS-CNN 能够自然地实现置换不变性以及刚体变换鲁棒性。为了验证 RS-CNN 的几何形状推理能力,本文还在 3D 点云的 2D 投影空间中做了测试,实验表明,RS-CNN 依然具备优秀的形状识别性能。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2575
2575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









