







热敏电阻
NTC(Negative Temperature Coefficient)是指随温度上升电阻减小、具有负温度系数的热敏电阻现象和材料
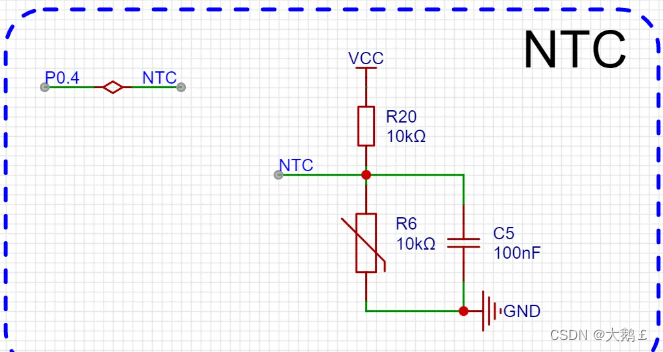
原理图
| ADC功能 | 引脚 |
|---|---|
| ADC0 | P1.0 |
| ADC1 | P1.1 |
| ADC2 | P5.4 |
| ADC3 | P1.3 |
| ADC4 | P1.4 |
| ADC5 | P1.5 |
| ADC6 | P1.6 |
| ADC7 | P1.7 |
| ADC8 | P0.0 |
| ADC9 | P0.1 |
| ADC10 | P0.2 |
| ADC11 | P0.3 |
| ADC12 | P0.4 |
| ADC13 | P0.5 |
| ADC14 | P0.6 |
温度计算步骤
1. 通过ADC采样计算出热敏电阻位置的电压
V n t c 2.5 = A D C _ V a l u e 4096 V n t c = 2.5 × A D C _ V a l u e 4096 \begin{aligned} \frac{V_{ntc}}{2.5} &= \frac{ADC\_Value}{4096} \\ \\ V_{ntc} &= 2.5 \times \frac{ADC\_Value}{4096} \end{aligned} 2.5VntcVntc=4096ADC_Value=2.5×4096ADC_Value
○ ADC_Value就是通过ADC采样出来的的数值,范围是0-4096。
○ V_ntc即为对应的电压值
2. 通过欧姆定律计算热敏电阻的阻值
V n t c R n t c = 3.3 V − V n t c R 10 K = 3.3 V R 10 K + R n t c \frac{V_{ntc}}{R_{ntc}} = \frac{3.3V-V_{ntc}}{R_{10K}} = \frac{3.3V}{R_{10K} + R_{ntc}} RntcVntc=R10K3.3V−Vntc=R10K+R
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











