






目录
1 绪论 1
1.1课题研究背景及意义 1
1.2国内外研究现状及发展趋势 1
1.2.1国外研究现状 1
1.2.2国内研究现状 2
1.2.3发展趋势 2
2爬壁机器人总体设计方案 3
2.1吸附方式 3
2.2行走机构 3
2.3检测方式 4
2.4外部结构 5
3零部件结构设计及校核 6
3.1电机的选择 6
3.1.1电机类型和结构形式 6
3.1.2电机容量选择 6
3.1.3电机转速 7
3.2联轴器的选择 7
3.3轴的设计及校核 8
3.3.1轴的材料 8
3.3.2轴的最小直径 8
3.3.3轴的结构设计 10
3.3.4轴的校核计算 13
3.4车板的结构尺寸 17
4 爬壁机器人ADAMS运动学分析 18
4.1 ADAMS运动学分析意义 18
4.2仿真步骤 18
4.3仿真数据及分析 18
4.4仿真动画 24
4.5运动学仿真总结 25
5 磁轮设计及磁力仿真 25
5.1永磁体材料的选择 25
5.2磁轮的选择和设计 26
5.3磁轮的仿真及分析 27
6 总结及展望 28
6.1总结 28
6.2展望 29
参考文献 30
致谢 32
2爬壁机器人总体设计方案
爬壁机器人的总体设计首先需要确定其吸附方式、检测方式、行走机构这三个方面。对于爬壁机器人的要求首先是保证准确不漏检,然后是能够有效率地检测,最后就是兼顾其实用性和通用性。
2.1吸附方式
目前的吸附方式主要有真空吸附、电磁吸附、永磁吸附、推动力吸附等吸附方式,由于此处爬壁机器人主要是检测油罐壁,其为钢制材料,所以选用磁吸附是比较方便实用的。而永磁吸附相对于电磁吸附,永磁吸附具有吸附力大、受表面状况影响小、系统意外断电不影响吸附力等优点。
2.2行走机构
行走机构目前主要有三种,即轮式、履带式 、足式。
足式爬壁机器人其优点在于足式爬壁机器人非常灵活,越障功能强大,对于复杂的表面也能进行检测,能够适应多种工况。但其缺点是对于爬壁机器人的腿部协调运动控制比较复杂,且由于其腿部细长,所以这种足式爬壁机器人的负载能力是比较弱的。
履带式爬壁机器人是目前运用比较多的一种机器人行走机构,其通过履带结构行走,并通过两边的履带的差数转动实现转弯,因为其行走机构是履带,所以相较于其他行走机构具有接触面大,吸附能力强,负载能力强等优点。其缺点便是由于履带过大,机构比较笨重,在转弯,转向时不够灵活。
至于轮式行走机构是目前应用最为广泛的一种行走机构,其优点是结构非常简单,运动较为灵活,速度快,系统稳定,在转向和转弯时比履带式灵活。其缺点是吸附力可能不够导致爬壁机器人滑移,对于壁面适应能力不是很强。
在通过对三种行走机构优缺点和爬壁机器人工作环境的分析,采用轮式这种行走机构是最佳的选择,其比履带式结构简单,灵活,虽然适应壁面状况较履带式差,但是爬壁机器人检测的壁面一般较为平整,轮式行走机构基本能够完成任务。而相较于足式,轮式具有承重能力高,吸附能力强,且检测效率更高等优点,虽然灵活性和越障能力比足式的行走机构差,但鉴于壁面比较平整,越障能力这个优点便不是特别重要了。综上,选用轮式是比较之下最优的选择。
2.3检测方式
检测方式主要有磁粉检测、射线检测、超声波检测、涡流检测等。
射线检测是利用各种射线对材料的透射性能及不同材料对射线的吸收、衰减程度的不同来检测材料内部缺陷的一种检测方式。其局限性在于对平面性缺陷的灵敏度不高,且其危险性比较高,在用射线检测时人体必须做防护措施。
涡流检测是利用的原理是电磁感应,其具有检测探头不需和检测壁面接触的优点,但是其局限性也较多,首先其对于缺陷形状、种类、大小是比较难判断的,其次是所受干扰因素比较多,后期需要很多技术处理,且对于复杂结构其漏检的几率是比较大的。
磁粉检测则是一种物理检测,利用磁粉会进入缺陷来检测其表面缺陷。它的优点是操作简单,不需要什么专用设备,但它的缺点也是非常明显的,首先则是其只能检测所要检测物体的表面,至于内部缺陷却是不能检测, 此外,由于其操作的性质不利于自动化,因此不适应用于爬壁机器人的检测方式。
超声检测是现在运用比较多的一种检测技术,由于它的适用性、安全性,它是被广泛运用于各行各业。它的原理是在检测探头和被检测物体之间涂上一层耦合剂,让耦合剂作为超声波传递的介质,超声波从检测探头处入射通过耦合剂进入被检测物体内,当被检测物体内有缺陷时,超声波便会发生反射,此时检测探头也是一个接收探头,能够接收反射回来的超声波,并通过反射超声波的形状或衰减程度来判断被检测物体内的缺陷。其具有的优点有:能够检测多种材料,不像涡流检测只能检测金属材料,此外超声检测不需要探头和壁面直接接触,其灵敏度高,探测范围大,且其对人体没有伤害,效率高,设备简单。综合各种检测方式的优缺点,超声检测是非常适合于油罐壁面这样的平直壁面的检测。本文采取万向轮转动,里面的探头架不动,且内部充满耦合剂这样的方式进行检测。
采用轮式永磁吸附爬壁机器人并配以超声检测方式,是通过分析油罐检测任务的实际需要和现场条件确定的较为实际和可靠的方案。
2.4外部结构
目前的轮式爬壁机器人主要采用长方体四驱动结构,这种类型爬壁机器人是应用比较广泛的一种爬壁机器人结构,但其具有在其在垂直面上水平移动或转向时会造成滑移的问题,这将会导致部分检测区域的漏检。为了减小这种滑移,这里采用外部类似菱形两驱动磁轮吸附的结构如图2.1,由于两轮驱动更加方便转向,且转向时爬壁机器人整体的几何中心是比长方形的爬壁机器人几何中心的偏移更小,因此,根据理论分析其在转向时滑移将会减小。
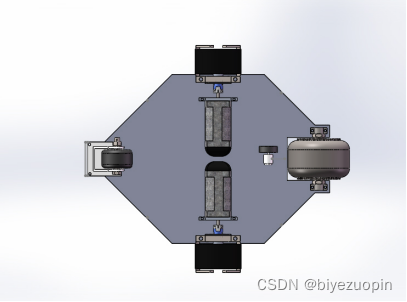
图2.1 爬壁机器人结构

































 92
92

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











