






目录
第一章 绪论 1
1.1 研究的背景与意义[1] 1
1.2 机器人的研究现状[4] 2
1.3机器人的发展趋势 4
1.4本文的主要研究内容 5
第二章 机器人总体方案设计 7
2.1 小型仓储物流移动机器人的功能 7
2.2 传感器系统[13] 7
2.3 移动载体 7
2.4 自由度与机器人的运作 8
2.5 控制方式的选择 9
2.6 小结 10
第三章 机器人的手部设计 11
3.1 手部的结构设计 11
3.1.1 概述 11
3.1.2 设计时应考虑的几个问题 11
3.1.3 手部夹紧力的计算 12
3.1.4 弹簧的计算 13
3.15 手部主轴的校核计算 14
3.2 驱动方式 17
3.2.1 手部电机选择原则 19
3.2.2 手部电机的选择 21
3.2.3 电机转速与夹紧力速度几何关系的确定 22
第四章 手臂的设计 23
4.1 手臂结构设计 23
4.2 手部质量计算 23
4.3 手臂计算及电机选择 24
4.4 小结 25
第五章 腰身及底座的设计 26
5.1 腰身的设计 26
5.1.1 腰身以上部分的重量计算 26
5.1.2 腰身计算及电机选择 26
5.2底座的设计 27
5.2.1 底座机构设计 27
5.2.2 底座以上部分的重量计算 28
5.2.3 底座电机选择 28
5.3 齿轮的校核计算 28
5.3.1 选择齿轮材料、热处理方法、精度及齿数 28
5.3.2 验算齿面接触疲劳强度 29
5.3.3 校核齿根弯曲疲劳强度 31
5.3 小结 32
第六章 结论与展望 33
6.1 结论 33
参考文献 34
致 谢 35
1.4本文的主要研究内容
本文研究了国内外仓储物流移动机器人发展的现状,通过学习仓储物流移动机器人的工作原理,熟悉了仓储物流移动机器人的运动机理。在此基础上,确定了仓储物流移动机器人的基本系统结构,对仓储物流移动机器人的运动进行了简单的力学模型分析,完成了机械手机械方面的设计(包括传动部分、执行部分、驱动部分)和该机器人的系统控制。
要机器人可以像人一样拿取东西,最基本的条件是要有一套类似于指、腕、臂、关节等部分组成的抓取和转移机构——执行机构;能像肌肉那样使手臂动作的驱动-传动系统;能像大脑指挥手那样进行动作的控制系统。这些系统的性能就决定了机器人的性能。一般而言,机器人通常就是由执行机构、驱动-传动系统和控制统这三部分组成,如图 1.1 所示。
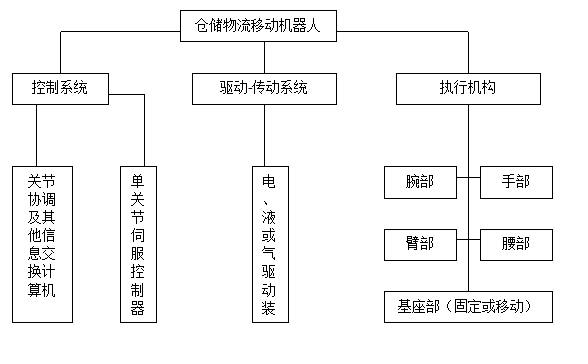
图1.1 机器人的一般组成[2]
现代智能机器人与过去相比,还具有一定的智能系统,主要是增加了感觉装置、视觉装置和语言识别装置等。目前机器人技术的研究主要集中在赋予机器人“眼睛”,使它能识别物体和躲避障碍物,还有机器人的触觉装置。机器人的这些组成部分并不是相互独立的,或者说并不只是简简单单的叠加在一起,就能构成一个机器人的。要实现我们所期望机器人能实现的功能,机器人的各部分之间必需存在着相互关联、相互影响和相互制约。

































 827
827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











